저번 게시물에서 우분투 설정은 모두 끝났었다.
이제 ROS2를 설치하면 되는 것이다.
나는 교수님께서 말씀해주신 ROS2 Humble 버전을 설치하려 한다.
교수님께서 주신 자료와 벨로그를 참고하였다!
ROS2 설치 및 실행: https://docs.ros.org/en/humble/Installation.html
위 링크 들어가면 영어라서.. 조금 읽다가 벨로그를 찾아보았다.
좋은 자료를 찾았고, 해당 글도 보면서 위의 공식문서로 다시 한 번 보았다.
나는 ROS2를 위한 환경을 모두 설정해둔 상태였다.
1️⃣ Ubuntu 22.04.4 LTS 버전 설치
2️⃣ 가상머신 UTM 설정 및 Ubuntu 설치
모두 잘 되어 있는지 확인한 후! 간단한 명령어들을 통해 ROS2 Humble을 설치하면 된다.
Setup
우선 UTM에 들어가 터미널을 실행한다.
1. Ubuntu Universe repository를 활성화하기 위한 명령어를 작성한다.
sudo apt install software-properties-common
sudo add-apt-repository universe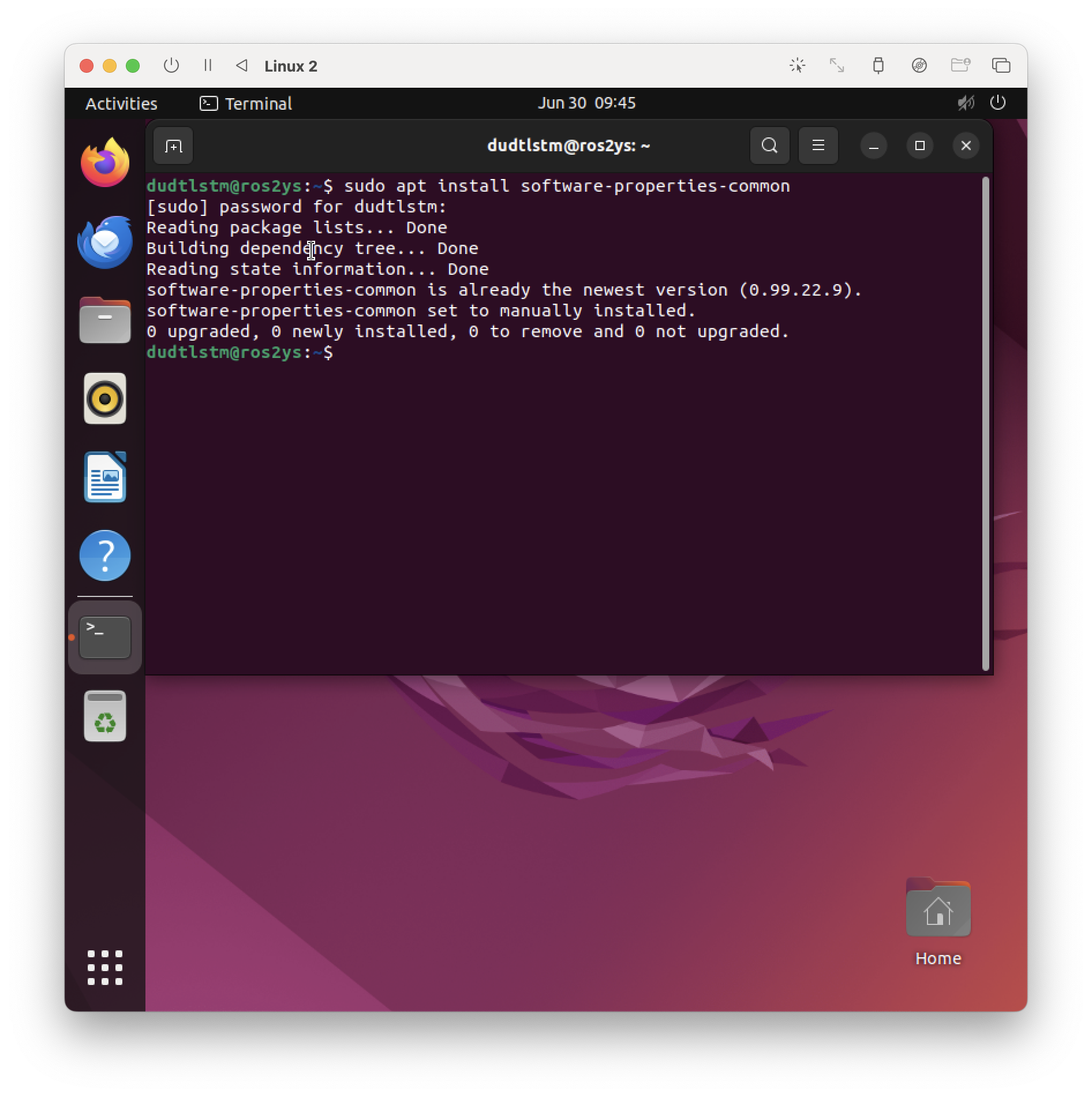
(캡처하다 말았다. 그냥 두 개 다 치면 된다.)
