구배 (Gradient)
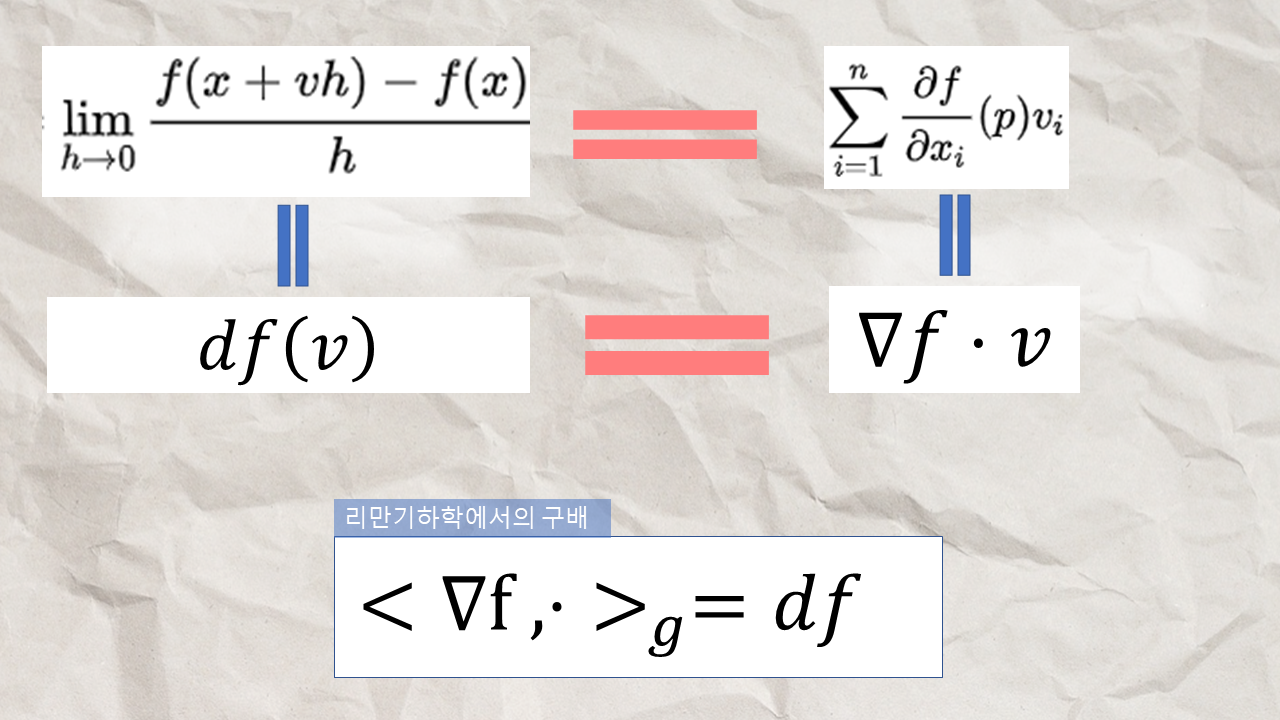
기초적인 미분적분학에서, 유클리드 공간 Rn에서 정의된 함수 f:Rn→R을 다루는 맥락에서, 우리는 gradient(기울기)를 다음과 같이 정의한다.
함수 f가 Rn에서 정의된 스칼라 함수일 때, 그 기울기(gradient)는 벡터 미분 연산자로 정의된다. 구체적으로, f의 기울기 ∇f는 f의 각 변수에 대한 편미분으로 이루어진 벡터로 주어진다:
∇f=⎝⎜⎜⎜⎜⎜⎛∂x1∂f∂x2∂f⋮∂xn∂f⎠⎟⎟⎟⎟⎟⎞
여기서 ∂xi∂f는 f를 xi에 대해 편미분한 값을 의미하며, 이 벡터는 함수 f의 변화율을 나타낸다. 즉, ∇f는 함수 f가 특정 지점에서 가장 빠르게 증가하는 방향과 그 크기를 나타낸다.
