NeRF 의 등장 이후 3D novel-view synthesis 분야는 NeRF's family 의 범람을 맞이했다. 하지만 Vanilla NeRF 는 real-world task 로 적용하기에는 여러가지 한계점이 있으며, (e.g, Slow convergence & inference (rendering) rate, Dataset, Background <-> Foreground... ) 그 중 한 가지는 Quantization 으로 Ray casting 을 근사하기 때문에 발생할 수 있는 Aliashing 문제이다. Mip-NeRF 의 저자들은 Ray 에서 particle 을 sampling 하는 현재의 Ray Casting 방식 대신에, CG 의 Mip-Map 기법에서 착안한 Cone-Casting-Based Mip-NeRF 를 제안한다. ICCV2021 Oral
1. Introduction
NeRF 는 Neural Network (MLP) 의 non-linear function 에 대한 well-approximation 능력을 바탕으로, 주어진 공간 상의 특정한 particle 의 oppcaity (σ) 와, 특정한 direction 에서 이를 바라볼 때 이 particle 의 색 (RGB) 를 예측하도록 설계된 Model 이다. (NeRF Review)
이러한 discreatization 에 대한 문제는, 학습 이미지 이상의 고해상도를 렌더링 할 때의 NeRF 가 aliashing 등으로 인한 artifacts 를 생성할 수 있다는 것이다. SuperSampling 등의 방식을 통해 이를 해결할 수 있겠지만, 이는 너무 느리다는 단점이 존재한다.
NeRF의 aliashing 문제를 해결하기 위해서, 저자들은 anti-aliashing 의 한 기법인 Mip-Map 에 주목한다. Mip-Map 은 어떠한 texture object 를 multi-scale 로 저장하여 geometry 에 따라 적절한 해상도의 texture 를 선택하여 표현하는 기법이다. Supersampling 등의 기법과 대비하여 이는 anti-aliashing 을 학습이 아닌 inference 단계에서 실행하게 되므로, training computational burden 을 줄일 수 있다. (Pre-Filtering)
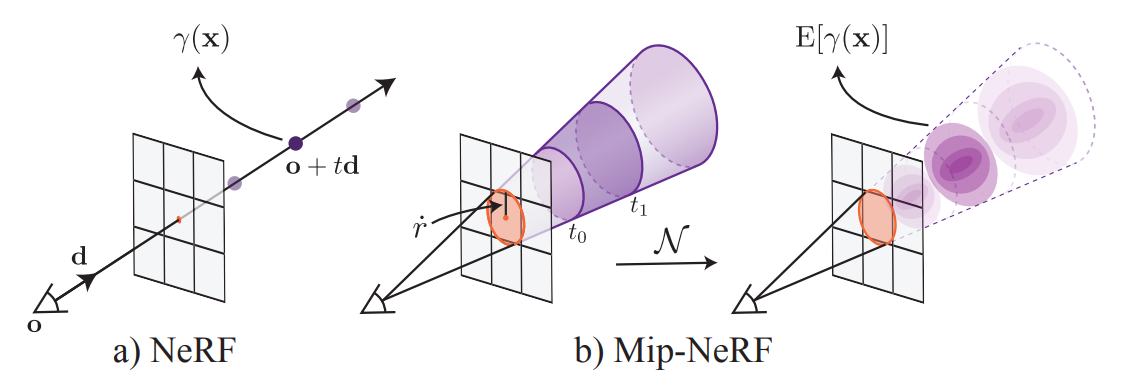
Mip-Map 에 착안하여 저자들은 pixel 이 아닌 area 의 color 를 계산하는 Mip-NeRF 를 제안한다. Mip-NeRF 는 위의 그림과 같이 a) ray 를 따라 pixel 을 렌더링하는 Ray Casting 방식이 아닌, b) pixel 과의 거리에 따른 multi-scale area 를 렌더링하는 Cone Casting 방식을 사용한다.
