
Traditional Image Segmentation 기술
Image segmentation 모델에 적용된 객체 인식 및 위치 파악 기술은 특정 application이나 세그먼트화할 이미지 유형에 따라 달라짐.
1. Threshold Method
: 임계값에 따라 이미지를 객체와 배경의 두 영역으로 나누는 기술. 이미지가 binary map으로 변환
- 객체와 배경의 대비가 높은 이미지에 적합
- image binarization에 자주 사용되므로 binary image에서만 작동하는 contour detection 및 identification과 같은 추가 알고리즘 사용 가능
- Otsu's Threshold, Mean shift
| 원본 image | threshold image |
|---|---|
 |  |
2. Region Based Method
: 인접한 픽셀 간의 유사성(비슷한 속성)을 찾아 공통 클래스로 그룹화하여 작동
- 일반적인 segmentatation procedure은 일부 pixels에 대하여 seed pixel로 설정하고, 해당 알고리즘은 seed pixel들의 immediate boundaries를 감지하여 similar or dissimilar를 분류
- immediate neighbors는 시드로 처리되고 전체 이미지가 segment화될 때까지 반복 ex. watershed algorithm
- Watershed Based Method가 euclidean distance map의 로컬 최대값에서 시작해 2개의 seed(시작 픽셀)가 동일한 지역 또는 segment에 속하는 것으로 분류될 수 없다는 제약 조건이 있다는 점에서 유사
- 다양한 특징을 가진 이미지에 적합
- 큰 이미지의 경우 느린 속도
- Region Growing, Region Split and Merge
3. Edge Based Method