이와 같이 정의된 gradient는 Rn에 정의된 Vector field의 가장 유명한 예시이다.
독자 헷갈리게 만들기
잘 관찰해보면, 편미분 ∂xi∂f들은 마치 ∇f의 component처럼 보인다. 그리고 df=∂x1∂fdx1+⋯+∂xn∂fdxn이므로, 또한, ∂xi∂f들은 df의 component인 것으로 보인다.
헷갈리지 않기 위해서는 정의를 살펴보아야 한다.
사실, 미분기하의 언어에서는 ∂xi∂f은 df의 component로서 기능하지만 (일반적으로는) ∇f의 component로 작용하지 않는다. 이게 무슨말이냐면, 우리가 흔히 보는 ∇f에서 ∂xi∂f가 마치 component처럼 적히는 그 수식은 Tangent vector들들이 정규직교하기 때문에 나오는 결과이지, ∇f의 정의가 결코 아니라는 입장을 (미분기하학 언어가) 주장하고 있다는 것이다. 다만, df의 component는 언제나 ∂xi∂f이라 볼 수 있다. 다시말해서,
df=∂x1∂fdx1+⋯+∂xn∂fdxn
이다.
예를들어서
아래와 극좌표변환 x=rcosθ,y=rsinθ을 생각하자. 단, θ∈[−π,π)
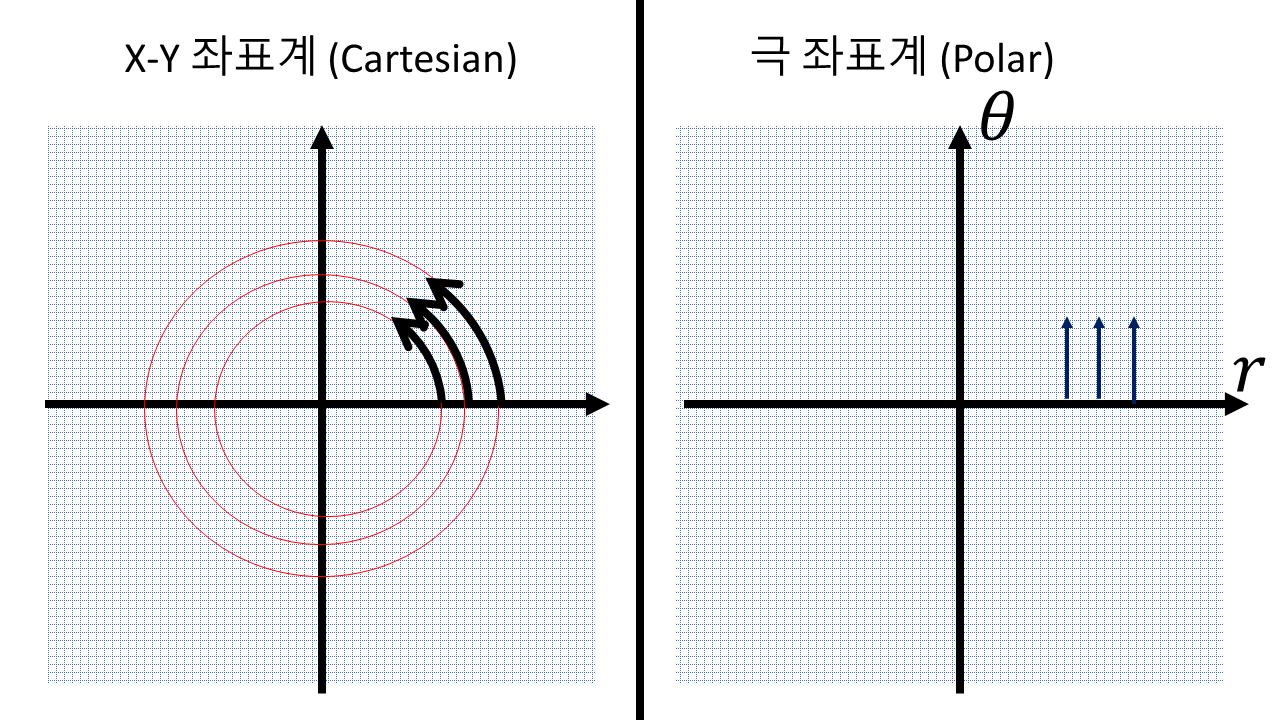
- 중심에서 가까운 원의 반지름이 작은 경우, 동일한 각도 변화에 해당하는 아크 길이 변화는 작다.
