4. Generalized inequalities
이번에는 차원 벡터의 크기를 비교하기 위한 generalized inequality에 대해 알아보자.
cone 이 다음 성질들을 만족하면 proper cone이라고 부른다.
- k is convex.
- k is closed. (경계를 포함하는 집합)
- k is solid. (interior is not empty)
- k is pointed (직선을 포함하지 않는다.)
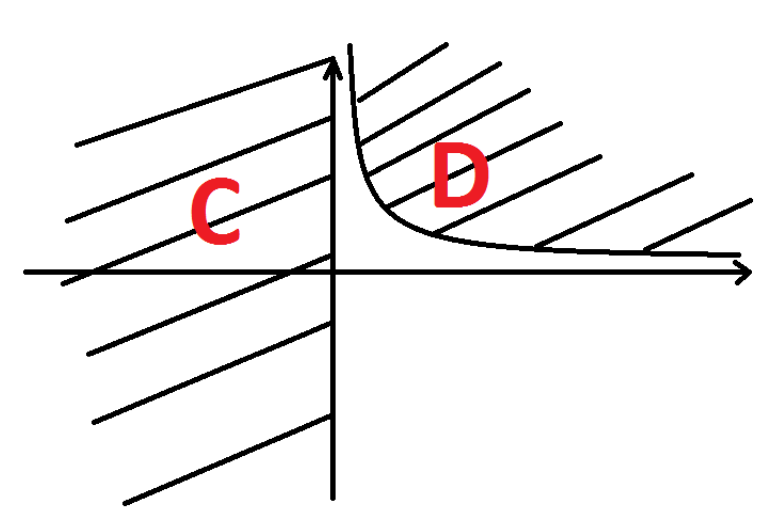
*3에 대한 설명: 다음 두 집합을 살펴보자.
다음 두 집합은 모두 closed convex cone이다. 그러나 만 solid하다. 왜냐하면 의 모든 점은 모두 의 경계면에 위치해 있고, 따라서 interior가 없다.
이 proper cone은 generalized inequality를 정의할 때 사용된다. 상의 점 에 대하여 generalized inequality는 다음과 같의 정의된다.
만약 일 경우 generalized inequality와 에서의 inequality 는 같다.
여기에 대해서 성립하는 몇 가지 성질들은 다음과 같다.
- preserved under addition: if and , then .
- transitive: if and then .
- preserved under nonnegative scaling: if and then
. - reflexive: .
- antisymmetric: if and , then .
- preserved under limits: if for and
as , then .
등호가 없는 경우에는 아래와 같다.
- if then .
- if and , then .
- if and then .
- .
- if and for small enough,
generalized inequality의 성질은 와 비슷하지만 다른 점이 있다. 가령 는 linear ordering으로, 임의의 두 원소에 대하여 항상 inequality를 정의할 수 있지만 이것이 성립하지 않을 수 있다. 여기서 maximum과 minimum의 개념이 기존보다 조금 복잡해진다.
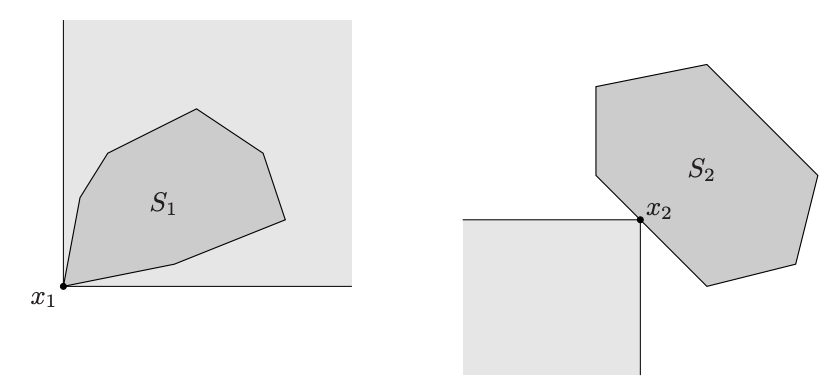
어떤 집합 의 원소 가 모든 다른 원소 에 대해 를 만족하면 이 는 의 minimum이라고 부른다. 따라서 는 다른 원소들과 비교 가능하며 같거나 크다. 수식으로 표현하면 다음과 같다.