: Edge detection. 이미지에서 어떤 픽셀이 edge 픽셀인지 분류(차이가 나는 부분에 집중)하고 그에 따라 별도의 클래스에 따라 해당 edge 픽셀을 골라내는 작업
- 대비가 낮은 이미지에 적합
- 노이즈에 민감
- Canny, Gradient, Laplacian

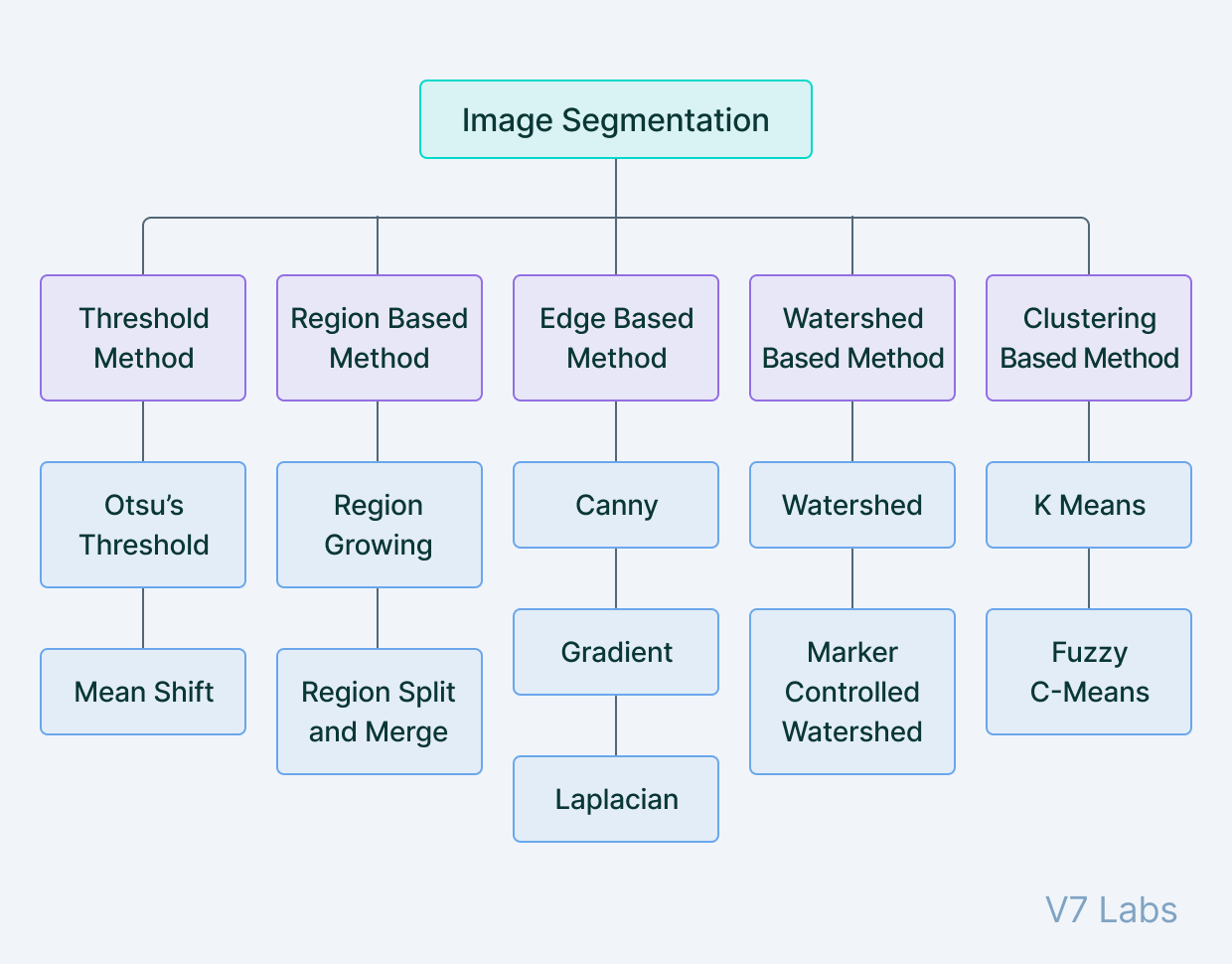
4. Watershed Based Method
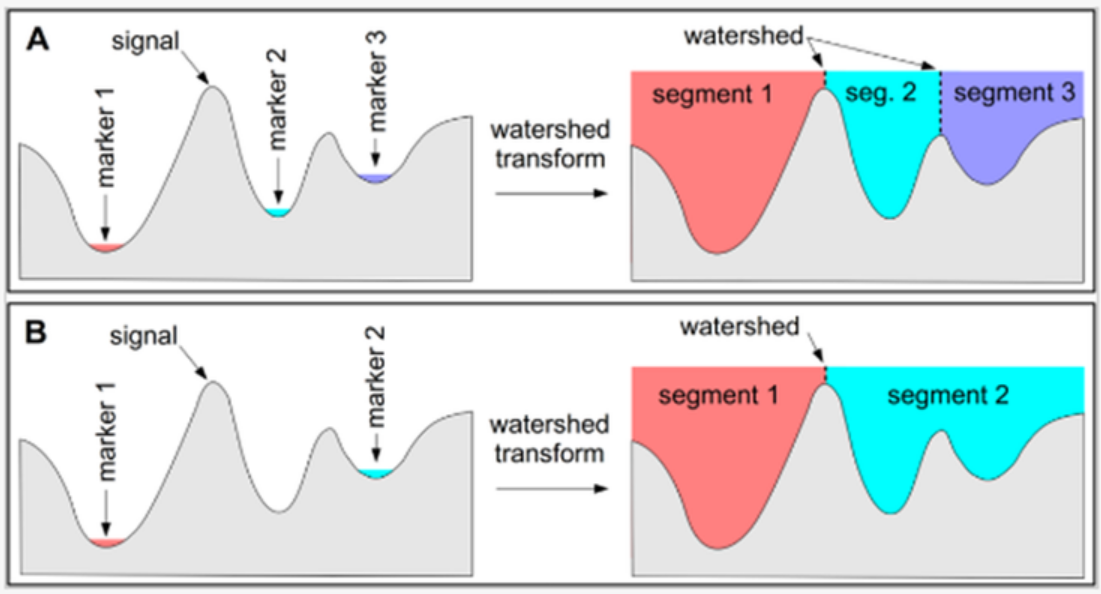
: 이미지에서 gradient의 크기로 구성된 gradient magnitude 영상을 구하고, 그 영상으로부터 Watershed(산의 봉우리, peak)를 구해 그 Watershed를 영역을 구분해주는 역할로 이용, 이미지를 segement화하는 방식
- 영상에 존재하는 detail이나 노이즈로 인해 gradient를 구했을 때 local minimus을 만들어내기 때문에 자연 영상에 대부분 over-segmentation 문제가 발생
- marker를 사용해 segmentation될 영역을 지정.(보통 최종적으로 segmentation되는 영역의 수 == marker의 수)
- Watershed, Marker Controlled Watershed
5. Clustering Based Method
: 최신 image segementation에서 일반적으로 가장 많이 쓰이는 것은 Clustering algorithm. 공통 속성을 가진 픽셀을 특정 segment에 속하는 것으로 함께 clustering하여 작동되는 unsupervised 알고리즘
- 시드 픽셀로 시작한 다음 유사성 기준에 따라 해당 픽셀을 중심으로 영역 확장
- 개체가 많은 이미지에 적합
- 계산 비용이 많이 들 수 있음
- K Means, Fuzzy C-Means
6. Deep Learning Based Method
