- 설치된 패키지 확인
$ ros2 pkg list- 특정 패키지 내에 포함된 노드 확인
$ ros2 pkg executables <패키지명>- 패키지의 노드 실행
각 노드별로 다른 터미널 창을 켜서 입력해야 한다.
$ ros2 run <패키지명> <노드명> - 현재 실행중인 노드/토픽/서비스 리스트 확인
$ ros2 node list$ ros2 topic list$ ros2 service list- 노드, 토픽의 그래픽 뷰
$ rqt_graph- 노드 정보
지정된 노드의 Publishers, Subscriber, Service, Aaction, Parameter 정보를 확인할 수 있다
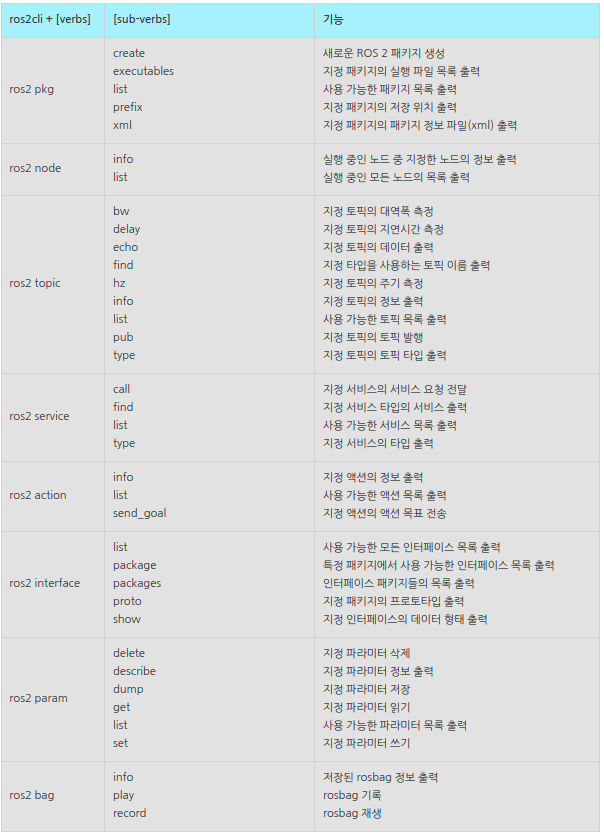
$ ros2 node info /<노드명>CLI 명령어
ros2 [verbs][sub-verbs] [options][arguments]
- launch
- 특정 패키지의 특정 런치파일 실행
- 런치 파일 : 실행해야하는 노드, 파라미터 등을 정의함. ROS1에서는 XML문서로 구성되어 있음.
- 특정 패키지의 특정 런치파일 실행
- run
- 특정 패키지의 특정 노드 실행
- action
- bag
- component
- daemon
- doctor
- extension_points
- extensions
- interface
- lifecycle
- multicast
- node
- param
- pkg
- security
- service
- topic
- wtf
정보 명령어
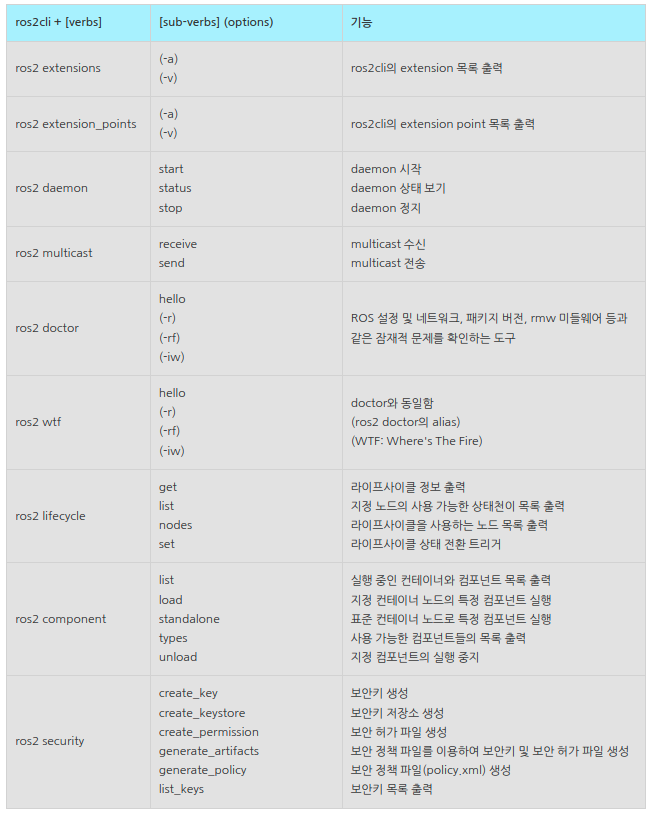
기능 보조 명령어
파일시스템
설치 방법
바이너리 설치
ex. $ sudo apt install ros-foxy-teleop-twist-joy
패키지 명으로만으로 설치 가능.
설치된 파일은 /opt/ros/foxy 에 저장되어 ros2 run 이나 ros2 launch로 해당 패키지내의 실행 가능한 노드를 실행시킬 수 있다.
소스코드 설치
ex.