비슷한 개념으로 minimal이 있는데, 어떤 집합 S의 원소 에 대해 인 경우는 인 경우 뿐이다. nothing is smaller라고 표현하면 적합할 것 같다. 수식으로 표현하면 다음과 같다.
가령 아래 그림에서 은 에서 정의된 inequality에 대하여 minimum, 는 minimal point이다.
또다른 예로, ordering 에서 은 minimum element이다. 만약, 부터 시작하는 자연수에 ‘나눌 수 있음’으로 순서를 부여했다고 해 보자. 따라서 는 로 를 나눌 수 있다는 것이다. 그러면 minimal elements는 소수가 된다. 그렇지만 minimum은 아니다.
5. separating and supporting hyperplanes
다음 두 theorem은 상에서 convex set의 위치를 정확하게 정한다는 의의를 지니고 있다.
Separating hyperplane theorem
어떤 두 convex set 와 가 disjoint일 때, 그 두 집합은 어떤 hyperplane 로 구분될 수 있다. 즉 하나는 한쪽 halfspace, 다른 것은 반대쪽에 속한다. (역은 성립하지 않을 수 있다.) 머신러닝의 관점에서, 어떤 데이터가 convex하게 분포되어 있으면 linearly seperable하다.
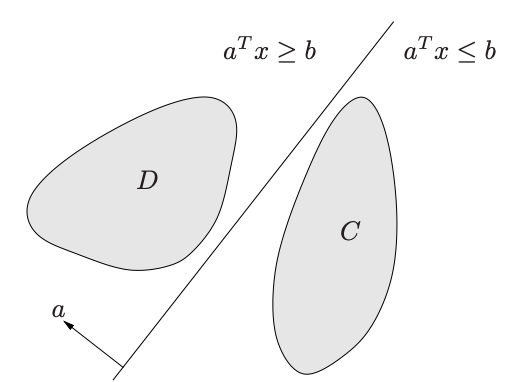
이때 등호가 없는 separation이 성립할 수도 있는데, (i.e. C in , D in ) 밑의 그림처럼 항상 가능하지는 않다.
그렇지만 중요한 건 결국 등호가 없는 경우의 strict한 separation이다. 이 경우는 아래와 같다.
Let and be closed convex sets in with at least one of them bounded, and assume that Then
and
Proof.
두 convex set의 거리를
와 같이 정의하자.
와 를 이 infimum에 해당하는 점이라고 하자. 그 다음,
위와 같이 seperating hyperplane의 파라메터를 정의하자. 그러면 우리의 주장(claim)은
가 된다.
를 이렇게 선택한 이유는 아래에서 볼 수 있듯 hyperplane이 사이를 반 가르게 선택하기 위해서이다.
이제 모든 에 대해임을 증명하면 반대의 경우는 대칭적이므로 증명이 끝난다.
모순을 이끌어내기 위해, 인 가 존재한다고 가정하자. 그러면
이어야 한다.
이제 를 정의하자. 그러면 는 로부터 에 대해 descent direction이 된다. 정확한 수식적 유도는 아래와 같다.
이 때 첫 번째 부등식은 로부터 나왔고, 두 번째 부등식은 로부터 알 수 있다.
따라서 다음 사실이 성립한다.
하지만 이것은 가 와 가장 가까운 점이라는 사실에 모순이므로 우리가 가정한 는 존재하지 않는다.
중요한 따름정리는 다음과 같다.
Let be a closed convex set and . Then there exists a hyperplane that strictly separates from .
여기에서 Farkas’ Lemma라는 매우 중요한 정리가 나오고, 이 보조정리에서 LP strong duality 성질이 유도되는 구조이다. 이 내용은 나중에 다루도록 하자.
