🚘 Ouster LiDAR 설치 및 드라이버 연동 (ROS Noetic, Ubuntu 20.04)
✅ 1. 환경 정보
-
OS: Ubuntu 20.04
-
ROS: Noetic
-
LiDAR: Ouster OS-1-128
-
IP 설정:
- Ouster 센서:
192.168.1.88 - PC (Ethernet):
192.168.1.100
- Ouster 센서:
✅ 2. 의존 패키지 설치
sudo apt install -y \
ros-noetic-pcl-ros \
ros-noetic-rviz \
build-essential \
libeigen3-dev \
libjsoncpp-dev \
libspdlog-dev \
libcurl4-openssl-dev \
libpcap-dev \
cmake✅ 3. Catkin Workspace 구성 및 ouster_ros 클론
mkdir -p ~/ouster_ws/src
cd ~/ouster_ws/src
git clone --recurse-submodules https://github.com/ouster-lidar/ouster-ros.git✅ 4. 빌드 설정 및 컴파일
기존에 catkin_make로 빌드된 워크스페이스가 있는 경우, 잔재 제거:
cd ~/ouster_ws
rm -rf build devel그 후 catkin build 환경 설정:
catkin config --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
catkin build✅ 5. 센서와의 네트워크 설정
Ouster는 기본적으로 192.168.1.88을 사용하므로, PC의 Ethernet 인터페이스도 같은 대역이어야 한다.
즉 Ouster LiDAR는 기본적으로 192.168.1.88로 IP가 설정되어 있으므로, 이와 동일한 서브넷 (예: 192.168.1.100)으로 PC의 이더넷 주소를 설정해줘야 함
sudo ifconfig enx00e04d6df4b3 192.168.1.100 netmask 255.255.255.0
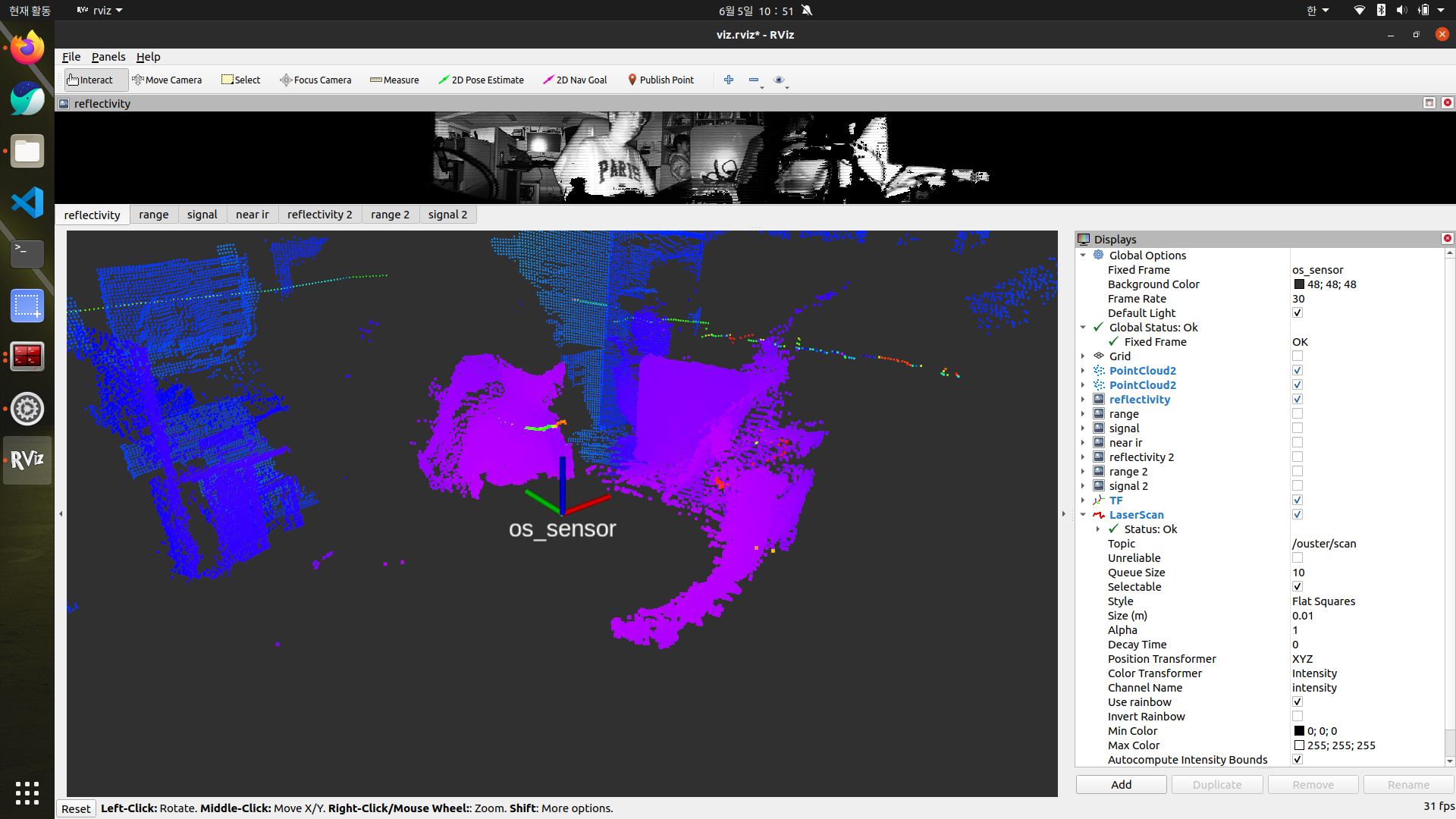
ping 192.168.1.88 # 연결 확인✅ 6. 드라이버 실행 및 RViz 연동
roslaunch ouster_ros driver.launch sensor_hostname:=192.168.1.88정상 동작 시 다음과 같은 로그가 출력됨:
Contacting sensor 192.168.1.88 ...Sensor 192.168.1.88 was configured successfullyWrote sensor metadata to 192.168.1-metadata.json
✅ 7. 확인 사항
/ouster/points,/ouster/imu토픽이 활성화됨rviz에서/ouster/points를PointCloud2로 시각화 가능- 자동으로 metadata
.json파일이 생성되어 추후 재사용 가능
💡 Tips
- 네트워크 튜닝이 필요하다면 다음 스크립트 실행:
cd ~/ouster_ws/src/ouster-ros/util
sudo ./network-configure.bash-
생성된 메타데이터는 다음 경로에 저장됨:
~/ouster_ws/src/ouster-ros/192.168.1-metadata.json
이제 Ouster LiDAR ROS 드라이버 설치 및 연동 끝!
지금까지 해온 여러 활동들을 간략하게라도 정리해보고자 합니다.