로봇공학
1.Ch1. Spatial descriptions and transformations
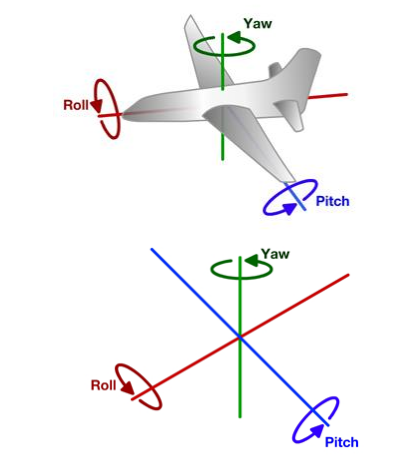
1. Postions, Orientations, frames Positions 기준 좌표계가 정의되었을 때, 좌표계에 정의 될 수 있는 위치들을 Position 이라고 한다. 또한, 기준 좌표계가 정의되면 * 어떠한 point 라도 3 x 1 vector로 표현이
2024년 5월 8일
2.Ch2. Manipulator kinematics
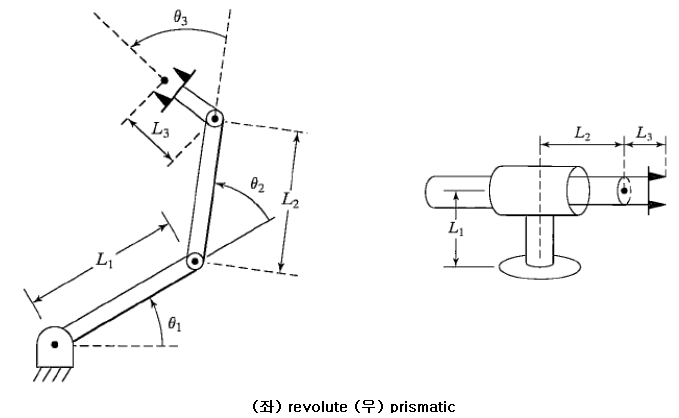
동작의 원인인 Force에 대해서는 생각하지 않고 motion에 대해서만 다루는 역학을 의미하고 정지해 있는 상황에서 manipulater의 position과 orientation을 표현하는 것을 목표로 한다.manipulator는 joints에 의해 연결된 bodie
2024년 5월 9일
3.Ch3. Inverse manipulator kinematics
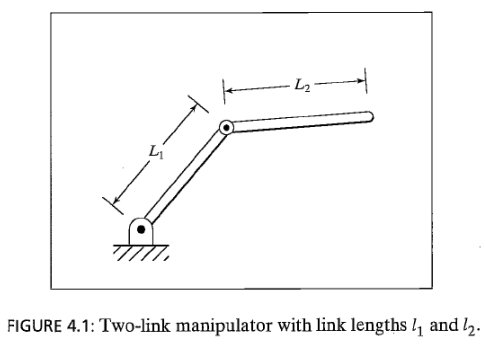
Forward Kinematics : mainipulator의 joint angles이 주어졌을 때, 모든 frame의 position과 orientation을 구하는 것을 의미Inverse Kinematics : End Effector의 position과 orient
2024년 5월 10일
4.Ch4. Jacobians: velocities and static forces
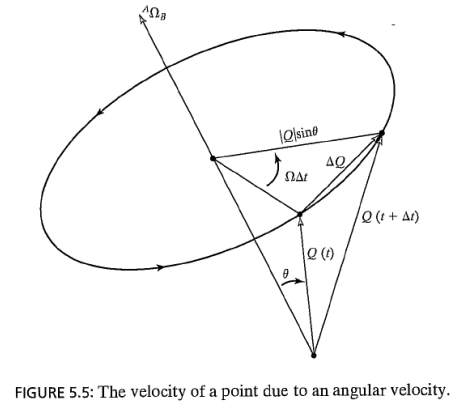
기존의 Static posiition problems 이었던 것을 벗어나 rigid body의 linear velocity와 angular velocity까지 고려해본다.{B} frame에서 position Q를 미분하는 식은 아래와 같다.$${}^BVQ=\\frac{
2024년 5월 13일