Supporting hyperplane theorem
어떤 집합이 supporting hyperplane을 갖는다는 것은 그 집합이 hyperplane을 통해 분리된 halfspace 중 하나에 온전히 속하며, hyperplane과 접하는 경계점이 적어도 하나 존재한다는 것이다.
구체적으로, 집합 의 경계점 와 에 대해 를 만족하면 hyperplane 를 의 supporting hyperplane이라 한다.

따라서 halfspace (normal vector의 반대쪽)이 집합을 포함하게 된다.
convex set의 경우 경계면의 점 와 접하는 supporting hyperplane이 적어도 하나 존재한다.

반대로, 만약 가 interior를 가지는 closed nonempty set이고 모든 경계면의 점이 그 점을 포함하는 supporting hyperplane을 가질 경우, 는 convex set이며 모든 supporting hyperplane의 교집합 역시 convex set이다.
결국 이것은 임의의 convex set의 공간상의 위치를 supporting hyperplane이 이루는 halfspace의 교집합으로 정확히 나타낼 수 있다는 말이므로, 두 hyperplane theorem은 궁극적으로 같은 뜻이다.
6. Dual cones and generalized inequalities
쌍대공간(Dual space)는 어떤 벡터공간 에서 정의된 모든 linear form, 즉 스칼라로 맵핑되는 선형함수를 모은 공간이다. 우리 세션에서는 자세한 수학적 논의는 하지 않고 교재에 소개된 내용만 살펴보았다.
Dual cones
Cone 의 dual cone 는 다음과 같이 정의된다.
이름 그대로 는 cone이며, 원래 에 상관없이 항상 convex set이다. 기하적으로, 는 가 의 원점에서의 supporting hyperplane의 normal vector임과 동치이다.

(사실 위 그림처럼, dual cone은 원래 set이 cone이 아니어도 cone이다.)
예시로, positive semidefinite cone 은 자기가 자기 자신의 dual cone인 self-dual이다. 따라서 square matrix 에 대하여
임이 성립한다. 이 사실을 증명해 보자. 만일 라면, 인 가 존재하고 따라서 positive semidefinite인 에 대한 반례가 생겨 는 의 dual cone에 속하지 않는다. 반대로 라면 positive semidefinite인 의 eigen decomposition 를 정의했을 때 모든 eigenvalue가 보다 크거나 같으므로 이다. 따라서 이다.
만일 원래의 cone 가 proper cone이면 dual cone도 proper cone이며, 이다. 즉 dual cone 상에서도 inequality를 정의할 수 있는데, 다음 문단에서 살펴보자.
Dual generalized inequalities
방금 말했듯 원래 cone이 proper cone이면 dual cone에서도 inequality가 정의되는데, 둘은 상호작용하는 성질이 있다. 아래 두 개는 매우 중요한 성질이며, 와 를 서로 바꿔도 동일하게 성립한다.
- .
이 성질을 통해 dual cone을 이용하면 기존의 벡터에 대한 inequality를 스칼라에 대한 inequality로 훨씬 간단하게 표현할 수 있음을 알 수 있다.
Minimum and minimal elements via dual inequalities
이제 마지막이자 섹션 6의 의의가 되는 부분으로, 상의 set의 minimum / minimal element를 dual inequality를 이용해 표현해 보자.
proper cone 에서 정의된 generalized inequality 기준, 집합 의 minimum element의 정의는 다음과 같이 dual cone을 이용하여 표현할 수 있다.
is the minimum element of , with respect to the generalized inequality , if and only if for all , is the unique minimizer of over .
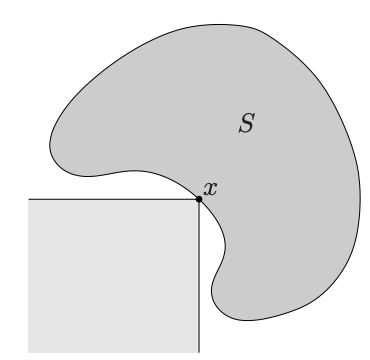
기하적으로 이는 아래 그림처럼 의 supporting hyperplane 이 를 유일한 접점으로 가짐을 말한다.
