로봇
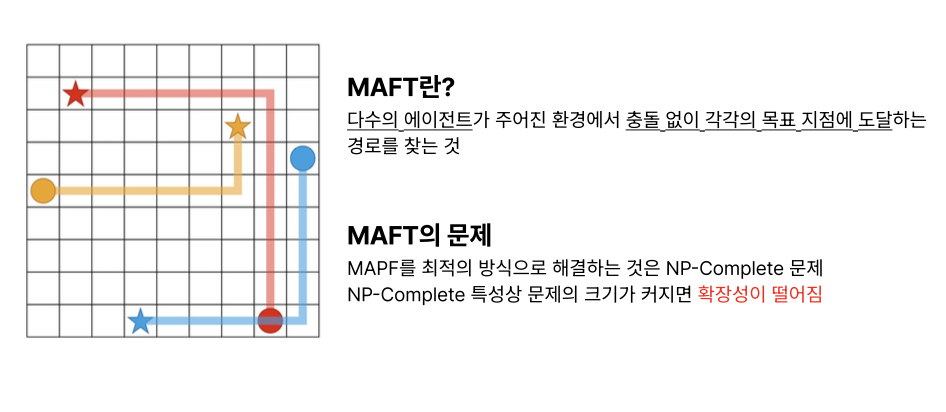
1.[Fleet Management] MAPF란?

우앙 다시 돌아왔다 ..! 로봇 개발 !!!방학 동안 해야 하는 부분을 열심히 하고 이제 다음 단계를 할 차례이다.이번 시리즈에서는 대강.. 아래와 같은 내용을 다룰 것이다.다중 로봇 경로계획 알고리즘 연구 터틀봇 3 활용 다중 로봇 실증 테스트 FMS 웹서버 (사
2.[ROS2] 언어 설정 및 ROS 개발 툴 설치
내 게시물은 좀 순서가 뒤죽박죽일 수 있다.저번에 안 한 언어 설정 및 ROS 개발 툴 설치를 진행하였다.나중에 하면서 더 필요한 건 설정하려고 한다.
3.[ROS2] turtlesim 패키지, rqt 설치 & 사용법 배우기
.. 사소한 거 하나씩 포스팅하려니 살짝 힘들군 !!!turtlesim이랑 rqt도 설치했는데 얘도 공식문서 보면서 했다....죄송하다.그냥 공식문서 보면 다 된다.난 내가 한 기록들 사진으로만 남겨두겠다...3개의 창 활성화
4.[ROS2] 환경 구성하기
이전 게시물에서 ROS2 Humble을 설치하였다.무작정 시작하기 전에 ROS2 환경을 준비해보려 한다.⚠️ 해당 게시물의 기준은 'Linux'입니다.ROS 2 명령에 액세스하려면 새 셸을 열 때마다 아래의 명령어를 실행해야 한다.새 셸을 열 때마다 설정 파일을 소싱할
5.[ROS2] ROS2 Humble 설치하기
🙇🏻 참고자료 https://velog.io/@irobou/ROS2-Humble-%EC%84%A4%EC%B9%98%EB%B0%A9%EB%B2%95
6.[ROS2] UTM에 Ubuntu 설치
저번 글에서는 Ubuntu랑 UTM 각각 설치만 하고 끝났었다.이제 UTM에 Ubuntu까지 설정해두려고 한다!저번 과정 그대로에서 이어서 설정을 하려고 한다.우선 'display output is not active' 이런 문구가 써있는 검은 화면이 나와도 당황하지
7.[ROS2] ROS2 사용을 위한 Ubuntu, UTM 설치
사용 노트북 환경 : MacBook Pro M3방학동안 ROS2 프로그래밍을 공부해야 할 일이 생겨 ROS2 관련 포스팅을 매일 해보려 한다.계절학기 수업으로 듣는 것이 있기 때문이다 !!!ROS2 Humble을 실행하기 위해 우선 필요한 Ubuntu와 가상 머신을 설
8.[Fleet Management] RHCR 코드 돌려보기

MAPF 문제를 해결하기 위해 사용하는 알고리즘이다.다수의 에이전트가 충돌하지 않고 목표 지점까지 이동하는 경로를 계획하는 문제를 풀기 위한 방법론을 나타내는 것이다.특히 대규모 창고나 물류센터에서 여러 로봇이 효율적으로 작업할 때 중요한 알고리즘이다.https
9.[논문 분석] 다중 에이전트 경로 찾기 문제를 위한 충돌 기반 탐색 알고리즘의 차선 버전들
(ECBS)Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding problem\-> 위의 논문을 분석해보았다.https://dudtlstm.notion