Proprioceptive sensors
- 자기 자신의 움직임을 감지하는 센서
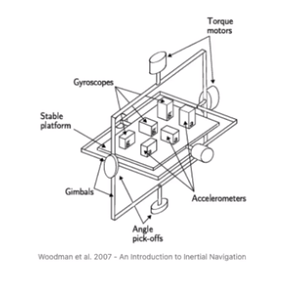
IMU
Intertial measurement unit
- Linear acclerator(선형 가속도 측정)센서와 Angular gyroscope(각속도 측정) 센서가 혼합된 센서
- Spring-damper system의 원리를 이용
- Optical system - 차랑용IMU
- MEMS - 스마트폰 및 소형 디바이스 IMU
장점
- Computer grade 제품은 저렴한 편(자동차는 동일 성능에 저렴하지 않음)
- 높은 sensitivity
- 높은 FPS(100~4000HZ)
단점
- 엄청나게 빠른 drift 누적
- 보정을 위해 Camera/LIDAR/GNSS 와 함께 사용
Wheel encoder
바퀴의 회전량 (RPM)과 이동량(=바퀴의 회전량 * 바퀴의 둘레)을 측정하는 센서
장점
- 자동차에는 기본적으로 탑재
- 로봇, 드론 자율주행에도 제어를 위해 센서가 탑재되어 있음
- 자동차의 위치추정을 위한 Dead Reckoning 알고리즘에 많이 사용됨
단점
- Odometry를 할 시 drift에 약함
- 바퀴가 헛도는 경우 잘못된 센서의 값이 생길 수 있음
- 바퀴의 둘레가 주행 중 자주 바뀜(탑승자의 무게, 코너링, 바람빠짐, 마찰열로 인한 타이어 팽창 등)

Exteroceptive sensors
- 외부의 움직임을 감지하는 센서
GNSS
Global navigation satellite system
비콘 기반의 위치 추정 센서
다수의 비콘에 대한 통신시간 차이를 이용하여 비콘-로봇의 거리를 구하고, 삼각측량을 통해 Localization 수행
Ego-motion을 추정하기 때문에 proprioceptive sensor 같지만, 외부 비콘을 이용하기 때문에 exteroceptive sensor임
나라마다 시스템이 다르다
- GPS(USA), GLONASS(Russia), BeiDou(China), Gallileo(Europe), KPS(Korea - 2035 목표)
장점
- 싸고 사용하기 쉬움
단점
- 부정확함(10~20m 오차)
- RTK-GPS, DGPS를 사용할 경우 오차는 cm 단위로 내려옴(가격이 억대임)
- 고층빌딩 사이에서 multi-path 문제
- 실내/지하 사용 불가능
- KPS가 아직 없다
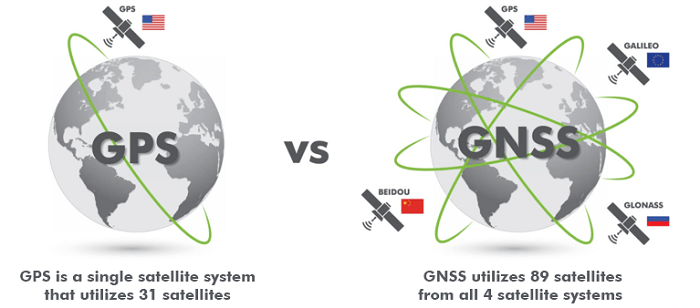
이미지 출처 : https://www.everythingrf.com/community/what-is-the-difference-between-gnss-and-gps_58