- 반면, 중심에서 멀어질수록, 동일한 각도 변화에 해당하는 아크 길이가 변화가 커지게 된다.
독자를 매우 헷갈리게 해보자
사실, 위 그림에 있는 3쌍의 화살표를 서로 동일한 것으로 간주하고 싶기 때문에, 우리는, 극 좌표 평면 (r,θ 표현에서) 그린 화살표의 크기를 보이는 것과 다르게 왜곡시켜서 정의한다. 그런 이유로, 극좌표계로 표현한 점 (r,θ)에서 출발하여 θ 방향으로 1만큼 변화함을 나타내는 화살표를 θ^라 적을때, 이 화살표의 크기는 단순히 r이다. 마찬가지로, r^을 정의 할 수 있는데, 이 화살표는 X-Y평면으로 옮겨도 크기 왜곡이 없으므로, r^의 크기는 1이다. 이러한 생각은 우리가 극좌표변환하여 적분할때하는 흔히 보는 미분형식 표현 rdrdθ=dxdy에 고스란히 드러난다.
즉, θ^의 크기가 항상 1이 아니므로, r^,θ^은 직교하지만 정규직교하지 않는다.
다시 본론으로 돌아가서
우리가 헷갈리지 않도록 차근차근 살펴보자. 먼저, 함수 f(x,y)=x2에 대해 생각해보자. 이 함수를 극좌표계 (r,θ)로 변환하면, 다음과 같은 관계를 이용할 수 있다:
x=rcosθ,y=rsinθ
이때 f(x,y)는 다음과 같이 표현된다:
f(r,θ)=(rcosθ)2=r2cos2θ
이제, df를 구해보자. 미분기하에서 df는 함수 f의 미분 형식으로, 이는 f의 각 변수에 대한 변화율을 표현하는데, 다음과 같은 꼴로 쓸 수 있다:
df=∂r∂fdr+∂θ∂fdθ
반면 잘 알려진 공식으로 ∇f를 구하면, 다음과 같이 구해진다.
∇f=(∂r∂fr21∂θ∂f)=(2rcos2θ−2cosθsinθ)
∇f=(∂r∂f∂θ∂f)가 아니다. 즉, 편미분들은 Gradient의 component를 의미하지 않는다.
설득의 시간
미적분학에서 우리는 함수의 변화율을 나타내기 위해 gradient ∇f와 미분 형식 df를 사용한다. 이 두 개념은 수학적으로 깊이 연결되어 있으며, 서로 쌍대적인 관계에 있다. 이 쌍대성을 이해하는 것은, 특히 미분기하학에서 중요한데, 그 이유를 이해하기 위해 우리는 미적분학 수준에서도 이 관계를 명확히 해야 한다.
미분기하학 언어에 따르면, 정의상 df와 ∇f의 쌍대성은 자명하다. 그러니까, 미분기하학 언어에서 왜 그렇게 ∇f를 정의하는가를 이해하며 공부하기 위해서, (미적분학 수준에서) 쌍대성을 이해하고 있는것이 요구 된다.
∇f와 df의 쌍대성은 무엇을 의미할까?
단순히 f:R2→R을 상상하자. 그리고 함수 f의 그래프를 삼차원 유클리드 공간 내부의 곡면으로 바라보자.