: 머신러닝 알고리즘을 사용해 이미지에 있는 물체의 특징을 학습한 뒤, 알고리즘을 사용하여 세그먼트를 객체 또는 배경으로 분류
- 다양한 특징을 가진 이미지에 적합
- 많은 양의 학습 데이터 필요
Deep Learning Based Method
1. FCN(Fully Convolutional networks)
-
Semantic Segmentation의 대표적인 모델
-
기존 Classification용 CNN 모델의 문제
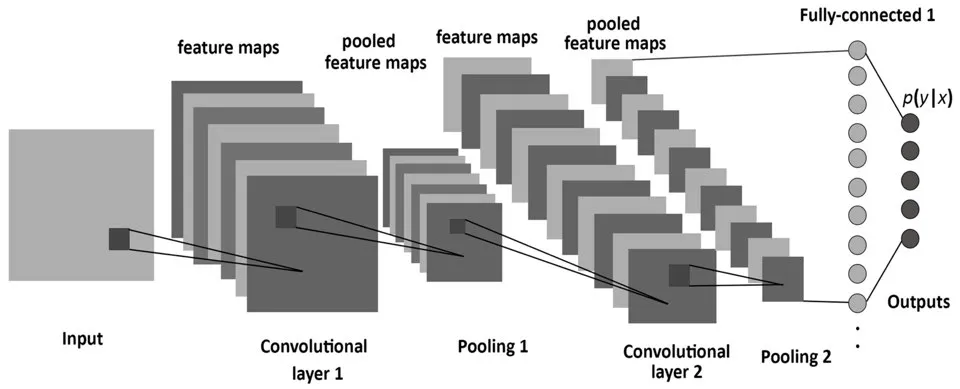
- AlexNet, VGG 등 분류에 자주 쓰이는 깊은 신경망들은 Semantic Segmentation에 부적합하다. 일반적으로 convolution 층들과 fully connected 층들로 이루어져 있으므로 항상 input image를 신경망에 맞는 고정된 사이즈로 작게 만들어 입력해줘야 한다.
- 분류용 CNN 모델들은 물체가 어떤 클래스에 속하는지 예측해낼 수 있으나 parmeter과 차원을 줄이는 layer를 갖고 있어 자세한 위치정보를 잃게될 수 있다.(마지막에 쓰이는 fully connected layer에 의해 물체가 어디에 존쟇는지 예측할 수 없게 됨)
- Pooling과 Fully connected layer를 없애고 stride와 padding을 1로 설정해 일정한 Convolution을 진행한다면 input의 차원은 보존할 수 있으나 parameter의 개수가 많아져 메모리 문제나 계산비용이 과다해진다.
- AlexNet, VGG 등 분류에 자주 쓰이는 깊은 신경망들은 Semantic Segmentation에 부적합하다. 일반적으로 convolution 층들과 fully connected 층들로 이루어져 있으므로 항상 input image를 신경망에 맞는 고정된 사이즈로 작게 만들어 입력해줘야 한다.
