1. Introduction
Kinematics of manipulators
- 동작의 원인인 Force에 대해서는 생각하지 않고 motion에 대해서만 다루는 역학을 의미하고 정지해 있는 상황에서 manipulater의 position과 orientation을 표현하는 것을 목표로 한다.
2. Link/Link-connection description
- manipulator는 joints에 의해 연결된 bodies들의 집합을 의미하고 이 body들을 link라고 부른다.
-
joint
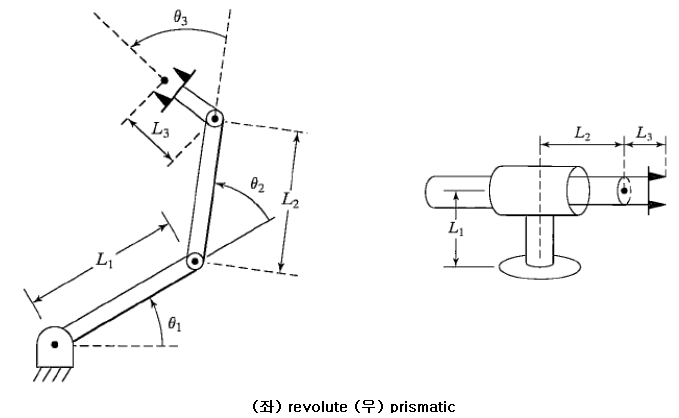
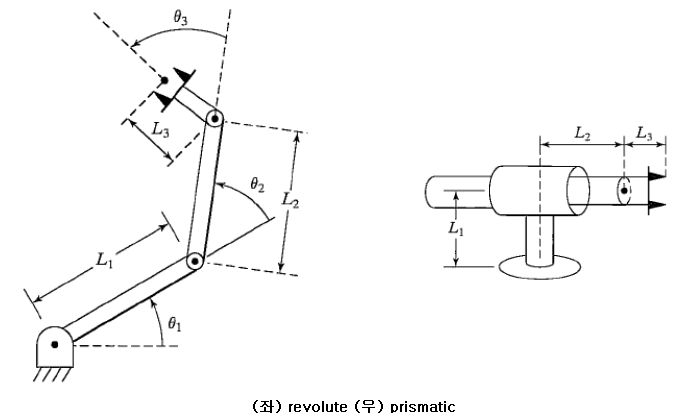
이웃하는 link 사이에 연결된 부분을 joint라고 부르며, revolute joint와 sliding joint로 나뉜다.
-
link
모양이 변하지 않는 rigid 형태이다.
-
일반적으로 manipulator는 3차원 상의 end-effector의 포지션을 위해 최소 6개의 joints를 필요로한다.(공간상에 객체를 표현하기 위해 6개의 parameter가 필요하기 때문 )
-
Link와 Joint의 표현
- link는 움직이지 않는 link를 0번으로 넘버링하고 순차적으로 번호를 증가시키며 부여한다.
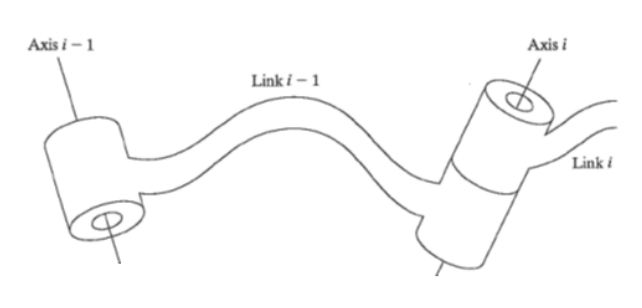
- joint는 회전축(axis)으로 표현하고 link i-1과 link i와 연결된 joint를 axis i로 표현한다.
- Link Description
link는 link length와 link twist 2가지로 표현할 수 있다.
- link length() : axis i-1축과 axis i 축 사이의 mutually perpendicular한 선의 거리를 의미
- link twist() : axis i-1축과 axis i 축 사이의 right-hand 각도를 의미
- Link Connection Description
link connection은 link offset와 joint angle 2가지로 표현할 수 있다.
- link offset() : axis i-1축과 axis i 축 사이의 mutually perpendicular한 선의 거리를 의미
- joint angle() : axis i-1축과 axis i 축 사이의 right-hand 각도를 의미
3. Convention for affixing frames to links
Intermediate links in the chain
앞써 정의한 Link, Link Connection과 frame 간의 관계를 알아보자.
