[Photogrammetry] Some math basics often used in Photogrammetry
Photogrammetry (Cyrill Stachniss)
목록 보기
10/10
본 강의에서는
증명이나 자세한 설명을 하지 않고 photogrammetry에서 사용되는 수학적 성질들을 다룬다.
Topics
- 풀기
- SVD(특이값분해)를 이용하여 풀기
- Least squares with Gauss Newton
- Skew-symmetric matrix
- Derivative of rotation matrices
- Homogenous coordinates (다음 강의)
1
Linear Equation(일차방정식):
세 가지 경우가 존재한다
- 유일해 (A is square matrix(정방행렬), has full rank)
- 해가 없음 (overedetermined)
- 무수히 많은 해 (underdetermined)
Solving , w/ Exact Solution
유일해가 나올 조건
- A가 full rank를 갖는 정방행렬(square matrix)
- 식을 푸는 방법은 여러개 존재
Solving , overdetermined
- real-world situation에서 일반적
- 해가 없음
- 따라서 우리의 목표는 를 최소화 하는 것:
=
- 최소제곱법(least squares) 사용
- 해(solution)은 다음과 같은 식을 통해 얻어짐
Solving , underdetermined
- 무수히 많은 해 존재
- 충분히 많은 정보가 없는 것
접근법: 의 해가 되고 를 최소화하는 를 찾는 것
- 해는 다음과 같음
2
Homogeneous System(동차선형시스템)
- 을 만족시키는 가 0이 아닌 해를 찾는 것
- system이 underdetermined (무수히 많은 해 존재)라는 뜻
- 라고 불리는 의 null space가 존재하고,
모든 는 를 만족한다. - 의 rank deficiency(차원 부족)은 null space의 dimemsionality(차원)을 정의한다.
ex. A가 5x5 matrix인 경우, rank(A)=3이라면 null(A)=2라는 뜻
Eigenvalues(고윳값)
- 정방행렬에 대해서
Q. 이것이 A의 eigenvalues(고윳값)에 미치는 영향이 무엇일까...?
: 는 고윳값들 중 값이 0이 아닌 개수
: 는 고윳값들 중 값이 0인 개수를 의미한다.
Eigenvector (고유벡터)
- 각각의 eigenvector인 는 성립함
- 따라서 고윳값이 0일 경우에는
고유값 0에 대응되는 모든 고유벡터들은
Eigenvector & Singular Vectors(특이벡터)
- A가 정방행렬(square), 실수행렬(real), 대칭행렬(symmetric)이고 + 음수가 아닌 고윳값을 가진다면, 고윳값은
singular value(특이값)이라고 할 수 있다. - singular vectors and values (특이벡터와 특이값)은 또한 정방행렬이 아닐 때도 존재할 수 있음
- singular vectors and values (특이벡터와 특이값)을 계산하기 위해
SVD사용
3
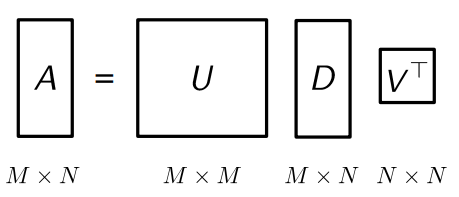
SVD(Singular Value Decomposition)
- SVD는 행렬 A를 다음과 같이 쪼갠다
Singular Values
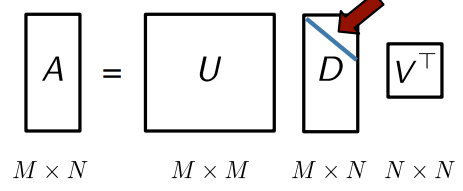
- 는 singular value(특이값)을 큰 것부터 작은 것 순으로 정렬한 대각행렬
- 는 orthogonal matrix(직교행렬)
Singular Vectors
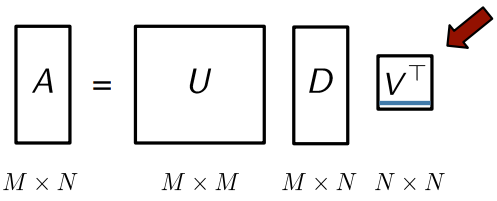
- 는 singular value(특이값)에 대응되는 singular vectors(특이벡터)를 갖고 있음
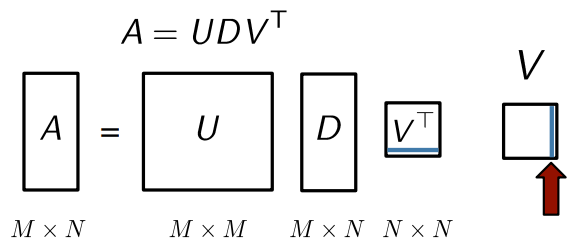
- 코딩할 때 대부분의 libraries는 가 아니라 를 반환하기 때문에 주의하기
- 의 마지막 열은 가장 작은 특이값에 대응하는 특이벡터를 나타냄
Solution to via SVD
-
SVD를 이용해서 A를 분해함 :
-
D에 있는 가장 작은 특이값이 0인지 확인:
-
그렇다면, V의 마지막 열은 자명하지 않은 해(non-trivial solution)이다.
자명하지 않은 해(non-trivial solution)
: 에서 가 0이 아닌 해 (우리가 관심있음) -
그렇지 않다면, 자명하지 않은 해(non-trivial solution)가 존재하지 않음 (오직 자명해만 존재)
-
그러나, V의 마지막 열은 보다 작다는 제약 아래, 를 최소화할 수 있는 벡터를 나타냄
4
Least Squares (최소제곱법)
Graphical Explanation
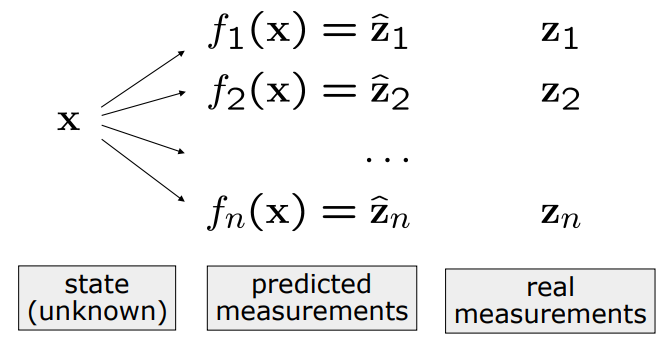
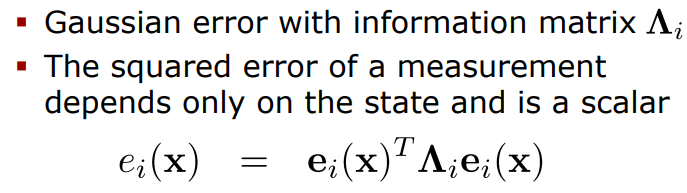
Error Function
- error 는 predicted와 actual 사이의 차이

- 우리는 error가 평균이 0이고 정규분포를 따른다고 가정

정리된 글은 https://dusruddl2.tistory.com/로 이동