-
FCN 모델
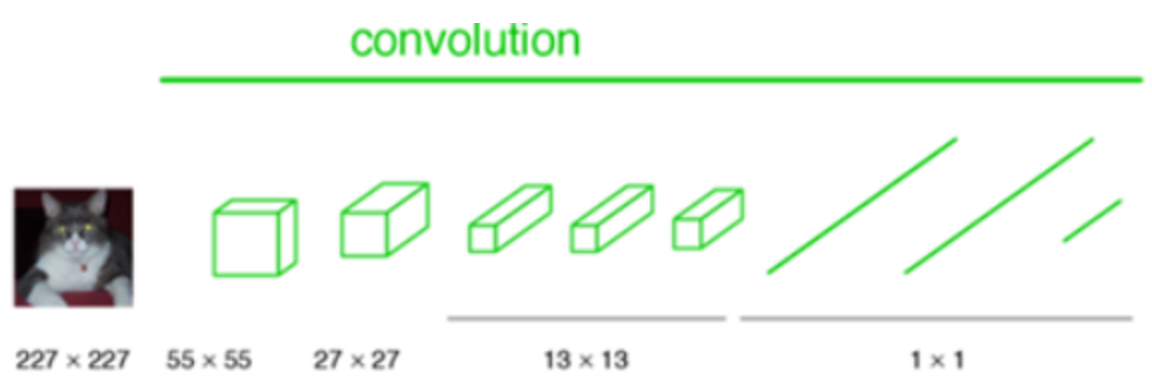
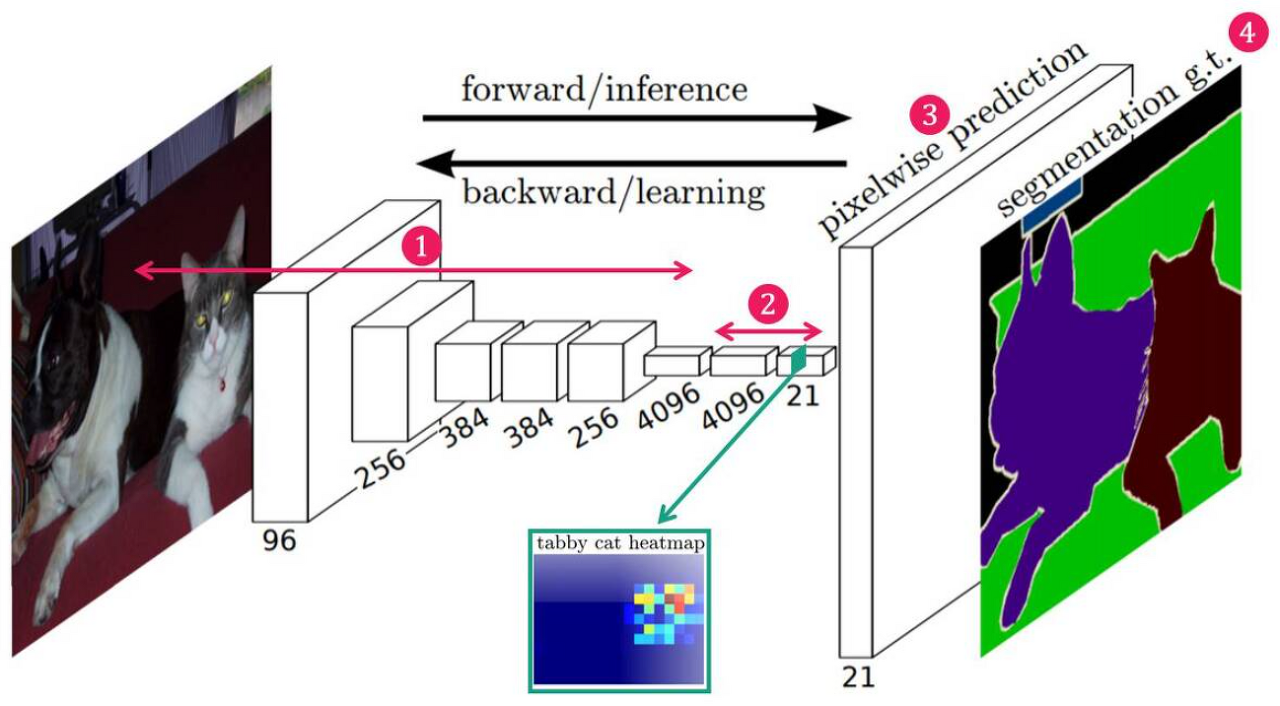
- Fully connected layer를 1x1 convolution 층으로 바꿈
- 네트워크 전체가 convolution 층들로 이루어지고, fully connected 층들이 없어졌으므로 입력 이미지 크기에 제한을 받지 않는다.
