1. Intorduction
- 기존의 Static posiition problems 이었던 것을 벗어나 rigid body의 linear velocity와 angular velocity까지 고려해본다.
2. Notation for time-varying position and orientation
2-1. Differentiation of position vectors
- {B} frame에서 position Q를 미분하는 식은 아래와 같다.
-
{B} frame에서 미분한 position 를 {A} frame에서 표현하면 아래와 같다.
-
고정된 frame 가 있을 때, 식을 간편하게 표현하기 위에 아래와 같이 표현할 수 있다.
아래의 식은 frame 의 origin의 velocity를 frame 에서 미분, 표현하는 식
2-2. Angular velocity vector
-
각속도 벡터는 어떤 좌표계를 기준으로 다른 좌표계가 회전할 때, 그 회전축과 속도를 나타내기 위한 벡터로 3x1 matrix로 구성되어 있다.
-
position vector와 동일하게 아래와 같이 표현할 수 있다.
frame 에서 표현한 frame 에서 바라본 frame 의 angular vectorframe 에서 표현한 frame 에서 바라본 frame 의 angular vector
3. Linear and rotation velocity of rigid bodies
3-1. Linear velocity
- frame 의 Rotation matrix가 상수일 때 즉 회전하지 않을 때 frame 에서 미분, 표현한 점 의 선속도를 구하는 경우
3-2 Rotation velocity
- 식을 간단하게 표현하기 위해 frame 와 의 origin이 서로 같다고 가정하고 식을 전개해 보자.
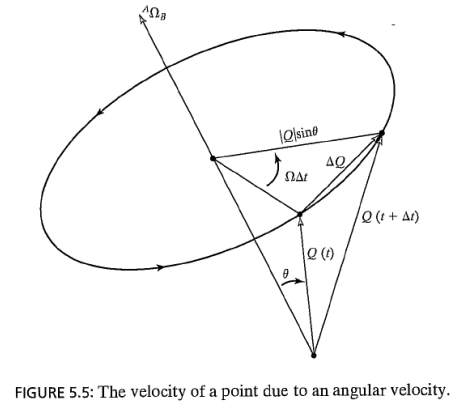
- 의 궤적이 그래는 원의 반지름은 로 구할 수 있다.
- 시간동안 움직인 각도는 로 나타낼 수 있고 가 이동한 거리 는 로 표현할 수 있다.
- 마지막으로 점 를 frame 에서 미분, 표현한 선속도는 로 나타낼 수 있고, 이는 외적을 이용해 다시 나타낼 수 있다. ()
- 최종적으로 Linear veolcity와 Rotation velocity가 둘다 존재할 때는 아래와 같은 식으로 일반화 할 수 있다.
3-3 By Differential
- 3-1, 3-2와 같이 증명할 필요없이, 미분을 통해 바로 구할 수 있다.
[step1]
[step2]
[step3]
4. Motion of links of a robot
- 로봇에서 linear velocity와 angular velocity의 표현
- : link 0에서 미분한 link i에 대한 linear velocity
- : link 0에서 미분한 link i에 대한 angular velocity
5. Velocity "propagation" froma link to link
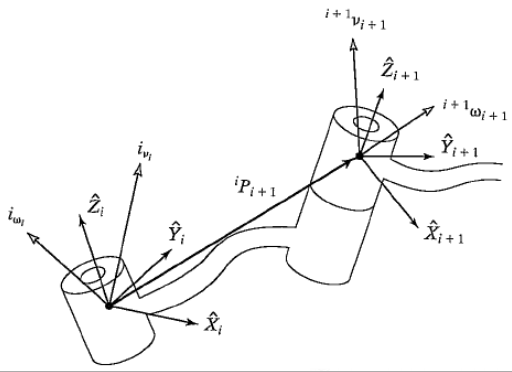
- link i+1의 velocity는 link i에 영향을 받기 때문에 을 표현할 때 이를 고려해야한다.
5-1. Linear velocity of link i+1
- 은 link i에 의해 발생하는 link i+1의 linear velocity이고, 는 link i+1의 join의 rotational veloicty에 의해 발생하는 link i+1의 linear velocity로서 이 둘을 합한 값이 이다.
- 위 식에 를 곱해 식을 정리하면 아래와 같다.
5-2. Angular velocity of link i+1
- 은 link i에 의해 발생하는 link i+1의 angular velocity이고, 는 link i+1의 join의 rotational veloicty에 의해 발생하는 link i+1의 angular velocity로서 이 둘을 합한 값이 이다.
- 위 식에 를 곱해 식을 정리하면 아래와 같다.
