MDP 가정
-
environment가 fully observable 하다
-
Machine의 state는 markov property 를 갖는다
즉, 이전 state에 상관없이 바로 직전 state에만 영향을 받는다. -
Markov Process는 set of finite state인 S와 state transition probability matrix P의 튜플을 의미한다.
State transition matrix는 아래와 같은 식을 의미하며 은 state s에서 s'으로 갈 확률을 의미한다.
그리고 이 때 각 행의 합은 1이다.
Markov Reward Process
-
위의 Markov Process에 Reward 개념을 더한 process를 의미한다.
이고 현재 시간에 대한 reward이지만 시간은 t+1임에 유의하자 -
Return 는 아래와 같이 정의되고 는 discount factor로 미래에 얻는 수익은 감산하여 취급된다고 이해하면 된다 (금전적인 보상의 경우 이율을 의미할 수 있고 생명체가 얻는 보상의 경우 현재 이득을 더욱 값지게 느낀다는 형태로 이해)
-
state value function v(s)는 현재 state가 s일 경우 expected return 을 나타내는 함수이고 수식으로는 아래와 같이 표현된다
-
state value function 에서 Bellman equation을 도출할 수 있다.
Bellman equation for MRP (Markov Reward Process)
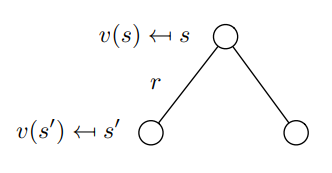
- 위의 value function 을 이용해 Bellman equation을 도출하는 과정은 아래와 같다.
다이어그램으로 나타내면 아래와 같다.
- value function은 역행렬로 연산가능 하지만 state 개수 n에 대해 의 time complexity를 갖기 때문에 향후 우리는 DP, Monte Carlo, Temporal-Difference 방법에 대해 배우게 된다.
Markov Decision Process
-
Markov Reward Process에 finite action set A가 추가되며 state transition probability matrix와 reward function 에 action A에 대한 조건이 추가된다.
-
policy는 아래와 같이 정의된다.
이로부터 deterministic policy가 아닌 state s에서 어떤 action a를 취할 probability를 나타내는 stochastic한 방식을 택함을 알 수 있다 -
MDP에서 MRP로의 변환방법은 아래와 같다. 둘의 차이는 state transition probability matrix와 reward function에 있고 MDP에서 모든 action에 대해 합을 구한다면 action에 대해 고려하지 않은 MRP를 구할 수 있을 것이고 수식은 아래와 같다
-
value function은 이제 policy dependent하게 계산되며 식은 아래와 같다.
새로운 개념인 action-value function이 도입되며 식은 아래와 같다.
현재 state가 s이고 취하는 action이 a일 때 얻을 수 있는 return의 기대값을 의미한다.
Bellman equation for MDP (Markov Decision Process)
-
직관적인 표현식은 각각 다음과 같다.
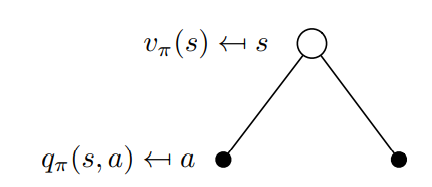
수식 (1)은 모든 action에 대한 확률과 action시 reward를 곱한 값으로 다음 action에 대한 기대값으로 이해할 수 있다.
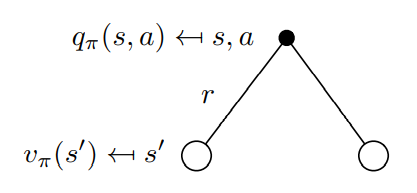
수식 (2)는 현재 택한 action에 대한 reward 와 action 으로 인해 전환된 다음 state s'에서 얻을 return 의 기대값을 더한 것으로 이해할 수 있다. -
이로부터 value function 은 value function으로만, state value function은 state value function 으로만 표현하면 아래와 같다.
optimal value function
- optimal state-value function 과 optimal action-value function은 각각 모든 policy에 대해 최대 값을 갖는 함수를 나타낸다.
optimal policy
-
어떤 Markov Decision Process에 대해서도 를 만족하는 optimal policy 가 존재한다.
그리고 이 policy는 optimal value function을 도출한다. -
optimal policy를 찾는 법은 optimal action value function에서 모든 action 들 중 가장 값을 최대로 만드는 action을 찾고 stochastic action 표현에서 그 action 에 대해서만 확률 1을 갖도록 만들면 되기 때문에 아래와 같이 표현가능하다.
Bellman optimality equation
-
optimal value function은 다음과 같이 표현될 수 있다.
위 식을 각각 다시 자신만을 사용해서 나타내면 아래와 같다
-
Bellman Optimality Equation은 max 함수 때문에 non-linear 하므로 iterative 한 방식으로 접근해야 한다.