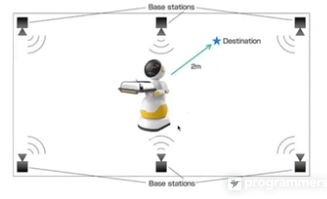
UWB Beacon
GPS와 상당히 유사함
- 사용 환경에 Beacon 설치 + Beacon과의 소통을 통해 위치 추정
장점
- cm 단위의 정밀도로 위치를 추정할 수 있음
- 타 무선 신호로부터의 간섭에 강함
단점
- 특정 재질의 벽에 신호가 막힐 수 있음
- 전력 소모가 높음
- 다수의 수신기를 설치해줘야함
- 장거리에서는 동작이 어려움
Motion capture(Mo-cap)
적외선 레이저와 반사 마커를 이용해 위치를 추정하는 시스템
장점
- mm단위의 고정밀 위치 추정이 가능
- 고성능 시스템의 경우 120+FPS로의 위치 추정이 가능
단점
- 다수의 고가 카메라를 설치해야함
- 특정 각도에서 반사 마커가 가려지는 경우 위치 추정이 어려울 수 있음

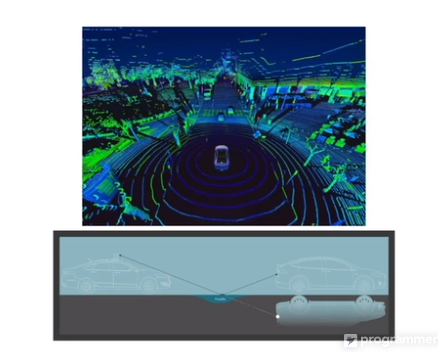
LIDAR(Light detection and ranging sensors)
적외선 레이저를 쏘고 반사 시간을 측정하여 거리를 추정하는 센서
- Time-of-flight(ToF), Phase shift, Frequency modulation 레이저 방식
- Mechanical scanner, Solid state scanner, Flash LIDAR 스캐닝 방식
주변 환경을 3D point cloud 형태로 바로 알 수 있음
장점
- Exteroceptive 센서 중 가장 정확한 편
- 자율 주행을 라이다는 100m 유효거리 가짐
- 빛의 파장이 일어나지 않기 때문에 낮/밤 사용 가능
- 동일한 device로 인한 간섭 제외
단점
- 비싸다
- 카메라에 비해 resolution이 낮음
- 눈/비/안개 등 날씨의 영향을 받음
- Multi-path 문제
- Solid-state LIDAR의 경우 여러 방향으로 탑재 필요
- 동일한 제품군의 라이다 레이저가 겹치면 문제 발생
- 가까운 거리의 물체의 밀도는 높게 멀리있는 물체의 밀도는 낮게 나와 알고리즘 설계 어려움
- 고여있는 물웅덩이나 반사판에 의해 잘못된 측정 가능
RADAR(Radio detection and ranging sensor)
반사되어 돌아오는 전파를 측정하여 radial 거리를 재는 센서
Doppler 효과를 이용해 이동중인 물체의 속도 추정 가능
전파의 종류를 바꿈으로써 near-range와 far-range 선택 가능
장점
- 날씨 영향 X
- 타 센서에서는 얻지 못하는 속도 값 추정 가능
- 에러들만 처리해주면 아주 좋은 센서
단점
