Planning
1.Path Planning
[15주차] [17주차] Path Planning / Dijkstra / (weighted) A* / Hybrid A* / RRT
2023년 7월 17일
2.Trajectory Planning
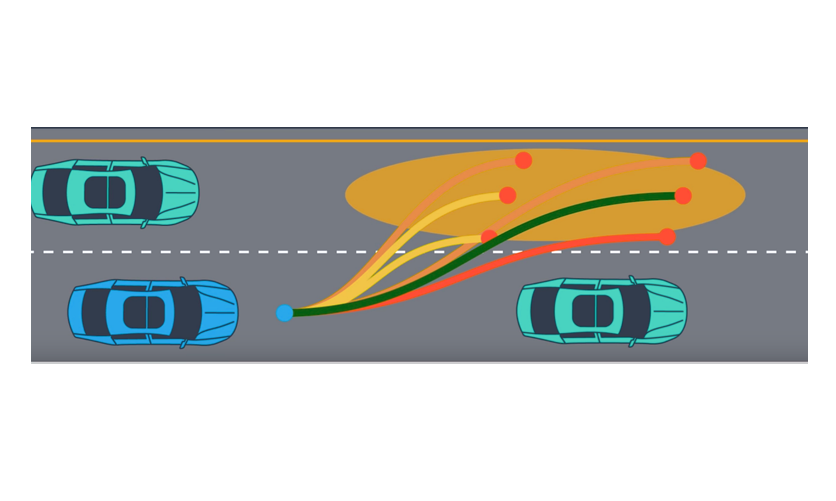
Frenet Frame / Polynomial Trajectory / Longitudinal & Lateral Trajectory / Optimal Trajectory / Collision Check / Separating Axis Theorem / MPC
2023년 8월 9일