보완 가능한 2가지
✅ [보완 1] LiDAR-IMU 하드웨어 동기화
IMU와 LiDAR가 동일한 PPS(Pulse Per Second) 또는 sync pulse를 받게 설정
예: Ouster LiDAR의 SYNC_OUT → Xsens IMU의 SYNC_IN
그러면 sampleTime64()도 LiDAR랑 거의 동일 기준으로 맞춰짐 → firstRosTime 설정할 필요도 없어짐✅ [보완 2] GNSS 기반 absolute time 동기화 (시간 서버 기반 PTP)
네트워크에 GNSS time server 또는 PTP master clock을 넣어서
LiDAR + IMU가 전부 절대 시간으로 직접 timestamp 기록
ROS에서 stamp 손댈 필요도 없어짐# 1. LiDAR 실행
roslaunch ouster_ros driver.launch sensor_hostname:=192.168.1.88 timestamp_mode:=TIME_FROM_ROS_TIME
# 2. IMU 실행
roslaunch xsens_mti_driver xsens_mti_node.launch
# 3. IMU timestamp fixer 실행
python3 imu_timestamp_fixer.py
# 4. 통합 동기화 노드 실행
python3 simple_sync.py
# 5. 타임스탬프 체크
$ rosrun lio_sam timestamp_check_synced.py
#6 liosam 실행
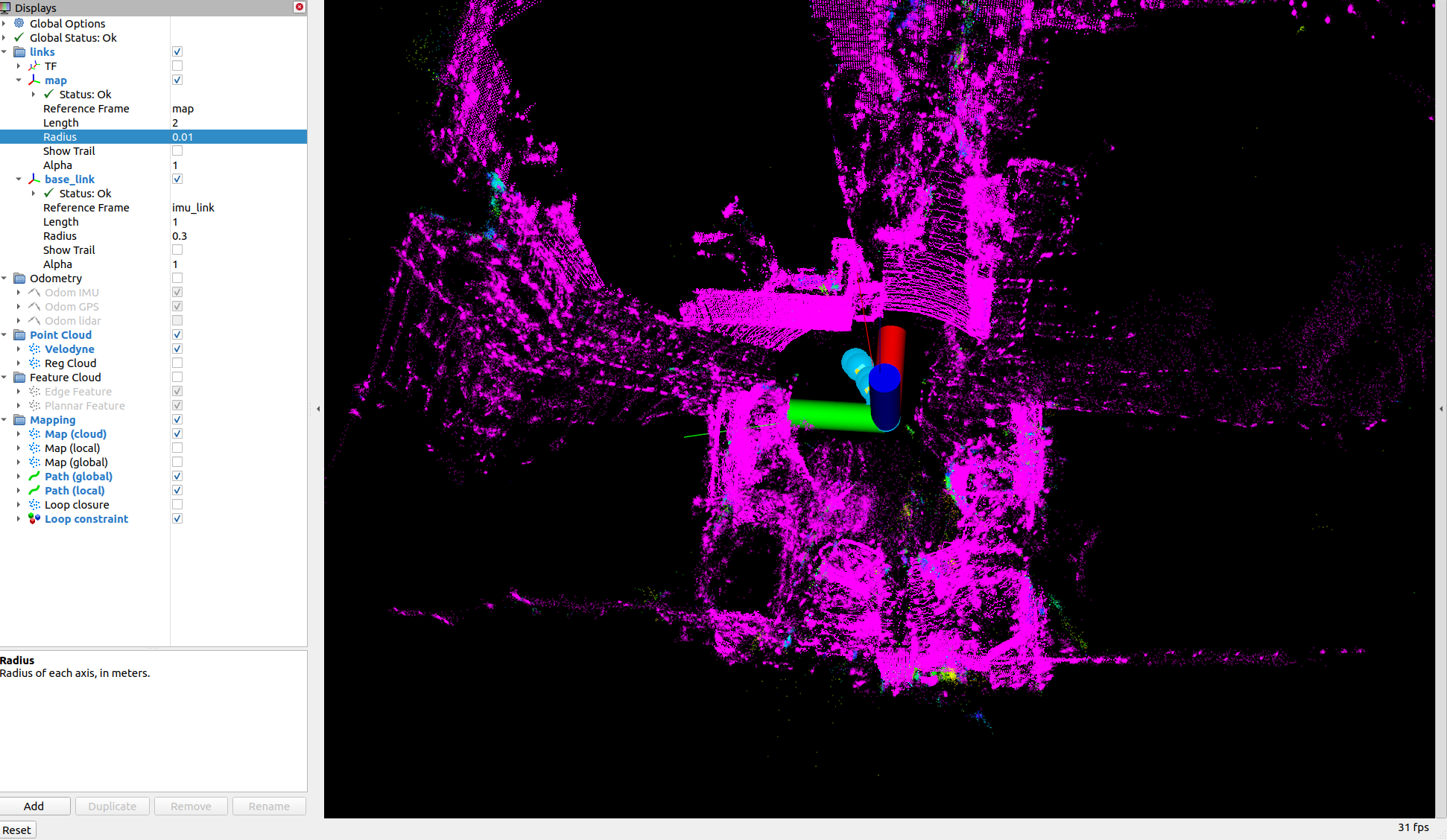
hi@blade:~/ouster_ws$ roslaunch lio_sam run.launch
rostopic echo /lio_sam/mapping/odometry
rostopic echo /lio_sam/mapping/path
rostopic echo /lio_sam/mapping/map_local
지금까지 해온 여러 활동들을 간략하게라도 정리해보고자 합니다.