기준에는 NVIDIA JETSON시리즈 사용을 고려했는데 운이 좋게 라즈베리파이 4B 한대를 받아 라즈베리파이 4B 2대로 작품을 만들기로 했다.
이 HW카테 고리는 작업하면서 하드웨어에 추가되는 부분이 있을 시에 더 작성할 예정이다.
🔩부품 준비
우선 차체의 조향은 다루기 쉬운 MG-996R 서보모터로 선택했으며 동력을 담당할 모터는 가성비 있는 구성하기로 결정했다.
구글링을 통해 이 구성과 비슷한 RC 키트를 찾았다. 국내에는 한곳에서 밖에 팔지 않는것 같았고 그곳에서 키트를 구매하였다.
(수정) 몇 더 발견하였다.
이래는 키트 부품과 준비한 부품의 리스트이다.
- MG-996R (서보 모터)
- GA25-370 (모터)
- L298n (모터 드라이버)
- 라즈베리파이 4B 4GB * 2
- 라즈베리파이 카메라 V1, V2
- 9V, 6V배터리 및 커버
- 미니 브레드 보드
- 5V출력 보조배터리
🛠️부품 조립
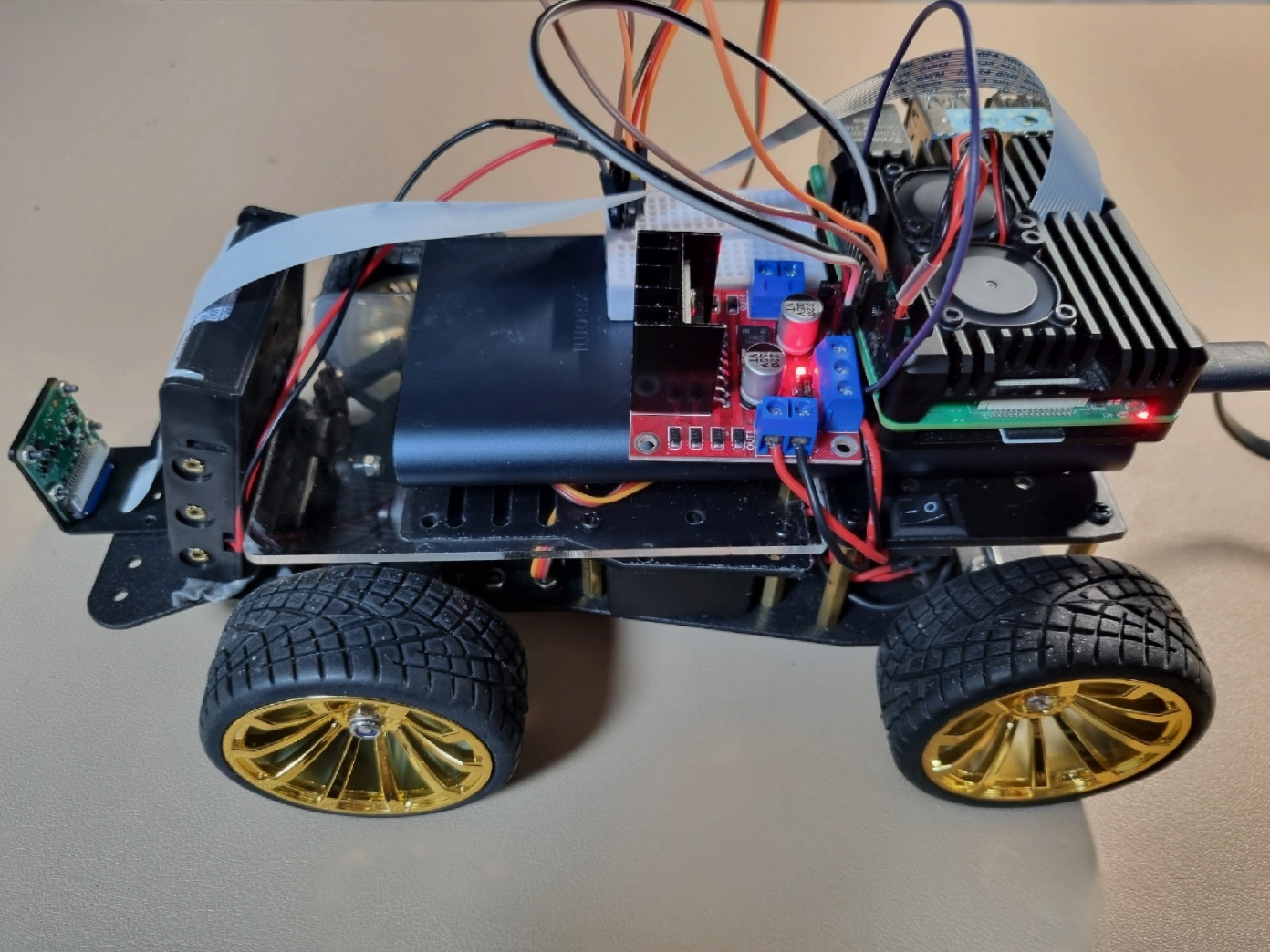
조립은 대락 2시간 정도 걸렸다. 생각 했던것 보다 RC키트의 크기가 작아서 공간이 협소했다. (아크릴은 갈아냄) 떄문에 나중에 재 조립을 염두해 두고 라즈베리파이 한대는 조립하지 않았다.
9V 전지는 스위치를 통해 모터드라이버에 연결해주었고 6V 전지는 바로 서보모터에 물려주었다.
다만 아 조립상태에는 다음과 같은 애로 사항이예상된다.