2. Methods
2.1. Cone Tracing and Positional Encoding
2.1.1. Cone Tracing
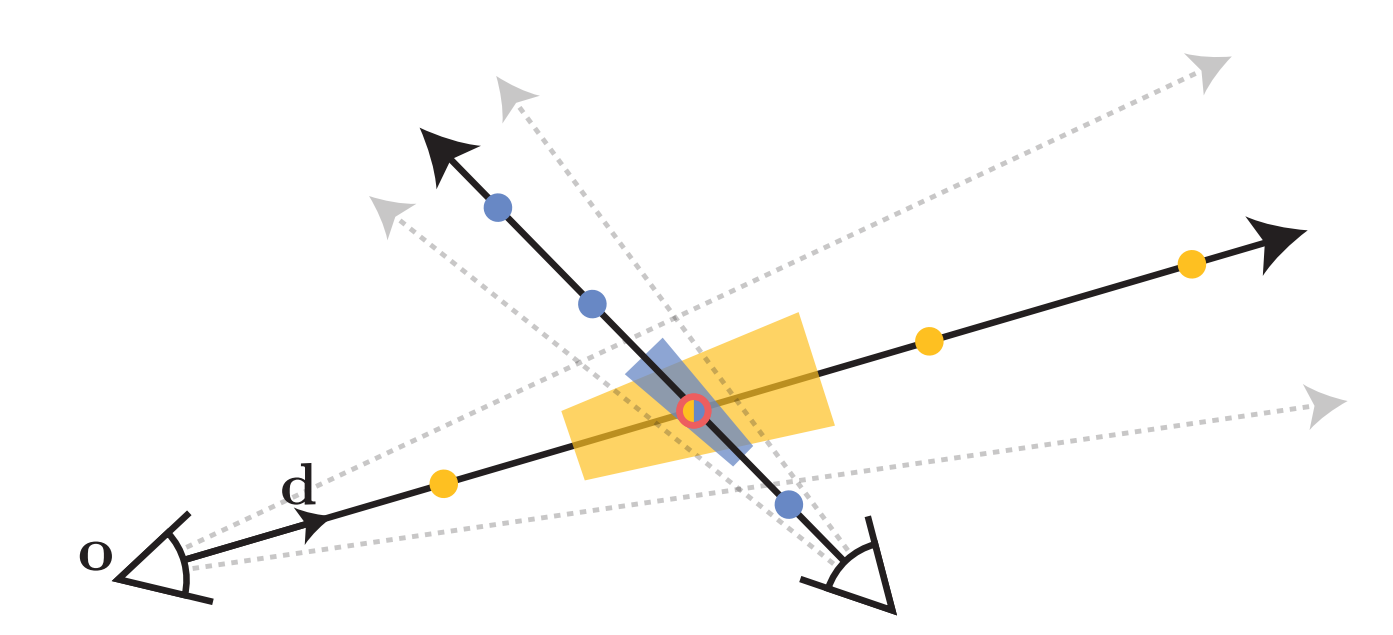
앞서 설명한 바와 같이 NeRF 와 대비되는 Mip-NeRF 의 가장 큰 특징은, Ray 가 아닌 Cone 을 Casting 한다는 데 있다. 즉 우리는 Cone Casting 을 위해 공간 상의 특정한 점을 Cone 의 일정 영역인 conical frustrum 으로 나타낼 수 있어야 한다.
Camera center (o) 와 한 particel (pixel) 을 바라보는 방향 (d) 를 생각하자.
주어진 pixel 이 나타내는 영역의 크기를 r˙ 이라 할 때, (world coordinate's width scaled by 2/12 ), Cone 의 중심을 지나는 직선 위의 t 에 대해서 구간 [t0,t1] 사이에 존재하는 position x 는 다음 정의된 F 의 함숫값이 1인 점들의 집합으로 정의할 수 있다.
이와 마찬가지로 우리는 특정한 conical frustrum 이 나타내는 영역을 positional encoding 과 같은 방법으로 high-dimension 으로 mapping 해줄 필요가 있다. i.e., Construct a featurized representation of the conical frustrum.
Ideal 한 featurized representation of conical frustrum γ∗ 은 conical frustrum 내의 모든 점에 대한 positional encoding 의 expected value 일 것이다. 즉,
이제 우리는 Conical frustrum 에서 position φ 에 대한 probability density function P(r,t,θ)=rt2/V 을 정의할 수 있으며, 이를 통해 E[t],E[t2],E[x],E[y] 을 유도할 수 있다 (cf.r∼x2+y2 ).
