1. Forward Kinematics와 Inverse Kinematics
-
Forward Kinematics : mainipulator의 joint angles이 주어졌을 때, 모든 frame의 position과 orientation을 구하는 것을 의미
-
Inverse Kinematics : End Effector의 position과 orientation이 주여졌을 대, joint angles을 구하는 것을 의미
2. Solvability
2-1. Existence of solutions
- Dextrous Workspace : End Effector 모든 orientation으로 도달할 수 있는 공간을 의미
- Reachable Workspace : End Effector 적어도 하나의 orientation으로 도달할 수 있는 공간을 의미
아래와 같은 manipulator가 존재한다고 할 때 L1,L2 의 길이에 따라 Workspace가 달라질 수 있다.
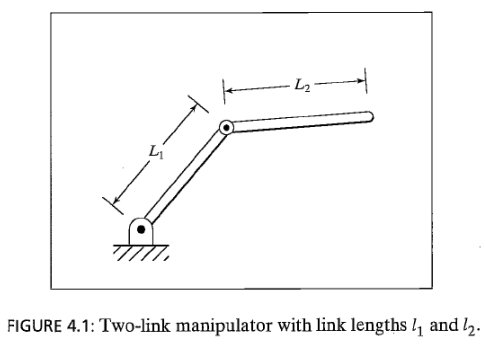
- L1=L2 : 고정된 Link의 중심만 Dextrous Workspace이고 L1+L2를 반지름으로 하는 원만큼이 Reachable Workspace이다.
- L1=L2 : Dextrous Workspace는 없으며, L1, L2의 길이에 따라 Reachable Workspace가 변경된다.
2-2. Multiple solutions
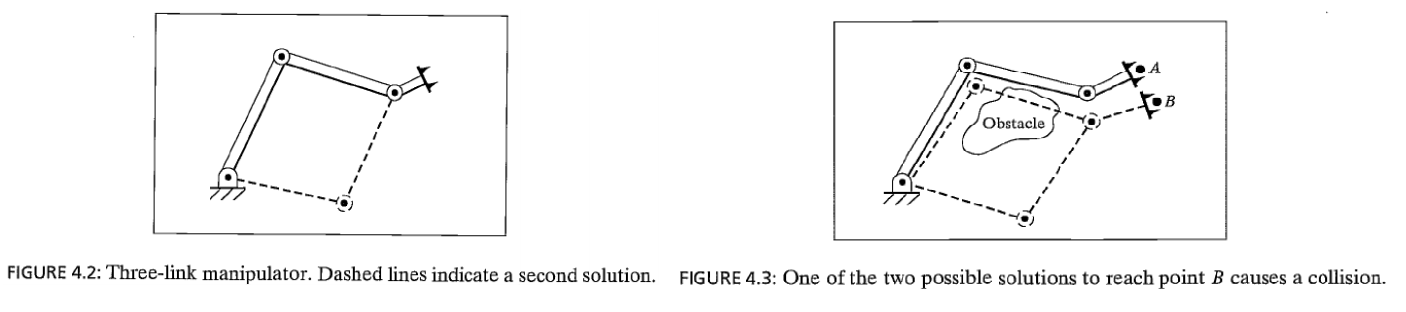
- Fig 4.2와 같이 특정 x,y,ϕ를 가지는 joint angles의 조합은 다수 존재할 수 있다.
