
기존의 다른 방법
기존의 DQN: Epsilon-Greedy Algorithm을 사용해 exploration을 수행
Prioritized Experience Replay: buffer에 저장되는 각 transtition에 대해서 우선순위( 가 클수록 우선순위가 큼)를 두어, batch로 뽑을때 반영하는 방법이다.
Noisy added fully connected layer
Noisy network는 신경망의 가중치에 잡음을 추가하는 것이다. epsilon greedy method는 현 state와 전혀 상관없이 random한 것을 적용하지만, Noisy network는 state에 어느정도 dependent한 값을 적용 할 수 있다.
- 기존의 fully connected layer :
- Noisy fully connected layer :
Element-wise 곱

, →
( : noise parameter : noise variable : 잡음을 더하기 전의 w와 b)
noise variable은 gaussian 분포를 따르는 변수이고, 이를 noise paramter를 통해서 scaling함.
(noise variable)
Gaussian distribution에서 noise를 추출해 이를 활용해서 의 값을 정한다.
1. Independent Gaussian Noise (A3C)
Gaussian distribution에서 p*q → 개 q → 개의 noise추출
- 직관적으로 gaussian distribution 에서 필요한 shape만큼의 noise를 추출함
Initialisation parameters of noisy networks>

2. Factorised Gaussian Noise (DQN)
Gaussian distribution에서 p → 개 q → 개의 noise추출
- p, q개 만 distribution에서 추출한 뒤, 연산을 통해 noie variable의 shape에 맞춤
- q*p개 p개의 noise를 추출하는 과정이 오래 걸리기 때문에 p, q개만 추출한 뒤 , 를 사용해 과 를 구한다.
Initialisation parameters of noisy networks>

결론
- DQN에선 Factorised Gaussian Noise를 사용해 Noisy Net을 구현한다.
- action 선택시 weight에 더해진 noise 덕분에 random한 action을 고를 수 있게 된다.
- Agent가 자동적으로 noise의 정도를 조절한다. (noise parameter를 통해서)
- 지나친 state correlation이 생기는 것을 막기 위해 target network의 noise와 online network의 noise를 각각 생성한다.
- 결론적으로 강화학슴 알고리즘이 noise의 정도를 결정하기 때문에, hyperparameter의 tuning의 필요를 줄여주는 효과가 있다.
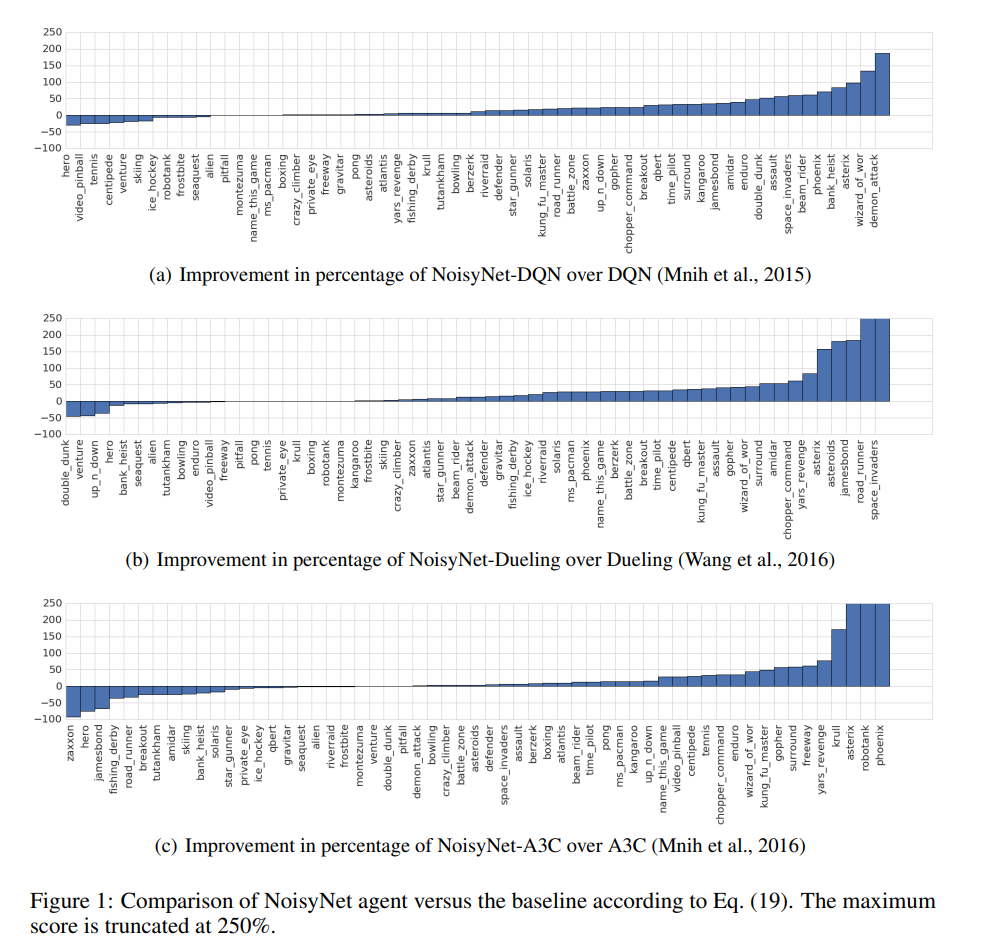
Noisy network를 적용한 적용한 경우 성능이 대체로 더 좋아졌다.

(●'◡'●)