각 값들의 denominator 가 t1−t0 를 포함하고 있으므로, 이는 numerically unstable 한 결과를 초래할 수 있다. 따라서 저자들은 tμ=(t0+t1)/2,tσ=(t1−t0)/2 을 이용해 다음과 같이 reparametrization 한 값을 사용하였다.
IPE 가 wider range 를 나타낼수록 high-frequency 를 softly remove 하며 다시 말해 일종의 smooth 한 Low-pass Filter 처럼 작동하는 것을 알 수 있다. Low-pass Filter 는 대표적인 Anti-alsiashing 의 한 방법으로, IPE 가 자연스럽게 Anti-alsiashing 을 야기할 것임을 알 수 있다.
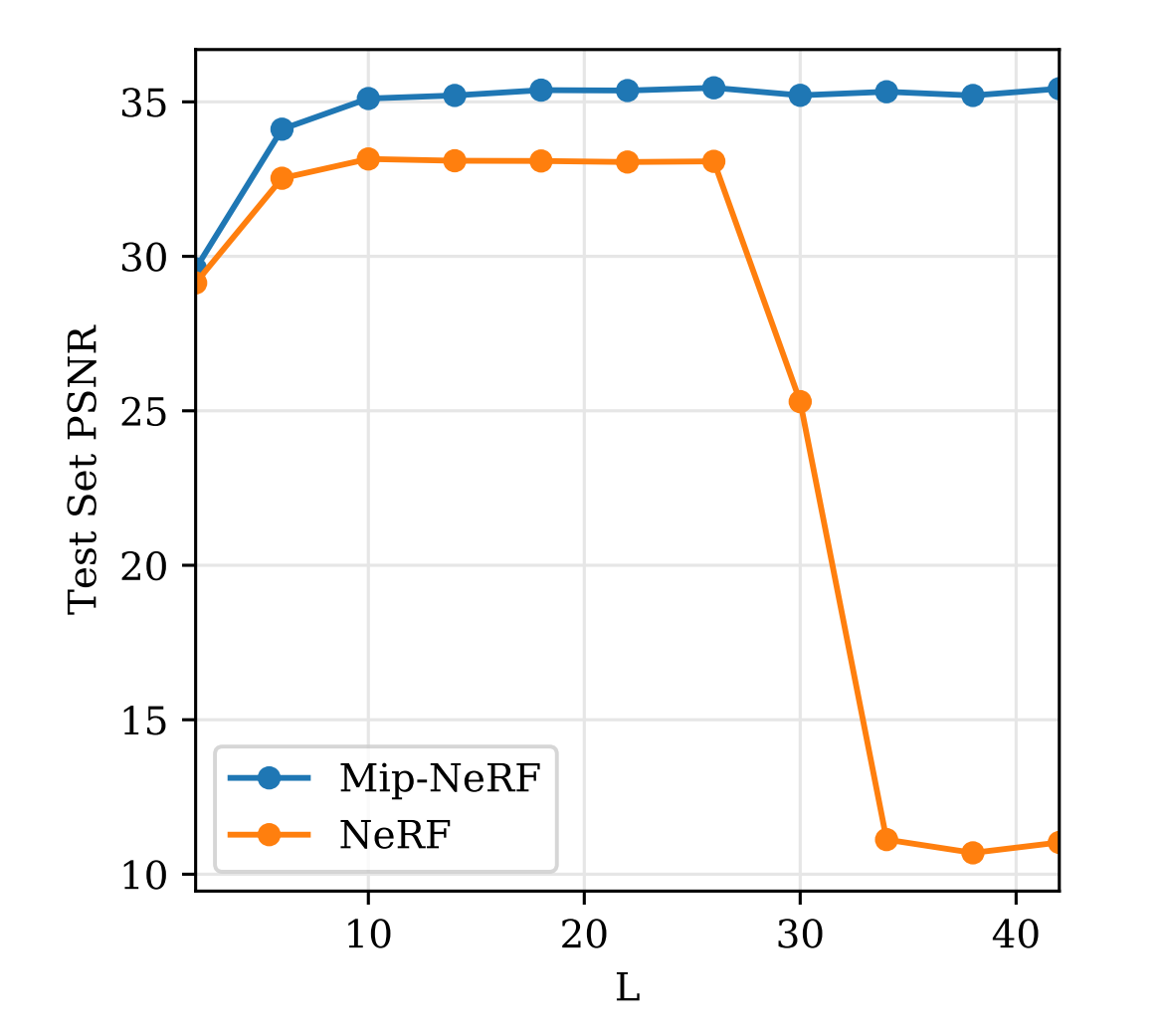
반면 Gaussian 으로 근사되는 IPE 의 경우에는 area 의 scale 에 따라 이러한 truncation 이 soft 하게 적용되기 때문에 L-invariant 한 결과를 얻는다고 한다. 아래의 실험에서 이를 확인할 수 있는데, PE 의 경우 일정 이상의 L 에 대해서 심각한 overfitting 이 일어나는반면, IPE 에서는 그렇지 않은 것을 알 수 있다.