이제 miminal element에 대해 살펴보자. 의 minimal element는 다음과 같이 표현할 수 있다.
If and minimizes over , then is minimal.
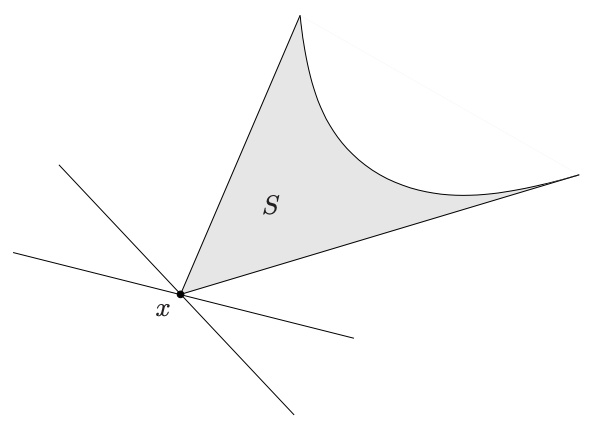
이 정의에는 미묘한 점이 있다. 먼저 이 명제는 양방향이 아님에 주의하자. 아래 그림에서 는 의 상의 minimal element지만, 접선을 그을 수 있는 적절한 을 찾을 수 없다.
반대 방향은 가 convex set일 때 제한적으로 성립한다. 만일 가 convex set이고 가 minimal element라면, 는 임의의 에 대해 의 minimizer이다. (다만 에 대해서는 성립하지 않을 수 있다.) 따라서 convexity 조건이 있어야만 벡터 최적화 문제를 이 방식으로 풀 때 가능한 전체 해를 탐색할 수 있다.
아래 그림은 이런 벡터 최적화 문제의 적용 예시이다. 연료와 노동력을 투입해 최대 효율을 달성하고 싶을 때, 같은 생산량을 도출하는 자원 벡터들의 다양한 조합(생산 방법)은 와 같다. 우리의 목표는 의 minimal element인, 가장 자원을 적게 소모하는 조합 벡터를 찾는 것이고 이 기준은 componentwise inequality이다. 가령 라는 것은 두 벡터의 각 원소 모두에 대해 각각 라는 뜻이다. 이때 minimal element, 즉 더 개선할 필요가 없는 상태를 pareto optimal이라고 한다. 이때 을 각각의 자원 투입에 대한 비용(cost)으로 생각해 를 최소화하는 문제로 표현하는 것은 이 문제를 푸는 효과적인 접근 방식이다.
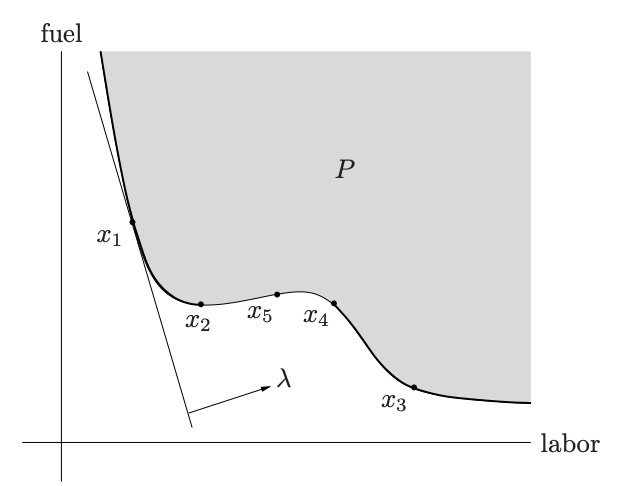
위 그림에서 는 둘다 에 밀리므로 효율적인 솔루션이 아니다. 은 의 최소화 문제를 통해 찾을 수 있는 솔루션이다. 반면 는 minimal element이지만 이 방법으로 찾을 수 없다.