- apt를 통해 ROS2 GPG key를 설치한다.
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg- 소스 리스트에 ros repository를 추가한다.
저장소가 어디에 있는지 알려주는 역할을 하는 것이다.
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullROS2 설치
이제 Setup이 끝났고 본격적으로 ROS2를 설치하면 된다!
- apt repository chaches를 업데이트해준다.
sudo apt update- ROS2도 같이 업그레이드해준다.
sudo apt upgrade- 이제 ROS2를 설치한다!
ROS, RViz, demos, tutorial 등을 설치하는 명령어이다.
sudo apt install ros-humble-desktop- ROS-Base를 설치한다.
통신 라이브러리, 메시지 패키지, 명령줄 도구를 의미하며 GUI 도구는 없다.(?)
sudo apt install ros-humble-ros-base- ROS2로 package를 만들 때 필요한 툴을 설치한다.
sudo apt install ros-dev-tools이제 ROS2 환경을 터미널에 불러올 것이다!
source /opt/ros/humble/setup.bash위의 명령어로 가능하다.
ROS2 설치 확인
ROS2 설치가 잘 되었는지 테스트해보자!
2개의 터미널을 준비한다.
<첫번째 터미널> - talker
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talkertalker라는 노드를 실행하는 명령어인데.. 그냥 그렇구나 ~ 하고 일단은 넘어갔다.
이를 성공하면
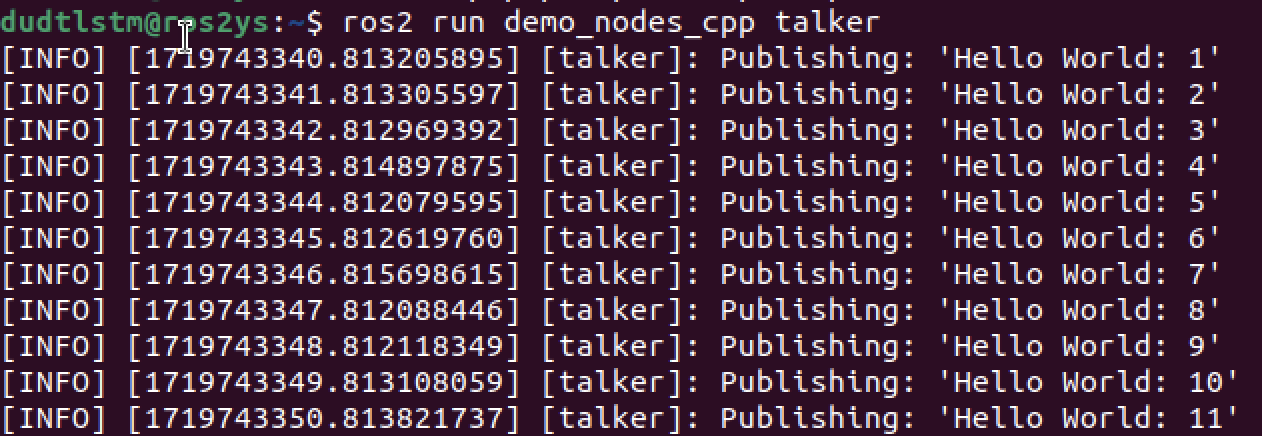
위와 같이 'Publishing'을 확인할 수 있다.