2.2. Architecutre
2.2.1. Training Objective & Hierarchical Strategy
Cone Tracing 을 위시한 IPE 를 input 으로 사용하는 것 외의 Mip-NeRF 와 NeRF 의 차이점은 많지 않지만, 한 가지 주요한 차이점은 NeRF 의 hierarchical sampling 을 단일 Network 를 통해 구현할 수 있다는 데 있다.
Vanilla NeRF 에서의 coarse network 와 fine network 는 quantization rate 가 다르기 때문에 각각 low resolution <-> high resolution 으로 학습된 network 라고 생각할 수 있다. 이는 Vanilla NeRF 는 multi-scale ability 가 없기 때문이다.
이에 반면 Mip-NeRF 는 cone tracing 으로 multi-scale 을 나타낼 수 있으며, single Mip-NeRF network 로 hierarchical sampling 을 진행할 수 있다. 즉, parameters of a single Mip-NeRF Θ 를 학습하는 Training Objective 는 다음과 같다.
여기서 tc,tf 는 각각 Vanilla NeRF 처럼 stratified sampling 과 이를 통해 구한 weight 로 inverse sampling 을 통한 coarse, fine sampling 이다.
tf 의 sampling 전에 weight 에 다음과 같은 filter 를 적용하였다고 한다.
wk′=21(max(wk−1,wk)+max(wk,wk+1))+α
식을 보면 일종의 moving average 처럼 작용함을 알 수 있는데, 이를 통해 wide & smooth upper 한 weight 를 생성하여 사용하였다고 한다.
이는 stratified sampling 의 결과에 일종의 blur filter 를 적용한 것과 같은데, 즉 이 자체로 anti-aliashing 의 효과가 있다. Experiments 에서는 weight modification 에 대한 ablation 이 존재하지 않는데 이에 대한 ablation 도 있었으면 좋았을 것 같다.
2.2.2. Model Details
이 부분은 supplementary material 에 재구현을 위해서 자세하게 작성되어 있다.
1) Identity Concatenation
Original NeRF에서의 positional encoding 은 다음과 같이 Identity Concatenation 을 사용한다.
x=x+γ(x)
Mip-NeRF 에서는 이러한 setting 이 performance 향상에 도움을 주지 않아서 IPE 그대로만 사용했다고 한다.
2) Activation Functions
Original NeRF 에서 사용되는 두 activation funcions 1) ReLU, 2) Sigmoid 를 각가 다음으로 대체하였다.