<어떤 조합을 선택해야하는 지에 대한 문제>
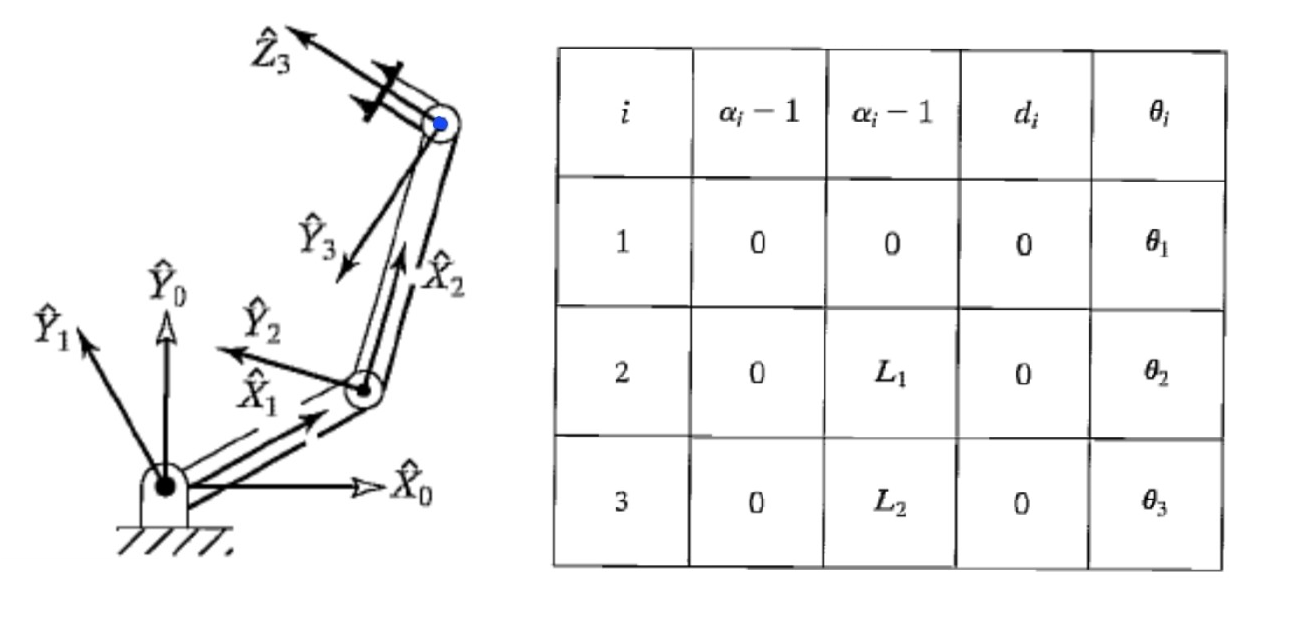
- Fig 4.3과 같이 특정 x,y,ϕ로 가기 위한 경로 중 obstacle에 의해 불가능한 경로가 존재할 수 있다.
<어떤 경로를 따라가야하는 지에 대한 문제>
2-3. Method of solution
-
Closed-form solutions과 Numerical solutions이 존재할 수 있다.
-
Closed-form은 Numerical 보다 연산량이 적지만, 해가 존재하지 않을 수도 있으며 Algebraic 방식과 Geometric 방식으로 나뉠 수 있다.
3. Algebraic vs Geometric
3-1. Algebraic Method
-
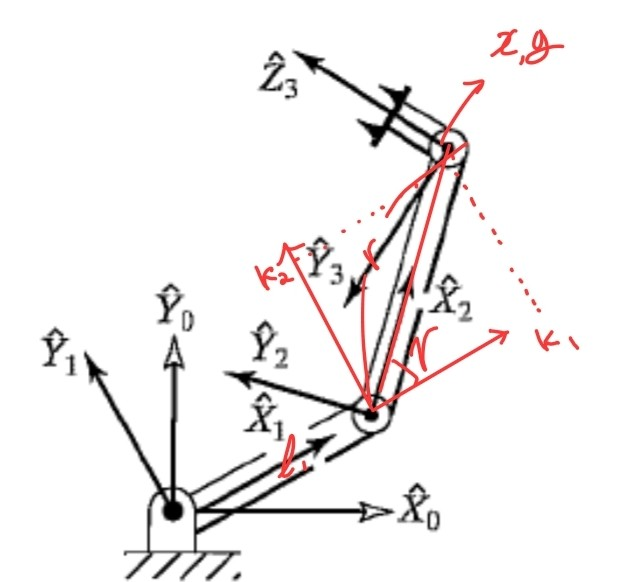
아래와 같은 시스템으로 구성된 manipulator의 3번 Link의 orientation과 position이 주어졌을 때, 각 joint의 angle을 Algebraic Method를 사용하여 구하는 것을 목표로 한다.
-
Forward Kinemetics = Inverse Kinematics를 풀자
30T=⎣⎢⎢⎢⎡c123s12300−s123c123000010l1c1+l2c12l1s1+l2s1201⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡cϕsϕ00−sϕcϕ000010xy01⎦⎥⎥⎥⎤
cϕ=c123,x=l1c1+l2c12
sϕ=s123,y=l1s1+l2s12
x2+y2=l12+l22+2l1l2c2
c2=2l1l2x2+y2−l12−l22, s2=±1−c22
-
c2에서 바로 cos−1를 이용해 θ2를 구할 수 있으나, 여러 해가 존재할 수 있으므로, Atan2(s2,c2)를 이용해 θ2를 구함.
