목적
full column matrix가 있다고 가정하자.
예를 들어 10X3이라고 하자
Ax의 의미가 기하학적으로 A의 column vector들로 span한 Vector space라고 배웠다.
그렇다면 Ax=b의 의미는 Ax라는 subspace에 b가 있느냐 라고 묻는 문제로 재정의할 수 있다.
A[10X3]은 10차원 공간에 있는 3개의 vector로 만든 vector space이다.
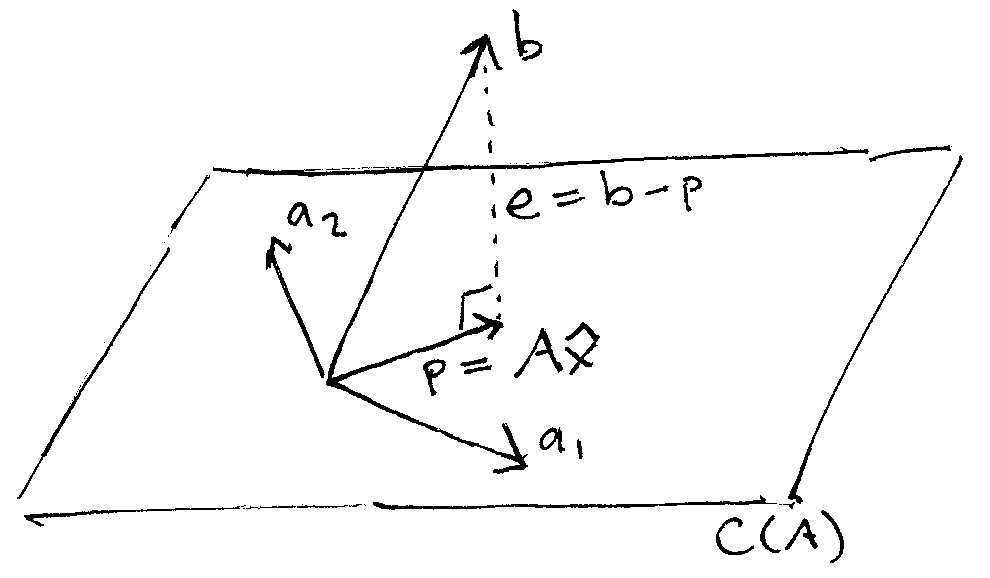
그림은 인간은 3차원밖에 이해할 수 없기 때문에 3차원 공간에 있는 2차원스럽게 이해해보자.
그런데 10차원 공간이라면 A가 만들 수 있는 벡터 공간위에 없을 수도 있다. 위 그림으로 이해하면 C(A) 평면 저 너머에 b가 있는 것이다.
우리는 A를 가지고는 b를 정확하게 표현할 수 없다. 우리가 가진 차원은 3차원이지만 실제 데이터는 10차원에 존재하기 때문이다.
그러면 아예 포기하냐? ㄴㄴ 최소자승법의 목적은 우리가 가진 공간으로 저 b를 최대한 가깝게 표현하자는 것이다. 이것이 바로 최소자승법의 원리이다.
c(A)에 에 나타낼수 있는 모든 벡터중에 b를 가장 잘 대변할 수 있는 벡터는 무엇일까? 바로 C(A)위로 정사영한 벡터이다.
그러므로 최소 자승법과 projection Matrix는 정사영 개념을 이용해 유도한다.
유도
어떤 점과 평면의 거리는 그 점에서 평면에 수직으로 내린 선분의 길이로 구한다.
C(A)의 임의의 벡터 가 있다 가정하자.
와 의 뺄셈으로 vector 를 정의할 수 있다.
최소자승법은 의 최소화 하는 것이 목표이다.
우리가 찾는 것은 평면 위에 수직으로 내린 선분이므로 (그래야 최소이므로)
으로 전개할 수 있고 이를 유도하면

이다. 그런데 우리는 인 trivial한 해를 구하는 것이 아니기 때문에

을 풀어야 한다.
식을 전개하고 양변에 transpose를 취한다.

이때 를 Projection Matrix라고 부른다
우리가 아까 full-column rank라고 가정했고 는 (3X3) matrix이므로 는 역행렬이 존재한다. ( 증명은 Appendix 참고)
는 vector space에서 임의의 vector을 만들기 위한 coefficient를 묶은 것이다.
그러므로 벡터 b를 col(A)에 정사영한 vector는 이다.
정리
- Projection Matrix:
만약 A가 coulumn full rank가 아니라면 Pseudo inverse를 구해서 전개한다.
활용
신호처리 관점에서의 이해
신호처리 뿐만 아니라 과학에서 제일 중요한 것은 함수찾기다..
즉 x라는 input과 y라는 output이 있을 때 Ax=y 일때 대응관계 A를 찾는 것이다(A를 법칙이라고도 부를 수 있다.)
그런데 신호처리를 공부하면 알고 있겠지만 신호에는 잡음이 끼게 된다.
이때 를 라고 부른다.
우리는 Z를 보고 x를 구할 수 있어야 하는데 noise n때문에 정확하게 표현할 수 없다. 이때 최소자승법을 col(A) 공간 위로의 정사영을 계산해 근사한다.
포물선 근사
관측된 데이터 를 포물선 로 근사할 경우에는 다음과 같은 식을 세울 수 있다.
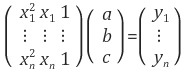
포물선 이상의 3차, 4차, ... n차 함수로 근사할 경우에도 마찬가지이다. 이와 같이 식을 세운 후 matlab 등의 툴로 pseudo inverse 계산을 해 주면 바로 답을 얻을 수 있다.
한계
최소자승법은 데이터 중에 보통 outlier(정상적인 데이터 분포에서 동떨어진 데이터)라고 불리는 이상한 놈이 하나라도 끼어 있으면 적용하기 힘든 방법이다.
그 이유는 최소자승법은 전체 데이터의 합을 최소화하기 때문에 outlier의 residual도 같이 줄이려고 하다보면 전혀 엉뚱한(잘못된) 근사 결과를 낼 수 있기 때문이다. 따라서, outlier가 존재하는 경우에는 RANSAC, LMedS, M-estimator 등과 같은 robust한 파라미터 추정 방법을 사용해야 한다.
Appendix
증명
Let where N(A) is the null space of A and x is matrix
so,
Hence
Let
(this is inner product notation)
Hence
Therefore
참고
https://www.youtube.com/watch?v=B_WZdmCGqBc
https://darkpgmr.tistory.com/56