이제, 우리가 점 p에서 벡터 v만큼 움직이고자 할 때 (이때, v는 ∇f(p)와 같은 방향이 아니어도 된다), 그 v에 대응하는 f의 변화량을 고려하자. 이때의 함수 f의 변화량은 다음과 같이 표현된다:
f(p+v)−f(p)
한편, ∇f(p)는 곡면 위의 점 (p,f(p))∈R2×R에서 가장 가파르게 증가하는 방향과 그 방향으로의 증가율을 나타내는 벡터이다. 따라서 우리가 조사하고자 하는 v와 ∇f(p)의 방향이 일치할수록 함수 f는 더 많이 증가하게 된다. 이런 맥락에서 ⟨∇f,v⟩는 f의 변화량과 거의 같다.
f(p+v)−f(p)≈⟨∇f,v⟩
실제로, v가 충분히 작다면, 이 근사는 들어맞는다.
한편, v=(x1,x2)라 적을 때,
f(p+v)−f(p)≈∂x1∂fx1+∂x2∂fx2
가 성립한다. ( 여기서, 두 tangent vector (1,0),(0,1)의 직교성은 가정되지 않음)
위의 수식의 우변을 단순히 df(v)라고 바꾸어도 괜찮다.
∂x1∂fx1+∂x2∂fx2=df(v)
위에서, dx1(v):=x1 그리고 dx2(v):=x2를 사용함. (여기서, v=(x1,x2))
다시 말해서, df(v)와 ⟨∇f,v⟩는 모두 주어진 방향 v에서의 함수 f의 변화량을 나타낸다. 그러므로 수학적으로 이 쌍대성은 다음과 같이 표현된다:
사실 아래의 수식은 gradient의 정의로 사용된다. 그래서 등호가 맞음!
df(v)=⟨∇f,v⟩
여기서 이 v를 tangent vector field라 부른다. 대략적으로, 의미는 다음과 같다. 각 점 p∈R2에 대해서, tangent vector vp를 대응시키는 함수이다. 여기서 Tangent vector vp란 함수 f (p 근방에서의) 변화량을 측정하려는 벡터(대략적으로 편미분 연산들∂xi∂∣p들로 생성된 벡터 공간의 원소로 볼 수 있다)라 간주된다. 다만 수학적으로는, 상당히 fancy하게 정의된다.
다시 예시로 돌아가기 위해
그럼, df와 ∇f의 쌍대성을 구체적으로 확인해보자. 다시, 함수 f(x,y)=x2를 생각하자. 그리고 r,θ로 극좌표 변환을 하자. (아니 왜 굳이 어렵게 가는데?)
이번에는 극좌표에서의 gradient를 구하는 공식을 모르는 가운데, 쌍대성만을 가지고 gradient를 구해보려고 한다.
다만, 이 과정을 설명하기 위해서는, 다음 내용을 집고 넘어가야만 한다.
변수변환 기초
유클리드 공간 R2를 생각하자. 그리고 함수 f:R2→R을 생각하자. 이때, df는 다음과 같이 적힌다.
df=dx∂fdx+dy∂fdy.
그리고 점 (x0,y0)∈R2 에 대해서, 접벡터 v=(vx,vy)⊤를 생각하자. 정의에 의하여,
df(v)=vxdx∂f+vydy∂f
이다. 즉, v=(1,0)⊤은 단순히 ∂x∂의 역할을 하고, v=(0,1)은 단순히 ∂y∂의 역할을 한다.
이제, 변수변환 r(x,y),θ(x,y)를 생각하자. 이때,
∂r∂=∂r∂x∂x∂+∂r∂y∂y∂
이므로, r^:=(∂r∂x,∂r∂y)⊤에 대해서,
df(r^)=df(∂r∂x,∂r∂y)=∂r∂x∂x∂f+∂r∂y∂y∂f=∂r∂f.