$ git clone https://github.com/ros2/teleop_twist_joy.git
$ cd ~/robot_ws/
$ colcon build --symlink-install --packages-select teleop_twist_joy 패키지를 수정하여 사용하고자 할 경우나 소스 코드 내용을 확인할 필요가 있을 때
설치 폴더
기본 설치 폴더
'/opt/ros/[버전이름]' 폴더에 설치
ROS를 설치할 때 선택했던 패키지와 ROS 구동 프로그램이 포함됨
▪ /bin : 실행 가능한 바이너리 파일
▪ /cmake : 빌드 설정 파일
▪ /include : 헤더 파일
▪ /lib : 라이브러리 파일
▪ /opt : 기타 의존 패키지
▪ /share : 패키지의 빌드, 환경 설정 파일
▪ local_setup. : 환경 설정 파일
▪ setup. : 환경 설정 파일
사용자 작업 폴더
사용자가 원하는 곳에 생성할 수 있음.
사용자가 작성한 패키지와 공개된 다른 개발자의 패키지를 저장하고 빌드하는 공간
▪ /build : 빌드 설정 파일용 폴더
▪ /install msg, srv : 헤더 파일과 사용자 패키지 라이브러리, 실행 파일용 폴더
▪ /log : 빌드 로깅 파일용 폴더
▪ /src : 사용자 패키지용 폴더
- /src 내부
▪ /src C/C++ 코드용 폴더
▪ /include C/C++ 헤더 파일용 폴더 (폴더 안에는 각 패키지 이름별 폴더로 패키지별 헤더를 구분함)
▪ /param 파라미터 파일용 폴더
▪ /launch roslaunch에 사용되는 launch 파일용 폴더
▪ /패키지이름폴더 Python 코드용 폴더
▪ /test 테스트 코드 및 테스트 데이터용 폴더
▪ /msg 메시지 파일용 폴더
▪ /srv 서비스 파일용 폴더
▪ /action 액션 파일용 폴더
▪ /doc 문서용 폴더
▪ package.xml: 패키지 설정 파일 (REP-0140, REP-0149 참고)
▪ CMakeLists.txt: C/C++ 빌드 설정 파일
▪ setup.py: 파이썬 코드 환결 설정 파일
▪ README: 사용자 문서, github 리포지토리의 메인에 표시된다.
▪ CONTRIBUTING: 해당 패키지 개발에 공헌하는 방법을 기술하는 파일
▪ LICENSE: 이 패키지의 라이선스를 기술하는 파일
▪ CHANGELOG.rst: 이 패키지의 버전별 변경 사항 모음 파일 (REP-0132 참고)
빌드
빌드 시스템
: 단일 패키지 대상 (낮은 레벨, 의존성 낮음)
- ROS 1 (ROS Fuerte 까지): rosbuild (CMake)
- ROS 1 (ROS Groovy 이후): catkin (CMake)
- ROS 2: ament (CMake), Python setuptools (Full support)
- ament_cmake : ROS1의 catkin 업그레이드 버전. CMake의 빌드 설정 파일인 CMakeList.txt 기반으로 빌드
- CMake를 사용하지 않는 Python 패키지 관리도 가능
빌드 툴
: 전체 패키지 대상 (상위 레벨, 의존성 높음)
rosbuild, catkin_make, catkin_make_isolated, catkin_tools, ament_tools 그리고 현재 ROS 2 버전에서 널리 사용되고 있는 colcon이 있음
-
ament_tools
: ROS 2의 ament_cmake 및 ament_python, 순수 CMake 패키지를 모두 지원하는 툴로 catkin_make, catkin_make_isolated, catkin_tools 모두의 기능을 사용할 수 있으며 ROS 2 Bouncy 버전 이전까지 사용되었다. -
colcon
: ROS 1과 ROS 2 모두를 지원하기 위하여 통합된 빌드 툴로서 소개되었으며 ROS 2 Bouncy 이후 ROS 2의 기본 빌드 툴로 사용 중에 있다.
빌드 방법
- 소스 코드가 있는 workspace로 이동하고 colcon build 명령어로 전체를 빌드.
- 특정 패키지만 선택하여 빌드하고자 할 때에는
--packages-select옵션을 이용하고 symlink를 이용하려면--symlink-install옵션을 붙여줌.
$ cd ~/robot_ws && colcon build --symlink-install
$ cd ~/robot_ws && colcon build --symlink-install --packages-select [패키지 이름]
- Multiple workspace : ROS2에서는 복수의 독립된 워크스페이스를 사용할 수 있음
- No non-isolated build : 모든 패키지 별도로 빌드
- No devel space : 패키지를 빌드 한 후 설치해야 패키지를 사용할 수 있다.
colcon build --symlink-install와 같은 옵션을 사용하면 패키지 설치 없이도 패키지 사용할 수 있음.
빌드 시스템에 필요한 부가 기능
vcstool (버전 컨트롤 시스템 툴)
여러 리포지토리 작업을 보다 쉽게 관리할 수 있도록 설계됨.
ex)
$ wget https://raw.githubusercontent.com/ros2/ros2/foxy/ros2.repos
$ vcs import src < ros2.reposrosdep (의존성 관리 툴)
package.xml에 기술된 의존성 정보를 가지고 의존성 패키지들을 설치해 주는 역할.
ex)
$ sudo rosdep init
$ rosdep update
$ rosdep install --from-paths src --ignore-src --rosdistro foxy -y --skip-keys "console_bridge fastcdr fastrtps rti-connext-dds-5.3.1 urdfdom_headers"bloom (바이너리 패키지 관리 툴)
패키지 개발자가 개발한 패키지를 유지보수 및 관리하기 위한 툴이다.
패키지 파일 사용 방법
패키지 설정 파일
package.xml
패키지의 정보를 기술 (패키지 이름, 저작자, 라이선스, 의존성 패키지 등)
각 패키지당 무조건 1개의 패키지 설정 파일 (package.xml)을 포함
