[Paper Review] ORBIT: A Unified Simulation Framework for Interactive Robot Learning Environments
Paper Review
https://isaac-orbit.github.io/
Abstract
본 논문은 Nvidia의 Isaac Sim에서 동작하는 robot learning을 위한 프레임워크인 ORBIT을 제시하고 있습니다. photo realistic하고 빠르고 정확한 데이터를 얻어낼 수 있습니다. fixed arm, mobile manipulator등 여러가지 장치들을 포함하고 있으며 GPU 가속도 지원하는 프레임워크입니다. Representaiton learning, RL, imitation learning, and task&motion planning등 여러 가지 학습에 적용이 가능합니다.
Introduction
ML의 발전 이후 robotics 분야에서도 ML을 사용한 연구가 급증하고 또 좋은 성과를 거두고 있습니다. 특히 RL은 quadrupedal(사족보행) 제어에 매우 뛰어난 성능을 보여주고 있습니다. 하지만 learning based의 방법론들은 수많은 데이터를 필요로 하고 많은 돈과 노력이 요구됩니다. 이에 대한 대안으로 simultaion이 대두되었습니다. 기존의 방법들은 모두 trade off가 존재하고 대표적으로 Isaac Gym의 경우에도 physically based rendering을 지원하지 않습니다. ORBIT은 오픈소스 프레임워크이며 앞의 문제들을 해결하여 빠르고 정확합니다.
Related Work
- Physics Engine
물리 엔진을 사용하는 이유는 contact dynamics를 향상시키고 collision handling을 하고, deformable bodies를 처리하고, throughput을 증가시키기 위해서입니다. 이전의 프레임워크들은 MuJoCo나 Bullet으로 rigid object manipulation에 사용되었습니다. 이들은 cpu based였습니다. deformable bodies를 위해서는 Bullet이나 FleX(particle based dynamics)를 사용하였습니다.(rigid에 비해 tool 부족) ORBIT은 둘 다를 지원하며 PhysX를 사용하며 GPU 가속을 지원합니다. - Sensor simulation
기존의 방식들은 대부분 resterization을 사용하여 object의 texture를 표현합니다. 최근의 기술들은 ray의 interaction을 simulate하여 transparency와 reflection을 표현합니다. 이러한 기술들이 sim to real의 gap을 줄여줍니다. 기존의 방식들은 rgb 혹은 depth 카메라 기능을 서포트 하는데 LiDAR 같이 range sensor를 사용하기에는 부족합니다. ORBIT은 Isaac sim의 ray tracing기능을 통해 이를 구현하고 추가적 정보를 얻을 수 있는 API를 제공합니다. - Scene desiging and asset handling
Mesh scan을 통해 많은 양의 데이터를 만드는데 용이합니다. 하지만 geometric artifact 문제와 lighting 문제가 있습니다. 본 논문에서는 graphical interface를 사용하고 다른 dataset으로의 importing을 지원합니다.
ORBIT: Abstractions and Interfaces Design
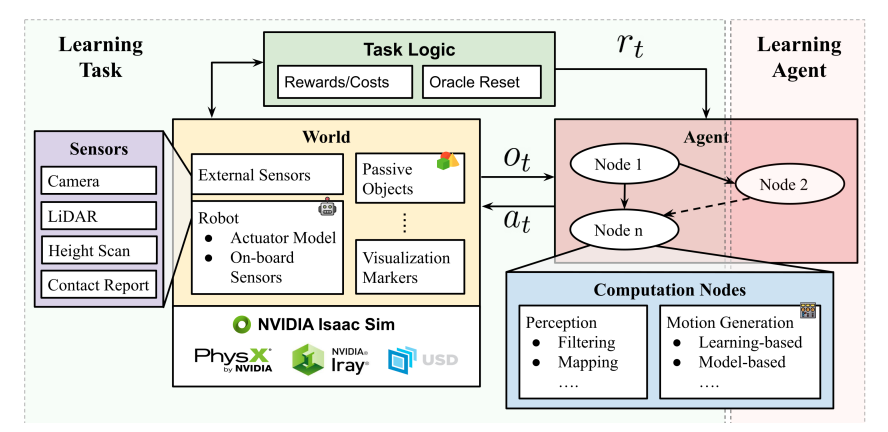
simulation에서는 perception과 motion generation이 동시에 일어난다고 간주하지만 실제에서는 sensor별로도 다른 frequency를 가지고 action도 다른 time scale, 여러 delay나 noise 역시 발생합니다. 이를 고려하여 본 프레이무어크에서는 각 다른 actuator와 noise 적용이 가능합니다.
- World
world는 scanned mesh로 구성되고 game based gui로 되어있습니다. (scanned mesh에 object를 추가합니다) 로봇의 경우는 USD 파일로 추가가 가능합니다. - Agent
decision making 과정으로 본 논문에서는 perception based와 action based 2가지 타입으로 나눠서 고려합니다. - Learning task and agent
separate module로 활용하기 때문에 같은 world를 다른 task에 사용하는 것이 가능합니다.
ORBIT: Features
간단히 요약하면 결국 다양한 타입을 realistic하게 잘 제공한다는 내용입니다.
Exemplar Workflows with Orbit
RL, Teleoperation & imitaiton learning, Motion planning, deployment on real robot에 나눠서 본 프레임워크가 뛰어남을 보이고 있습니다.

아주 유용한 정보 감사드립니다.