SARSA: On-policy TD Ctrl
Learning action-value function
On-policy에서는
현재 behavior policy 에 대한
를 추정한다
동시에 가 에 대해 더 탐욕적으로 되도록
를 변화시킨다
학습을 돌이켜 보면
episode는 state와 state-action pairs의 나열로 구성되었다
아래 그림은 이를 표현한다

이제는 state-action pair 간 transition을 고려하고
state-action pair의 value를 학습할 것이다
nonterminal state ()에서
매 transiton 이후 마다 이러한 update가 되며,
terminal state ()에서
()는 0으로 정의한다
MC와의 비교
MC는 terminal state가 보장되지 않은 경우, (도착지/목표가 계속해서 변화한다던가)에 사용할 수 없다
이에 반해 SARSA는 이와 상관 없이
정책이 좋지 않아도 에피소드마다 빠르게 학습한다
이유는 정책을 바꿀 수 있기 때문이다
Q-learning: Off-policy TD Ctrl
학습된 Q는 자신이 따르는 정책에 상관없이
를 직접적으로 근사한다
즉, Q는 확률 1에서 로 수렴한다
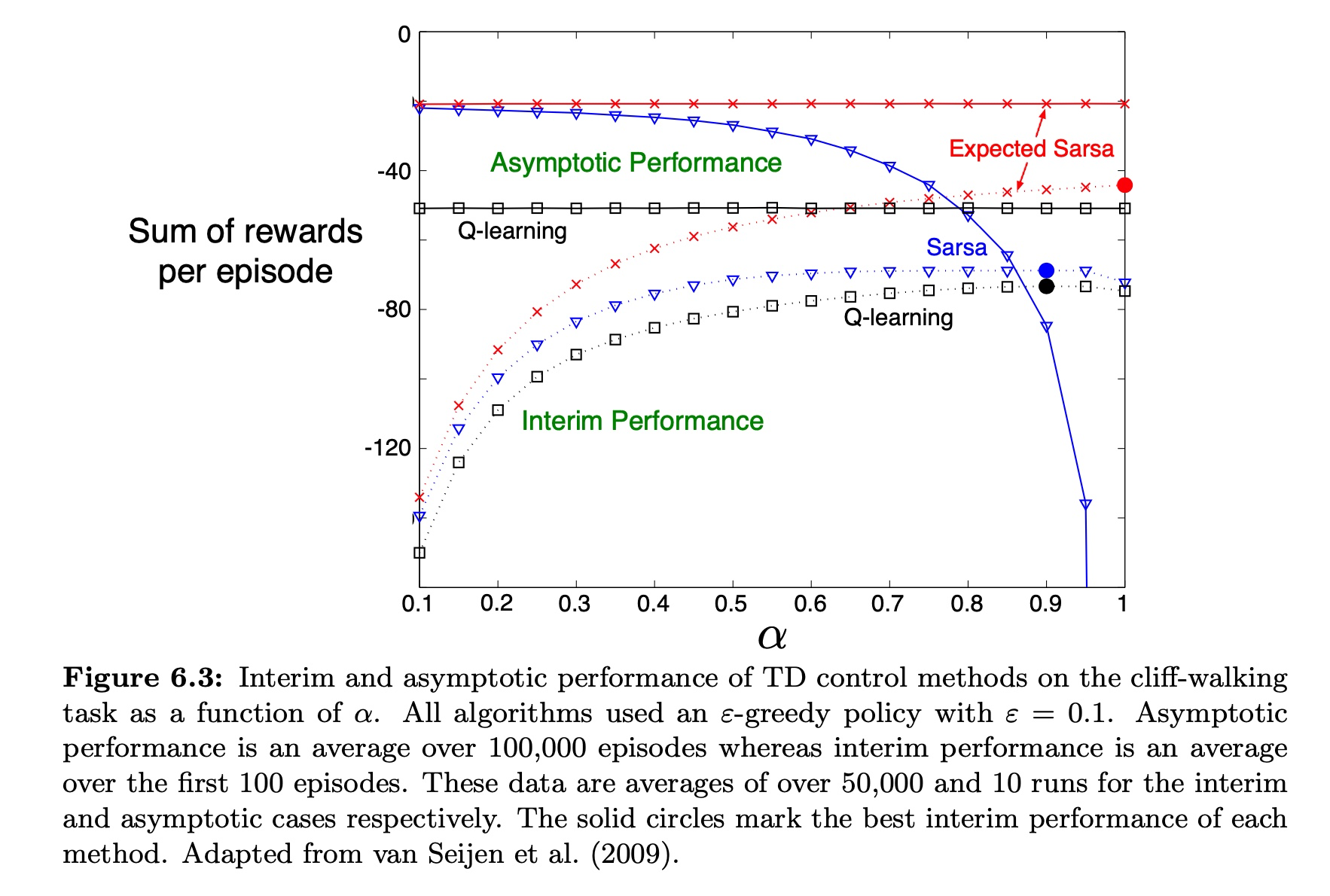
절벽 걷기 상황에서
Q learning은 optimal policy의 value를 학습하기에,
절벽 끄트머리를 따라 걷는다
그렇기에 절벽에서 떨어진 상황에 크게 감점을 받게 되고
이는 -greedy action selection으로 인해 피할 수가 없다
안전한 길을 찾고자 할 때는 오래 걸리지만 SARSA를 사용해야 한다
즉, Q-learning은 On-line 성능이 낮다.
