로봇의 스팩을 보면서 반복정밀도 및 도발 범위의 정의가 궁금해서 정리겸 적어봄...
1) 반복 정밀도(Repeatability, 반복 위치정밀도)
-
뜻: 같은 목표 위치로 여러 번 이동했을 때, 그 위치에 “얼마나 비슷하게” 다시 도착하느냐
-
쉽게 말해: “매번 찍는 점이 얼마나 한곳에 모이냐”
-
보통 표기: ±0.02 mm 같은 형태
-
중요한 포인트:
- “절대적으로 정확한 위치”가 아니라 ‘재현성’이 핵심
- 예: 목표점이 실제로는 0.5mm 옆에 찍혀도, 매번 그 0.5mm 옆에 똑같이 찍히면 반복정밀도는 좋다
2) 도달 범위(Reach) / 작업 범위(Working Range, Envelope)
-
뜻: 로봇이 팔을 뻗어서 도달할 수 있는 최대 거리, 혹은 움직일 수 있는 공간(3D 영역)
-
쉽게 말해: “로봇이 어디까지 손이 닿나”
-
보통 표기:
- Reach: 900 mm 같은 “거리”
- Working envelope: “반경/높이/각도 제한” 포함한 가능 작업 공간
3) 차이점 한 줄 요약
- 반복 정밀도 = 같은 곳을 얼마나 똑같이 다시 찍나 (품질/정밀)
- 도달 범위 = 어디까지 갈 수 있나 (작업 가능 영역/크기)
4) 현장 감각 예시
- Reach 900mm: “작업대 끝까지 팔이 닿는다”
- Repeatability ±0.02mm: “그 위치를 100번 찍어도 흔들림이 매우 작다 → 조립/삽입(끼워넣기) 같은 정밀 작업에 유리”
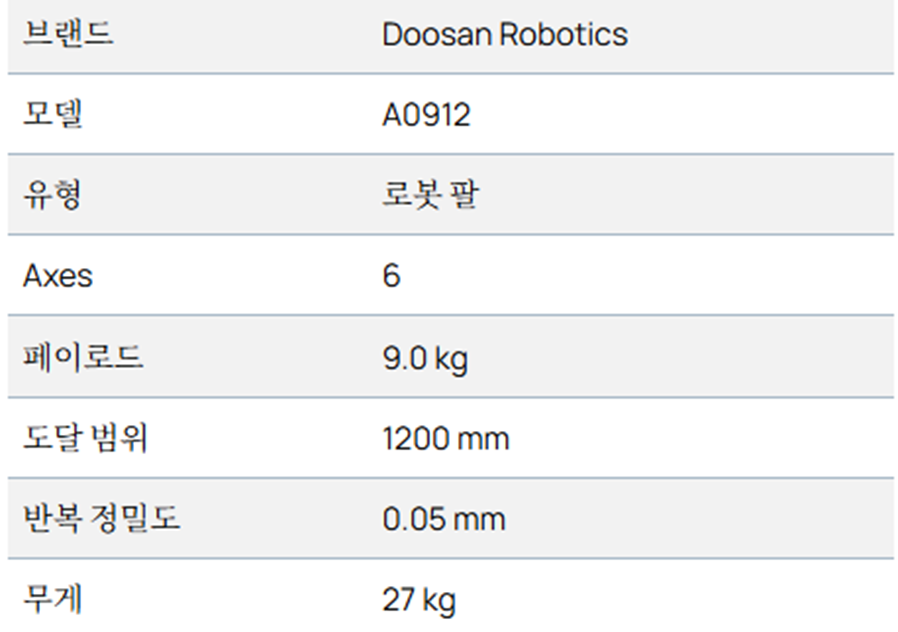
원하면 너가 보는 로봇 스펙 표(예: Doosan, Dobot 등)에서 반복정밀도 수치랑 Reach 수치를 같이 적어주면, 그 수치가 실제 작업(픽앤플레이스/조립/나사/접촉작업)에서 어떤 의미인지 바로 해석해줄게.

Like it, and it will be the best.