1. 서보모터와 DC모터의 전압공급과 전류공급이 충분하지 않을수 있다.
건전지로 전원공급을 하다보니 사용하면 할 수록 전압은 낮아질 것이고 이는 곧 작동 이상으로 나올 수 있다.
2. 무게
조립을 다 하고 난 후 무게를 제보니 1.5kg 정도가 나왔다. 그렇게 무거운 무거운 무게는 아니지만 추후게 여러 장비를 더 달게되면 모터의 토크이상이 되어 버릴 수도있다. 현재 목표는 2kg이내로 작품을 완성하는 것이다.
이 외에는 큰 걱정거리가 없지만 작업을 하면서 문제가 돠는 부분은 바로바로 수정하면서 진행할 예정이다.
🚗작동확인 테스트
처음 서보 모터를 90도로 세팅하고 조립했기 떄문에 기준점을 90도로 잡고 각도 조절을 하였다.
우회전은 120도 좌회전은 60도로 설정하고 세팅하였다.
코드는 SW #1편 참고
코드를 작성하고 테스트 해본 결과 바로 위에 서술한 문제가 발생했다.
서보모터를 조향하는데는 기타 사항이 없었지만 DC모터의 파워가 심각하게 낮았다.
9V 전지를 연결하였지만 모터는 4V로 출력되고 있었다!!!
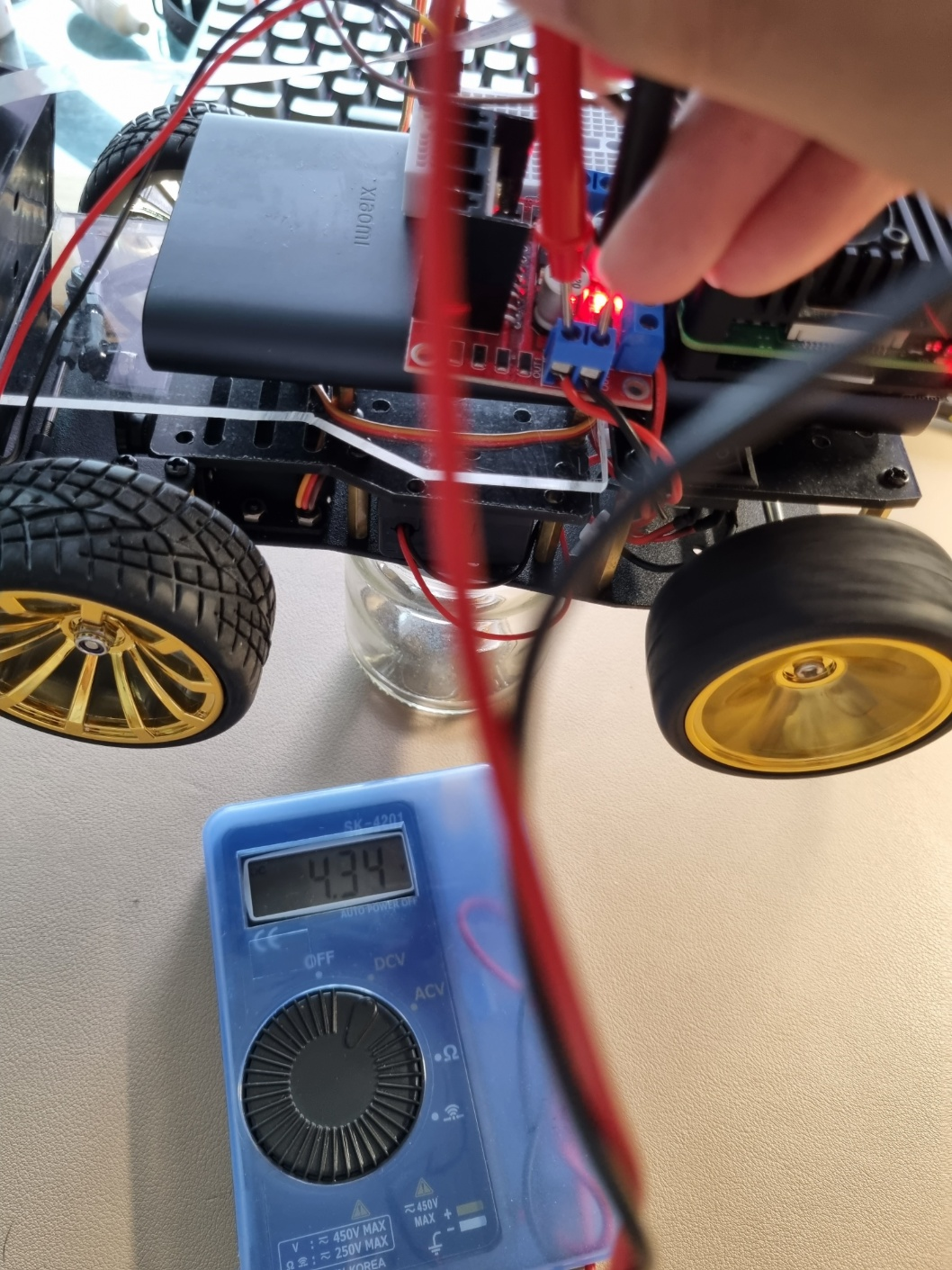
9V전지를 분리해 확인해본결과 전지는 정상적으로 9V가 측정되었다.
아마도 전류가 부족해서 그런것 같다...
우선은 본 상태에서도 작동은 가능하고 테스트도 가능하기 때문에 추후에 수정 할 예정이다.
다음 HW포스트는 아마 전원문제 해결에 대해 작성할 것 같다.