
예측 문제를 풀기 위해 경험을 활용
두 방법 모두,
policy 를 따르는 어떤 경험이 주어졌을 때,
그 경험에서 발생한 비종단 상태 에 대해
의 추정값 를 갱신한다
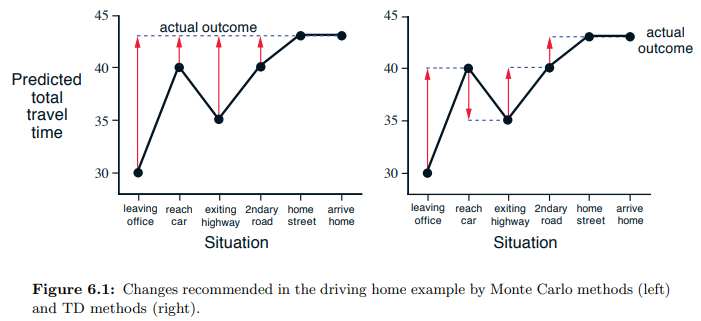
Stationary MC
에피소드가 끝나야만 를 알 수 있다
- : 시각 t 이후의 실제 이득
- : 고정 시간 간격 파라미터
TD(0) : 단일 단계(One-step)
다음 시간 단계까지만 기다리면 된다
시각 t+1에서 즉각적으로 목표를 형성하고,
관측된 reward 과 추정값 을 이용하여 갱신 수행
부분적으로 이미 존재하는 추정값을 기반으로 갱신되기에, bootstrap 방법이다
TD 방법은 Monte Carlo의 표본추출과 DP의 bootstrap을 결합한다
- =
- Monte Carlo:
- 실제 value의 기댓값을 알 수 업식에 표본의 value를 사용
- DP:
- 기댓값이 환경의 model로부터 완전히 제공된다고 가정하므로 기댓값은 알지만
이 알려져 있지 않기 때문에
대신 현재 추정값 이 사용된다
- 기댓값이 환경의 model로부터 완전히 제공된다고 가정하므로 기댓값은 알지만
- Monte Carlo:
Optimality of TD(0)
batch updating
- 이용 가능한 경험과 에피소드가 유한할 때 점증적으로 수렴하는데, 가치함수의 근사값 V는 모든 비종단 상태에서 계산되지만 변화 횟수는 증가량의 총합만큼 단 한 번이다.
- 그 후 모든 이용 가능한 경험이 새로운 가치함수와 다시 처리되어 새로운 전체 증가량을 만들어내고
- 이 과정은 가치함수가 수렴할 때까지 계속된다
- 즉, - 학습 데이터에 대한 각각의 batch 처리 이후에 갱신이 수행됨
maximum-likelihood estimate
- 데이터를 생성할 확률이 가장 큰 파라미터 값
certainty-equicalence estimate
진행되는 과정의 추정값이 근사값이 아닌 확실히 알려졌음을 가정
TD(0)가 MC보다 더 빨리 수렴하는 이유
- MC는 mse 최소화하는 추정값을, TD(0)는 MDP의 maximum-likelihood estimate에 대해 올바른 추정값을 찾는다
- 일반적으로, TD(0)는 certainty-equivalence estimate로 수렴하기에 MC보다 빠를 수 있다. 더 좋은 추정값으로 이동해서.
alive