Expected SARSA
SARSA와 다르게
다음 action을 무작위로 선정하기 때문에 분산(variance)이 없어졌다.
SARSA는 작은 로 오래 돌려서 성능을 얻어야 하기 short-term 성능이 낮다.
반면에 Expected SARSA는 점점 성능이 떨어지지 않으면서 으로 설정할 수 있다.
Expected SARSA는 target policy마다 다른 policy를 사용하기에,
on-policy도 되지만 off-policy에도 적용된다.
예로, 가 greedy policy라면 좀 더 탐험에 치중하여 Q-learning에 유사해진다
Backup Diagram of TD Ctrl
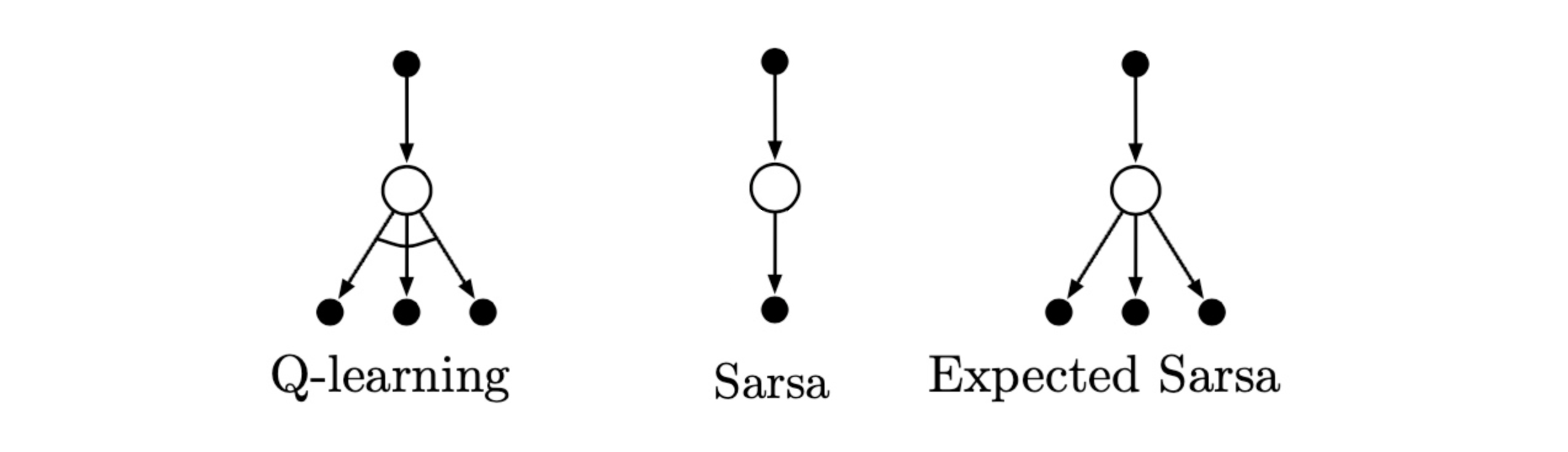
Q-learning의 식을 보면 state-action value를 갱신하므로
back-up diagram에서 root node와 leaf node는 작고 색이 칠해진 behavier node로 표시한다
Maximization Bias and Double Learning
가장 큰 추정치를, 실제값으로 고려해서 생기는 bias에 대해서 알아보자
Maximization
-
항상 가장 높은 확률을 가진 action을 선택하는 것
-
Q-learning에서는 greedy policy로 최대 action value를 선택하고,
-
SARSA는 -greedy 는 최대화 전략을 사용한다.