<두번째 터미널> - listener
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listenerlistener라는 노드를 실행하는 것이고 talker와 각각의 터미널에서 실행하면
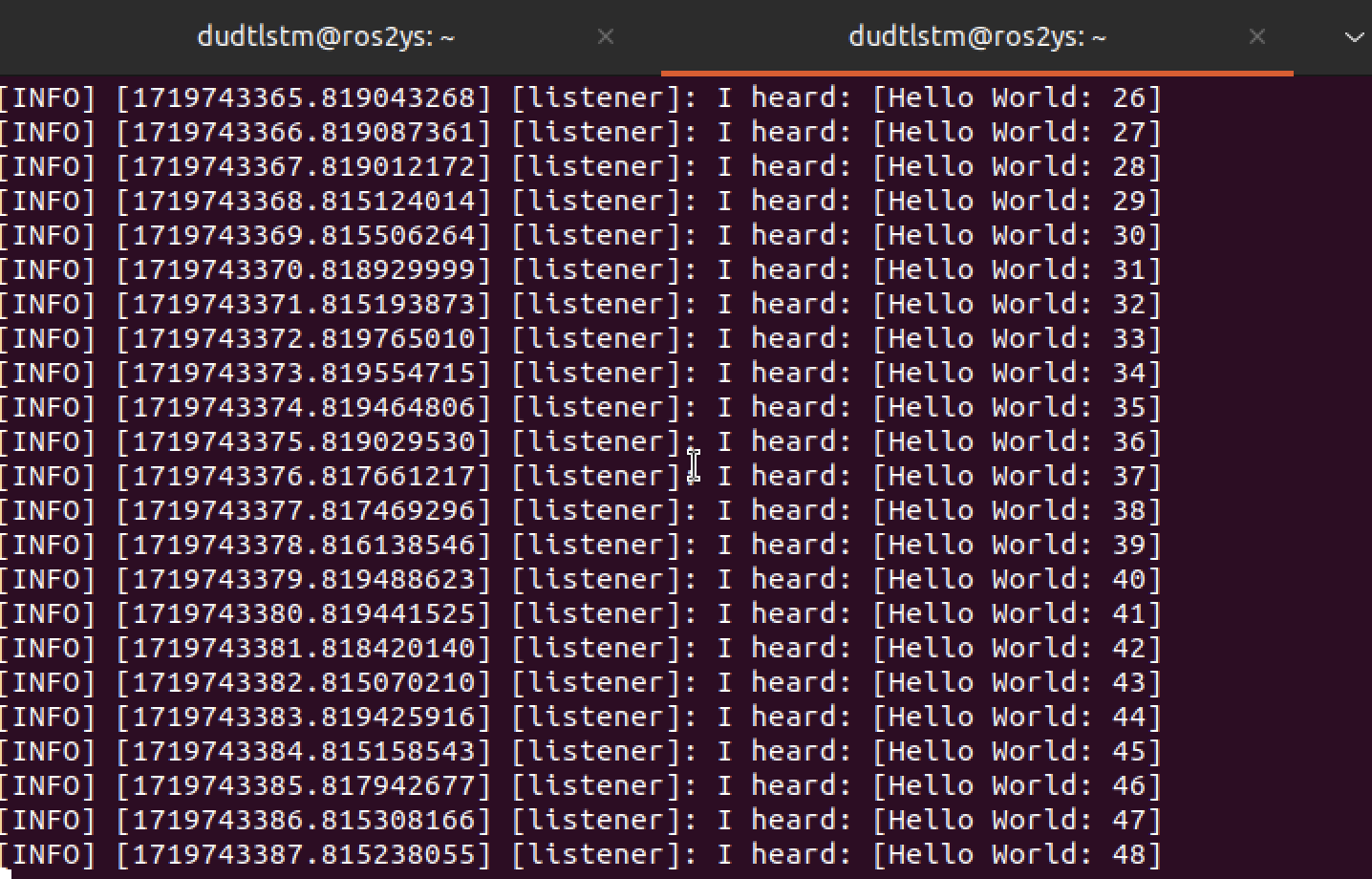
이렇게 'I heard'로 응답하는 것을 볼 수 있다.
난 첨에 둘이 따로 실행하고 같은 터미널에서 순차적으로 실행했다가 왜 안 되지? 했었다.
바보같은 짓을 한 것이다.
❗️각각 다른 터미널에서 동시에 실행해주면 된다!
이렇게 ROS2 Humble 버전 설치를 완료하였다.
다음부터 tutorial, 실습에 들어가자!
개발팅 🍀
🙇🏻 참고자료
https://velog.io/@i_robo_u/ROS2-Humble-%EC%84%A4%EC%B9%98%EB%B0%A9%EB%B2%95