Relu →log(1+exp(x−1)), i.e. softplus
Sigmoid →(1+2ϵ)/(1+exp(−x))−ϵ, i.e. widened sigmoid
3. Experiments
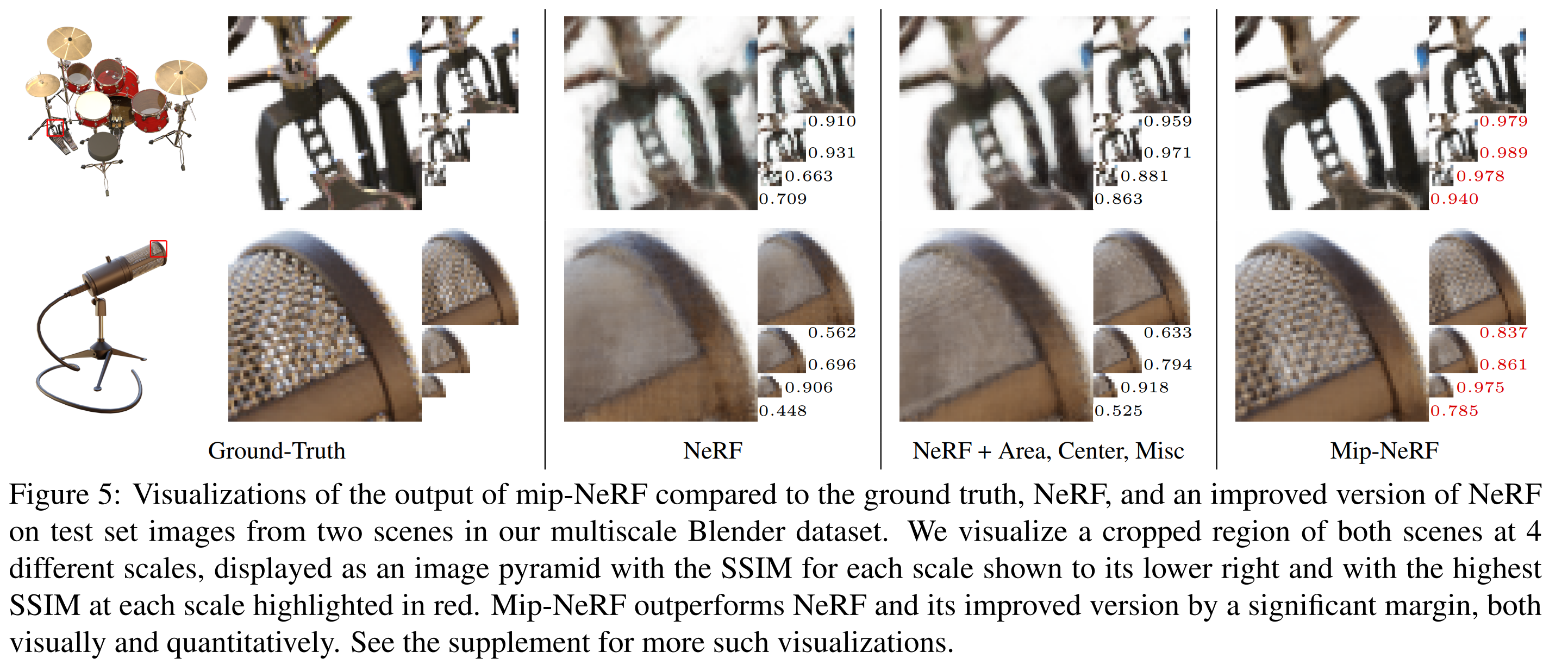
위의 Qualitative Results 는 left: NeRF, right: Mip-NeRF 를 나타낸 것이다. NeRF 가 multi-scale 에서의 결과가 망가지는데 반면에, Mip-NeRF 는 그렇지 않은 것을 시각적으로 확인할 수 있다.
Figure 를 통해서 Mip-NeRF 의 multi-scale 에서의 능력을 잘 보여주는데, 이를 마치 mip-map 처럼 visualize 하여 약간의 웃음 포인트였다.
