ROS2
1.[ROS2] 설치 및 설치 확인, 삭제

공식 document 자세한 내용은 공식 document를 참고하세요! ROS2란? Robot Operating System의 줄임말로, 로봇에 특화된 다양한 라이브러리와 개발환경을 제공하는 오픈소스 운영체제이다. 기존의 운영체제를 이용하여 동작된다. 하드웨어 지식
2.[ROS2] 패키지, 노드, 토픽, 서비스, 액션, 파라미터

ROS2의 기본 구조 node ROS2에서 실행가능한 최소 단위를 node라고 한다.(쉽게 말해 파이썬, c++파일 하나.) 이 node들을 실행시킨 뒤 node들이 통신하는 형태로 소프트웨어가 구현된다. 구조 작업공간인 workspace 속에 하나 이상의 node를
3.[ROS2] 워크스페이스 만들기, 패키지 빌드하기, 노드 작성하기

..
4.[ROS2] launch file 작성하기
launch file이란 작성법 launch file은 yaml, xml, python file로 만들 수 있다. tag를 사용하는 xml 파일이 가장 짧고 간단하지만, 여러가지 기능을 수행하려면(launch file 안에서 또 다른 launch file 실행 등)
5.[ROS2] TF2 (TransFormation System)

TF(tranformation system)의 정의와 필요성 로봇을 이용하다보면 여러 좌표계가 필요하고, 이 좌표계간의 관계가 중요해진다. robot이 어떤 world frame안에 있다고 해보자. 이 때 world frame을 제외하고 다른 좌표계를 이용하지 않는다
6.[ROS2] QoS(Quality of Service) Profile이란?
QoS Profile이란? QoS Profile이란 쉽게 말해 데이터 통신 옵션을 설정하는 것이다. ROS2를 통해 msg를 주고 받을 때 이 QoS Profile을 설정하여 통신을 최적화할 수 있다. ROS2에서 제공하는 QoS Profile은 History, Rel
7.[ROS2] URDF 작성하여 가상환경에 로봇 나타내기
visualize robot ROS에서는 visualization tool인 RVIZ를 제공한다. RVIZ를 이용하면, robot과 주변 환경의 state를 visualize할 수 있다. 이 때 robot model이라는 이름의 토픽을 이용하여 가상환경에서 robot
8.[ROS2] msg, srv 자료형 정의하기
..
9.[ROS2] YDLiDAR TG50 연결하여 정보 받아오기
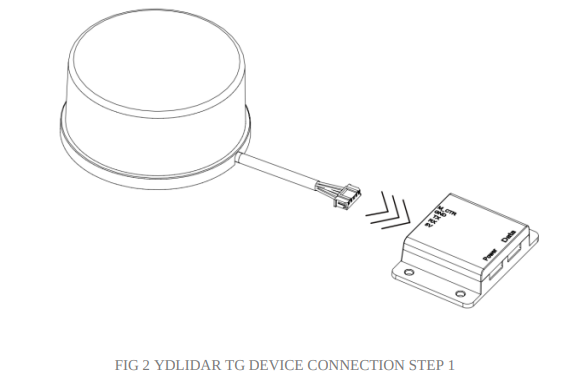
오늘은 YDLidar TG50을 통해 scan 정보를 받아오고, 그 정보가 무엇을 의미하는지 확인하고, 가시화하는 과정을 거쳐보도록 하겠다. YDLiDAR get YDLiDAR DRIVER