이 성립함을 알 수 있다. 마찬가지로, θ^:=(∂θ∂x,∂θ∂y)⊤에 대해서,
df(θ^)=df(∂θ∂x,∂θ∂y)=∂θ∂x∂x∂f+∂θ∂y∂y∂f=∂θ∂f.
야코비안 J는 다음과 같이 적히며,
J=∣∣∣∣∣∣∣∣∣∂r∂x∂r∂y∂θ∂x∂θ∂y∣∣∣∣∣∣∣∣∣=∣∣∣∣∣∣cosθsinθ−rsinθrcosθ∣∣∣∣∣∣=r
따라서 r=0 인 경우, 접벡터 vxx^+vyy^:=(vx,vy)⊤를 다음과 같이 기술 할 수 있다.
(vx,vy)⊤=vrr^+vθθ^,(vrvθ)=⎝⎜⎜⎜⎛∂r∂x∂r∂y∂θ∂x∂θ∂y⎠⎟⎟⎟⎞−1(vxvy)
f(x,y)=x2의 구배를 r,θ로 구하기.
가장 간단한 방법은, ∇f를 x^와 y^를 기준으로 다음과 같이 적은뒤, 변수변환 공식을 쓰는 것이다.
f(x,y)=x2이므로, ∂x∂f=2x, ∂y∂f=0이다. 따라서,
∇f=(2x0).
한편, ∇f를 r,θ에 대해서 나타내었을 때, 다음과 같다고 가정하자.
∇f=(ab).
여기서 a는 r 방향 성분, b는 θ 방향 성분이다. 즉, 위의 두 식을 명확히 적으면 다음과 같다
- ∇f=2xx^
- ∇f=ar^+bθ^
위의 두 식이 같아야 하므로, 2rcosθx^=ar^+bθ^를 만족시켜야 한다. 위에서 기술한 변수변환 공식x^,y^→r^,θ^을 사용하면 바로 a,b를 구할 수 있다.
(ab)=⎝⎜⎜⎜⎛∂r∂x∂r∂y∂θ∂x∂θ∂y⎠⎟⎟⎟⎞−1(2rcosθ0)
행렬 계산을 하면:
(ab)=r1(rcosθ−sinθrsinθcosθ)(2rcosθ0).
결과적으로 a와 b는 다음과 같다:
a=2rcos2θ,b=−2cosθsinθ.
쌍대성을 확인하기.
먼저, x^,y^는 R2의 정규 직교기저이다. 따라서, 변수변환 행렬이 곧 내적을 정의하는 행렬과 연관이 있다. 그러니까, 그러니까, 만약 v=ar^+bθ^와 w=cr^+dθ^를 내적하고 싶으면, 먼저 행렬 J을 곱해서 각각을 변수변환하고 그것의 dot product를 하면된다.
⟨v,w⟩=[J(ab)]⋅[J(cd)],
여기서 J는 다음과 같다.
J=⎝⎜⎜⎜⎛∂r∂x∂r∂y∂θ∂x∂θ∂y⎠⎟⎟⎟⎞
그러니까, tangent vectors v,w의 내적은 다음과 같이 계산된다.
⟨v,w⟩:=(ab)J⊤J(cd),
where v=ar^+bθ^ and w=cr^+dθ^
다시 말해서, 아래 행렬이 곧 내적을 결정한다.
J⊤J=(100r2)
이 행렬이 정의하는 내적을 기준으로 쌍대성을 확인해보자.
df(v)=⟨∇f,v⟩
먼저 v에 r^을 대입하여, 좌변 df(r^)=∂r∂f이다.
그리고, 우변의 ∇f=ar^+bθ^라 두면, 단순히 우변은 다음과 같다.
df(r^)=∂r∂f=(ab)(100r2)(10)
따라서 a=∂r∂f이다.
이제, v에 θ^을 대입하여
df(θ^)=∂θ∂f=(ab)(100r2)(01)
따라서 b=r21∂θ∂f이다.