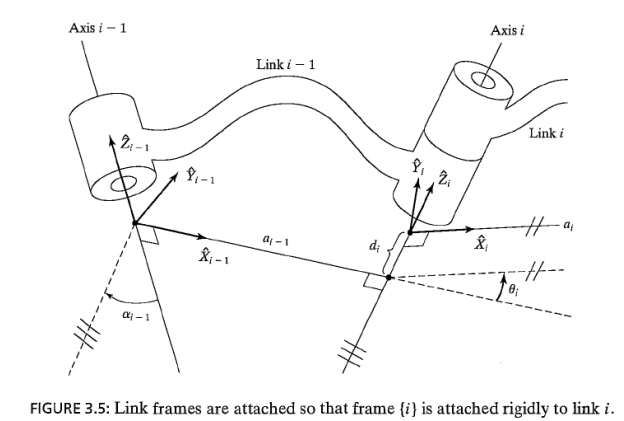
중간 link, link Connection 일 때,
- axis 의 방향으로 를 설정
- 의 방향으로 를 설정
- right-hand 규칙을 따라 남은 를 설정
처음 혹은 마지막 link, link Connection 일 때,
- 를 제외한 나머지()가 모두 0이 되게 끔 orientation을 설정
- 를 제외한 나머지()가 모두 0이 되게 끔 orientation을 설정
즉, 최대한 0을 많이 가지게 하도록 처음과 마지막 frame을 설정
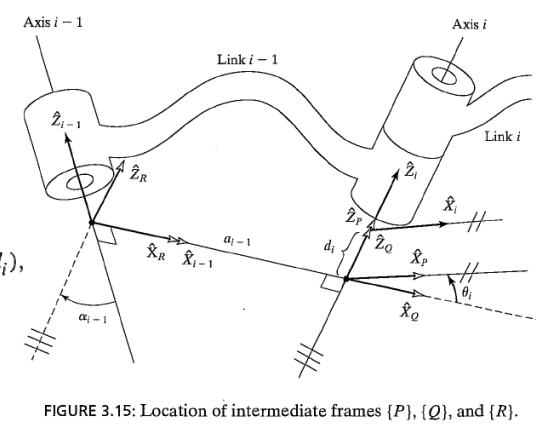
Summary of the link parameters
- : 축을 따라서 측정된 에서 까지의 거리
- : 에서 사이의의 각도
- : 축을 따라서 측정된 에서 까지의 거리
- : 에서 사이의의 각도
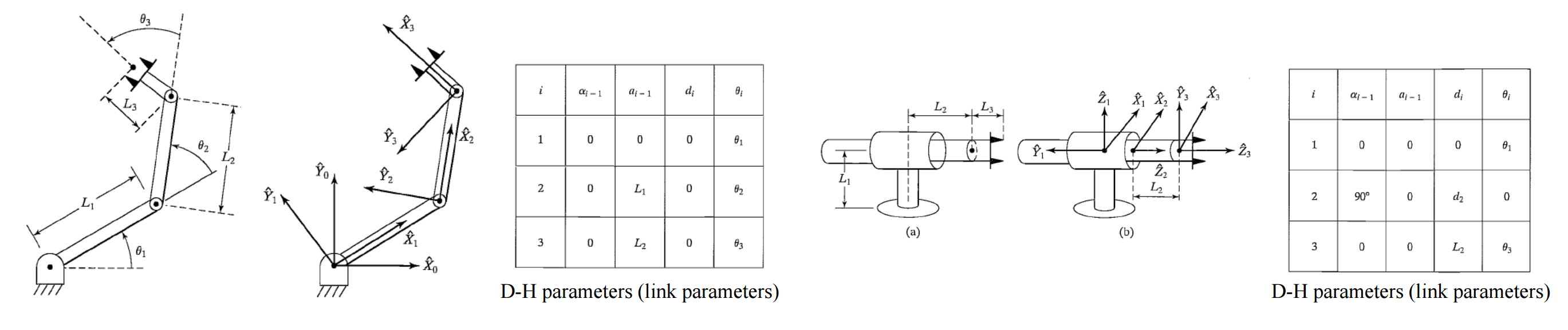
4. Manipulator kinematics
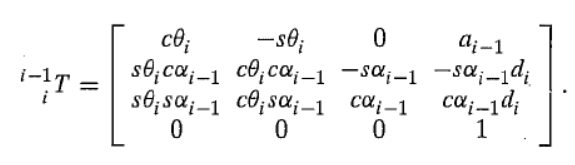
- D-H parameters를 이용해 Transformation matrix를 정의해보자.