-
θ1을 구하기 위해 (r,γ,k1,k2) 를 아래와 같이 설정하고 식을 변환
[step 1]
x=l1c1+l2c12, where c12=c1c2−s1s2
y=l1s1+l2s12, where s12=c1s2+s1c2
[step 2]
x=k1c1−k2s1, where k1=l1+l2c2
y=k1s1+k2c1, where k2=l2s2
[step 3]
r=k12+k22,γ=Atan2(k2,k1),k1=rcosγ,k2=rsinγ
γ+θ1=Atan2(ry,rx)=Atan2(y,x)
θ1=Atan2(y,x)−Atan2(k2,k1)
- θ1,θ2를 이용하여 나머지 θ3를 구한다.
cϕ=c123,sϕ=s123
θ1+θ2+θ3=Atan2(sϕ,cϕ)=ϕ
3-2. Geometric solution
- 삼각형의 특성을 기하학적인 특성(제 2 cos법칙)을 이용한 Inverse Kinemetics
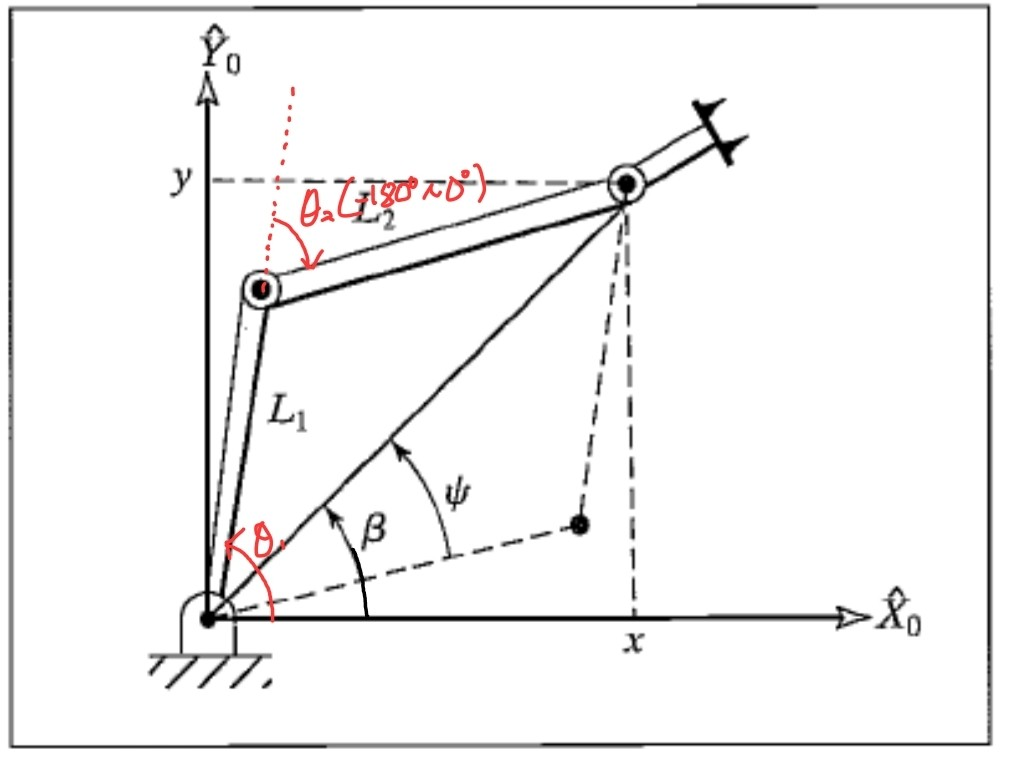
1.제 2 cos 법칙을 이용해 θ2을 구한다.
x2+y2=l12+l22−2l1l2cos(180+θ2)
c2=2l1l2x2+y2−l12−l22,(θ:−180°∼0°)
θ2=cos−1(2l1l2x2+y2−l12−l22)
2.제 2 cos 법칙을 이용해 θ1을 구한다.
cosψ=2l1x2+y2x2+y2+l12−l22
θ1=β±ψ
- θ1,θ2를 이용하여 나머지 θ3를 구한다.
θ1+θ2+θ3=ϕ 