-
Maximization bias
- 실제 최대값은 0이지만 추정값의 최대값이 positivie bias일 때
- 추정값의 최대값: 추정값 너머의 최대값이 최대값을 추정한 값으로 사용
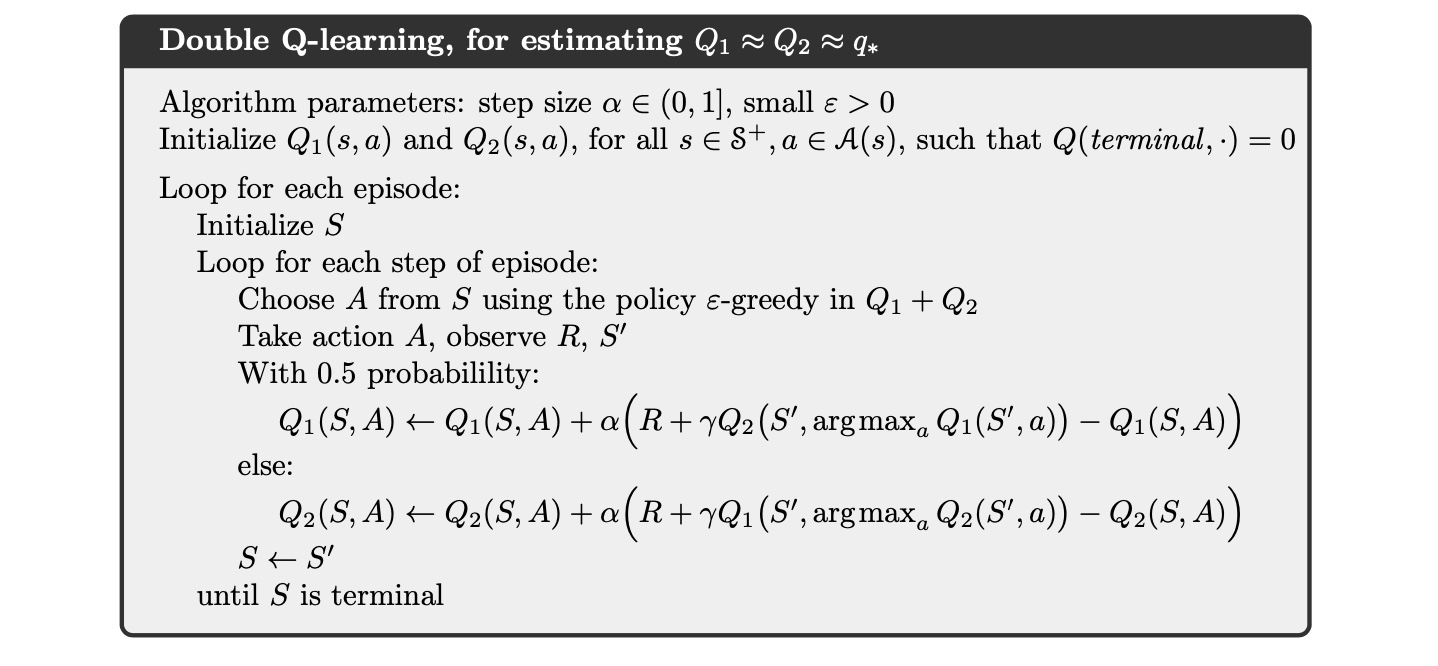
Double Learning

위와 같은 상황에서
Q-learning은 초기에 오른쪽보단 왼쪽만 선택하는 경향을 피하기 위하여
Double Q-Learning을 사용해볼 수 있다
이는 maximization bias에 영향을 받지 않기 때문이다
두 개의 추정값을 학습하고 오직 하나만 업데이트한다
이는 메모리를 두 배로 요구하지만 단계별 계산량이 늘어나지는 않는다
estimate of the true value :
estimate of player 1 :
estimate of player 2 :
maximize action of player 1:
maximize action of player 2:
estimate of value :
unbiased estimate :
repeat ... for second unbiased estimate Q_1(argmax_aQ2(a))$
full MDP에서 확장된 개념으로, 동전 던지기 결과가 앞쪽이면 update를 실시한다.
두 개의 approximate value functions는 완전히 symmetrical하게 다뤄진다.
behavior policy는 둘 다 action-value 추정값을 사용한다.
Double Q-Learning