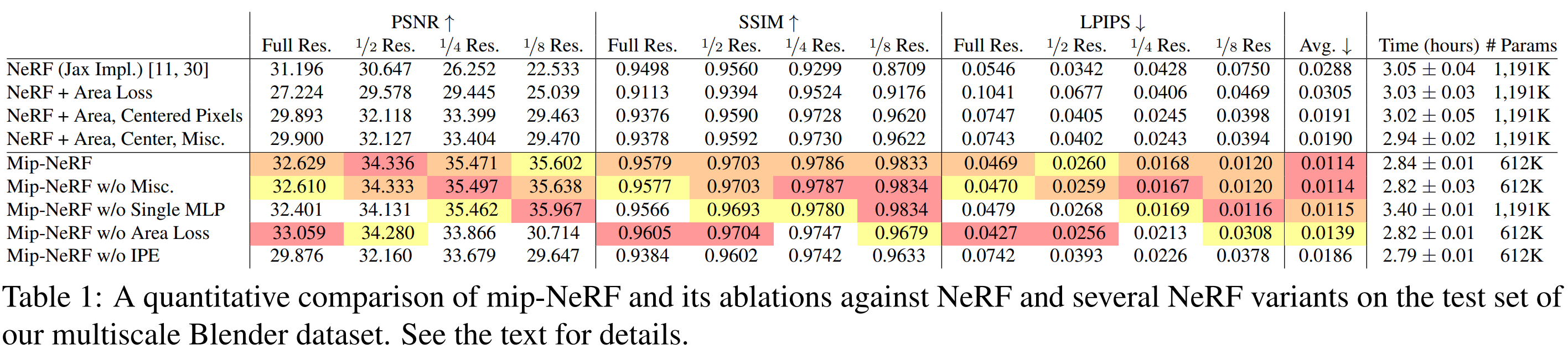
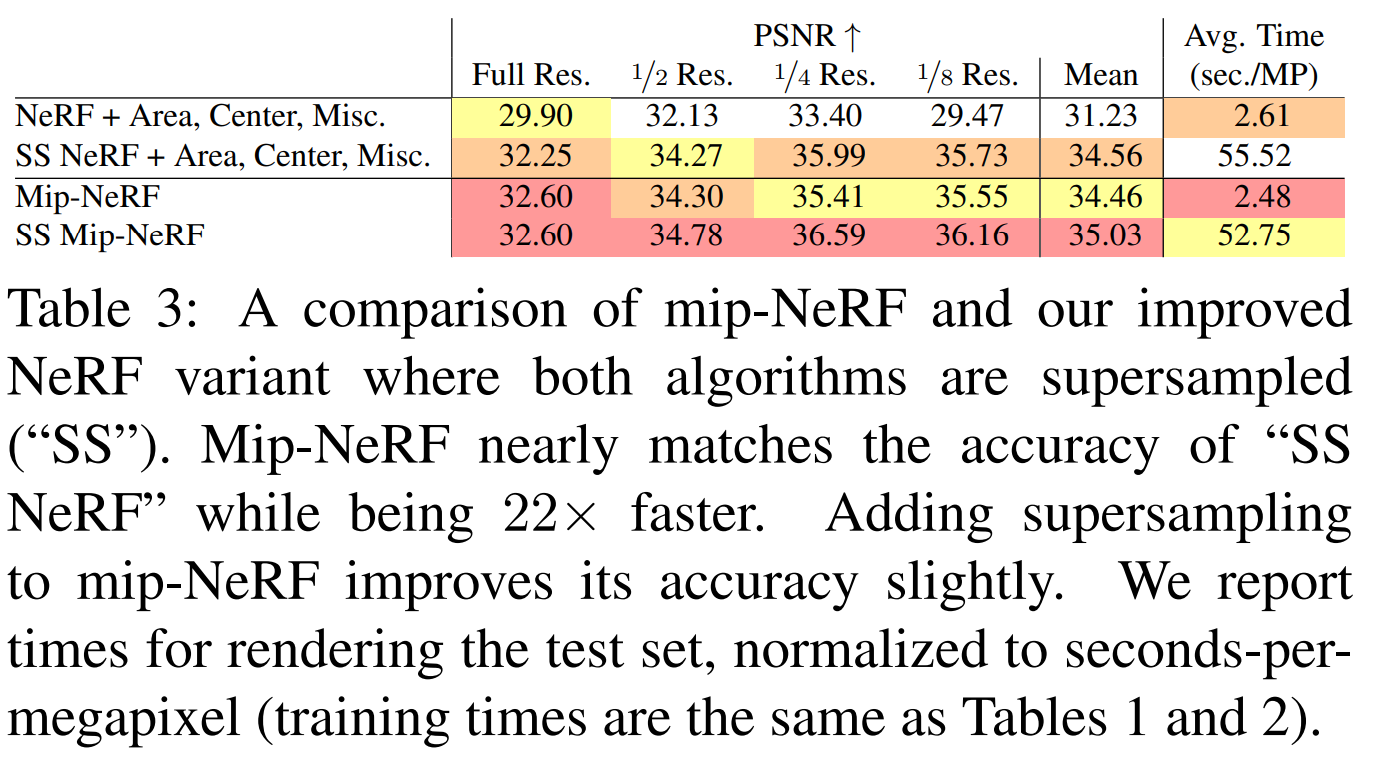
Qualitative results 외에도 quantitative results 로 Mip-NeRF 의 multi-scale performance 가 Table1, Table3 에 잘 나타나 있다. 전체적으로 Vanilla NeRF 과 비교해 월등한 결과를 보이면서도 Supersampling 기법을 사용하는 NeRF 보다 효율적으로 학습될 수 있음을 보여주고 있다.