구배의 정의 그리고 리만기하학
미적분학 수준에서는 함수의 기울기(gradient)를 구하는 과정에서, ∇f는 단순한 벡터 필드로 다룬다. 미적분학에서는 이를 쌍대성을 크게 고려하지 않고도 이해할 수 있다. 즉, ∇f는 함수가 가장 빠르게 증가하는 방향과 그 크기를 나타내는 벡터로서 쉽게 다룰 수 있다. 하지만, 리만기하학에서는 ∇f와 미분 형식 df 사이의 쌍대성이 중요한 역할을 하며, 이를 이해하지 않고는 ∇f를 올바르게 계산하기 어렵다.
리만기하학에서는 벡터 필드의 기하학적 성질을 다루기 위해, 계량 텐서(metric tensor)를 사용한다. 이는 벡터들 사이의 거리와 각도를 정의하는데 필수적이다. 리만기하학에서는 ∇f를 계량 텐서를 통해 계산하는 방식이 도입되며, 이는 두 번째 계산 방식으로 볼 수 있다. 이를 더 깊이 이해하기 위해, 먼저 구배의 정의를 살펴보겠다.
구배의 정의
리만기하학에서 함수 f의 구배(gradient) ∇f는 다음과 같은 방식으로 정의된다. 내적 공간에서, 구배는 미분 형식 df와 계량 텐서 gij의 관계를 통해 정의되며, 이는 함수 f의 변화량을 특정 방향에서 측정하는 데 사용된다.
보다 구체적으로, 구배 ∇f는 미분 형식 df와 쌍대적인 벡터 필드이다. 즉, 임의의 벡터 v에 대해 다음과 같은 관계가 성립시키는 벡터로서 정의된다.
df(v)=⟨∇f,v⟩g
여기서 ⟨⋅,⋅⟩g는 리만 계량을 통한 내적을 의미하며, gij를 사용하는 내적 연산이다. 리만기하학에서는 좌표계가 곡선 좌표계이기 때문에, 이러한 내적을 통해 벡터의 크기와 방향을 정확하게 정의할 수 있다.
리만기하학에서 구배를 계산하는 방식
리만기하학에서, 구배 ∇f는 계량 텐서 gij를 사용하여 다음과 같이 계산된다:
∇f=gij∂xj∂f
여기서 gij는 계량 텐서의 역행렬이며, xj는 좌표 성분이다. 그리고, 위 수식은 인덱스가 위아래로 쌍을 이루면 그에 대해 자동으로 합(sum)이 이루어진다는 의미이다.
예: 극좌표계에서의 구배
예를 들어, 예시 문제에서 r,θ에 대한 구배 ∇f를 계산하려면, 다음과 같은 계량 텐서를 사용해야 한다:
gij=(100r2)
여기서, g12=g21=0인 이유는, g를 아래와 같이 계산하였을때, drdθ 대응하는 성분이 0이기 때문이다.
g=dx2+dy2=d(rcosθ)2+d(rsinθ)2=(cosθdr−rsinθdθ)2+(sinθdr+rcosθdθ)2=(cos2θ+sin2θ)dr2+(r2sin2θ+r2cos2θ)dθ2+(−2rcosθsinθ+2rsinθcosθ)drdθ=dr2+r2dθ2.
역행렬은 자명히,
gij=(1001/r2)
이고 따라서 극좌표계에서의 구배는 다음과 같이 구해진다:
∇f=(g11+g21)∂r∂fr^+(g12+g22)∂θ∂fθ^=∂r∂fr^+r21∂θ∂fθ^
결론
리만기하학에서는 구배 ∇f와 미분 형식 df의 쌍대성을 이해하는 것이 필수적이다. 미적분학에서는 이러한 관계가 직관적으로 단순하게 다루어질 수 있지만, 리만기하학에서는 계량 텐서를 통해 이 관계가 보다 정확하고 체계적으로 정의된다. 따라서, ∇f를 올바르게 계산하기 위해서는 계량 텐서를 이용한 계산 방식이 필수적이다.