Photogrammetry (Cyrill Stachniss)
1.[Photogrammetry] 8-1. Visual Features Part2: Descriptors (SIFT, BRIEF, ORB)
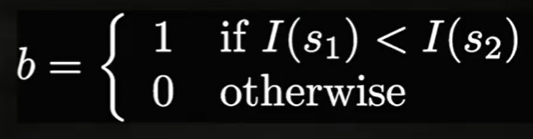
5 minutes with Cyrill (https://www.youtube.com/watch?v=25GkgxClSaU&list=PLgnQpQtFTOGRYjqjdZxTEQPZuFHQa7O7Y&index=14)
2.[Photogrammetry] 8-2. Segmentation Using Mean Shift

이 사진에서 어떻게 비슷한 지역들을 인식할 수 있을까....?=> 즉 어떻게 group similar things할 수 있을까....!여기서 제안되는 것은 바로 clustering이다.clustering: 어떤 데이터들이 주어졌을 때, 그 데이터들을 비슷한 특성을 가
3.[Photogrammetry] 7-1. Image Template Matching using Cross Correlation
다음 사진과 같이 같은 배경을 찍은 서로 다른 두 사진이 있을 때 각각의 일치하는 부분을 매칭하는 과정을 설명하고 있다.Image Alignment: 같은 scene을 찍고 있지만, 다른 condition에서 찍은 사진들을 겹치는 과정 일치하는 부분을 매칭시키면 두
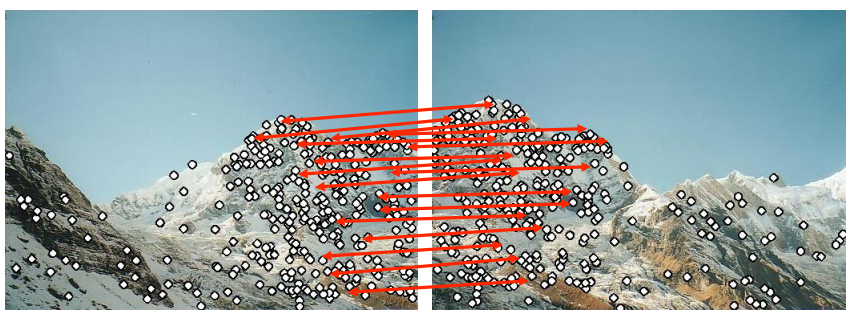
4.[Photogrammetry] 7-2. Visual Feature Part1: Computing Keypoints
참조영상SIFT(Scale Invariant Feature Transform): 이미지의 크기나 회전에 불변하는 특징을 추출하는 알고리즘: 서로 다른 두 이미지에서 SIFT 특징을 각각 추출한 다음에 서로 가장 비슷한 특징끼리 매칭해주면 두 이미지에서 대응되는 부분을
5.[Photogrammetry] 9-2. Ensemble Classification - Bagging & Boosting

$K$개의 classes, 그리고 features $e$다음과 같은 식을 만족하는 function $f$를 찾는 것이 바로 classification이다.즉, feature을 입력하면 class가 나오는 함수!Ensemble method의 가장 큰 핵심은multiple
6.[Photogrammetry] 9-1. Introduction to Neural Networks - Part 1: The Basics
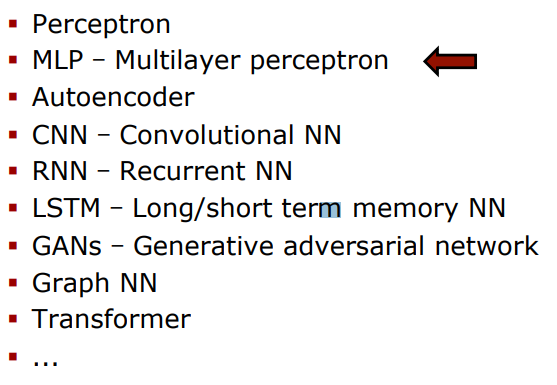
Neural Network NN에 대한 기본지식을 간단히 정리하고 시작하기 > 머신러닝 기술 중 하난인 NN은 주로 다음 사진과 같이 image classification이나 semantic segmentation을 할 때 사용한다. >처음 아이디어는 1950-60년
7.[Photogrammetry] 12-1 Camera Parameters - Extrinsics and Intrinsics
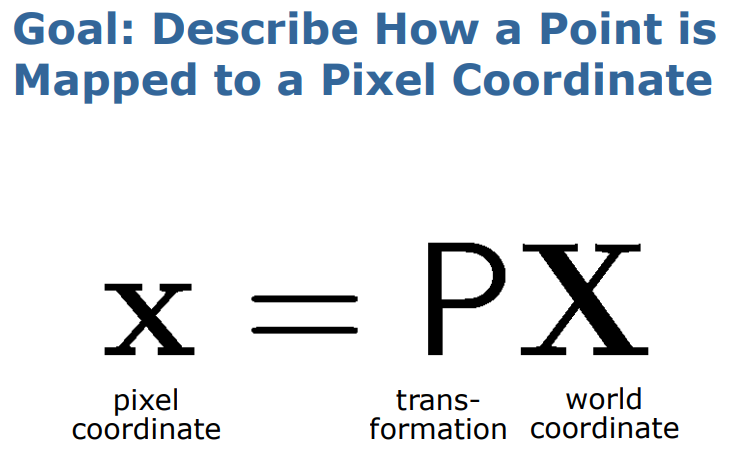
world coordinate는 3d, pixel coordinate는 2d어떻게 3d->2d로 변환할지 알아보기 좌측 위에 있는 index에 따라서 이게 어떤 좌표계(coordinate system)인지 알 수 있다. index를 읽을 때,from 오른쪽아래 ind
8.[Photogrammetry] Camera Calibration 혼자 정리해보기
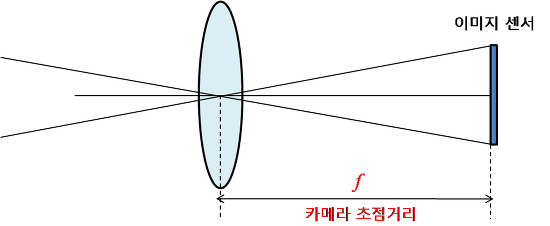
다음 블로그를 참고하여 정리하였다. . . . Camera Calibration 개념 실제 세계는 3D이지만, 사진에서는 2D로 표현된다. 이때 3D 상의 점들이 2D에서는 어디에 대응되는지 기하학적으로 생각하면, 영상을 찍을 때의 카메라의 위치, 카메라의 방향
9.칼럼 작성
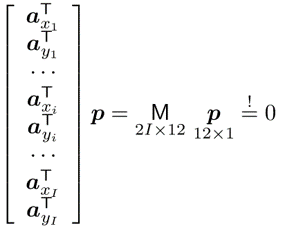
참고한 블로그https://junsk1016.github.io/opencv/DLT/https://darkpgmr.tistory.com/108...$Mp = 0$행렬 $M$이 정방행렬인 경우,$det(M)!=0$ 인 경우,$p$를 어떻게 구하는가새롭게
10.[Photogrammetry] Some math basics often used in Photogrammetry

본 강의에서는 증명이나 자세한 설명을 하지 않고 photogrammetry에서 사용되는 수학적 성질들을 다룬다. Topics $Ax = b$ 풀기 SVD(특이값분해)를 이용하여 $Ax = 0$ 풀기 Least squares with Gauss Newton Skew-s