- 작은 물체들은 detection 실패
- LIDAR 보다 낮은 resolution
- Multi-path 문제

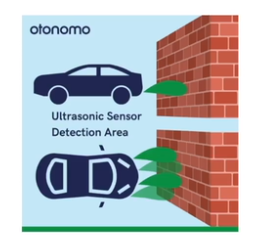
Ultrasound
초음파를 이용 - RADAR와 동일
장점
- 저렴함
- Near-range에서 잘 적용됨
단점
- 물체의 형태를 잘 추정하지 못함
- 그렇기 때문에 Distance 센서로 활용
- 노이즈가 많다
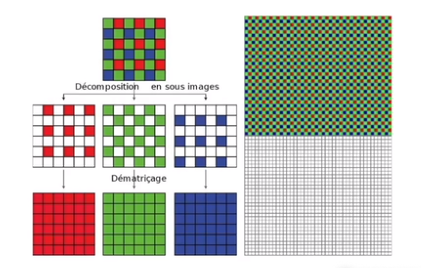
Camera
광센서를 이용해 빛 신호를 받고, debayering 프로세스를 통해 RGB 색 재구성
장점
- 저렴함
- 좋은 성능 - Dense data, Texture, Color, High-FPS
- 렌즈 교환을 통해 시야각 연장 가능
- 사람이 보는 시야와 가장 유사함
- 시각화를 하기 가장 좋은 데이터이다
단점
- Depth 정보 소실
- 조명 영향
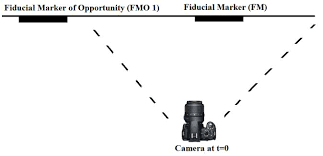
Camera + Fiducial Marker(인위적으로 만든 패턴 마커)
Fiducial marker를 바라보고 있을 때, 카메라의 위치를 추정하는 방법
- Fiducial marker의 크기를 알고 있어야 함
장점
- 저렴함
- 증강현실(로보틱스 용도)로 쓰기 적합
단점
- 다수의 Fiducial marker를 설치/관리 해야함
- 조명의 영향을 받음
- 외부적인 요인에 의해 Marker가 훼손 될 수 있음
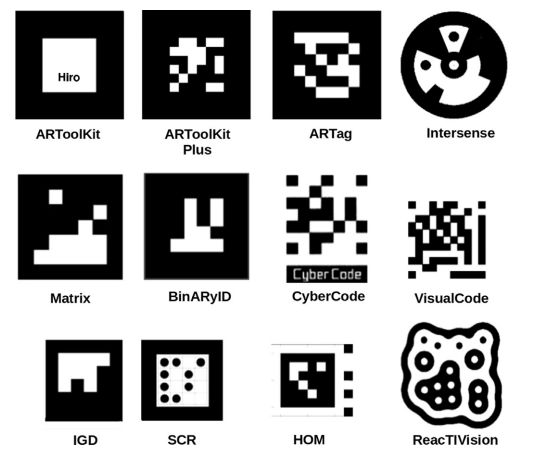
이미지 출처 : https://www.tangramvision.com/blog/reverse-engineering-fiducial-markers-for-perception
적외선 Camera + Reflective marker
천장에 부착된 반서 마커를 바라보고 있을 때, 적외선 카메라의 위치를 추정하는 방법
- 적외선은 IR emitter을 통해 방출함
- 서빙로봇에서 많이 사용됨
장점
- 조명 변화에 민감
- 증강현실(로보틱스 용도)로 쓰기 적합함
단점
- 다수의 Fiducial marker를 설치/관리 해야함
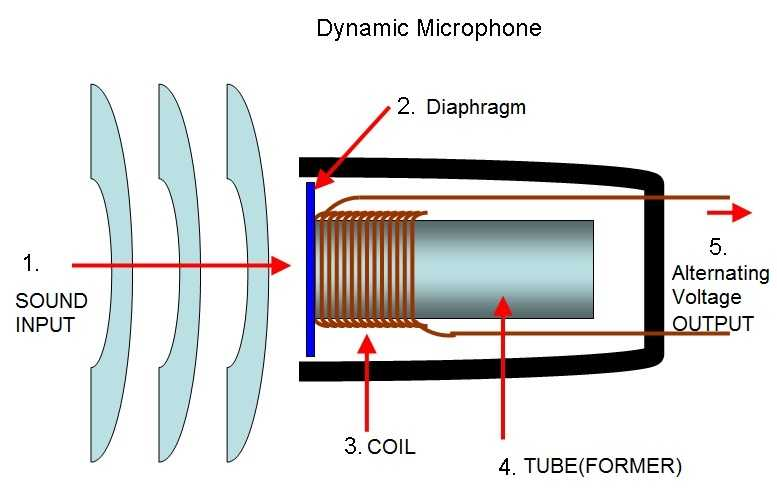
Microphones
공기의 진동을 transducer 센서를 통해 전기 신호로 변환하는 센서
여러개의 마이크를 통해 소리의 근원에 대한 위치를 계산 가능
장점
- 유일하게 소리 정보를 사용하는 센서
- 저렴한 가격
단점
- Geometry가 부정확함(위치 추정이 쉽지 않음)
- 잡음이 심함
- 사용자가 없음