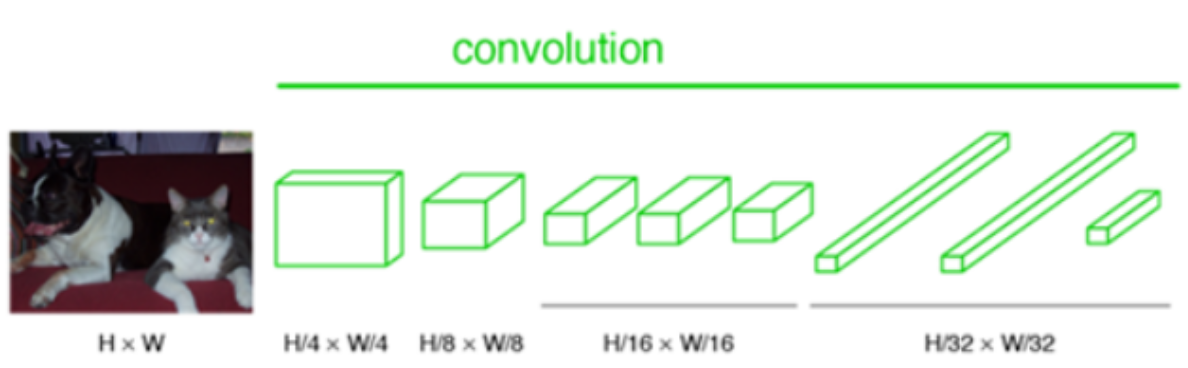
- 여러 층의 convolution 층들을 거치고 나면 feature map의 크기가 H/32xW/32가 되는데, 그 특성맵의 한 픽셀이 입력이미지의 32x32 크기를 대표
➡ 입력이미지의 위치 정보를 '대략적으로' 유지 - convolution 층들을 거치고 나서 얻게 된 마지막 특성맵의 개수 == 훈련된 클래스의 개수
- 5개의 클래스로 훈련된 신경망이라면 5개의 특성맵(heatmap)을 산출
- 각 heatmap은 하나의 클래스를 대표
- 고양이 클래스에 대한 heatmap인 경우, 고양이가 있는 위치의 픽셀값들이 높음
- Fully connected layer를 1x1 convolution 층으로 바꿈
-
FCN 모델의 Architecture
- Convolution Layer를 통해 Feature 추출
- 1x1 Convolution Layer를 통해, 낮은 해상도의 Class Presence Heat Map 추출
- Transposed Convolution을 통해 낮은 해상도의 heatmap을 Upsampling한 뒤, input과 같은 크기의 Map 생성
- Map의 각 pixel class에 따라 색칠한 뒤, Segmentation 결과 반환
- 1,2번 과정은 downsampling 단계로, convolution을 통해 차원을 축소한다.
- 3번 과정은 upsampling 단계로, 1,2번 과정을 통해 만들어진 heatmap의 크기를 원래 이미지의 크기로 다시 복원해주는 단계
- 이미지의 모든 픽셀에 대해 클래스를 예측하는 것이 semantic segmentation의 목적이므로)
- 4번 과정은 upsampling된 heatmap을 종합해 최종적인 segmentation map을 만드는 단계
- 각 픽셀당 확률이 가장 높은 클래스를 선정
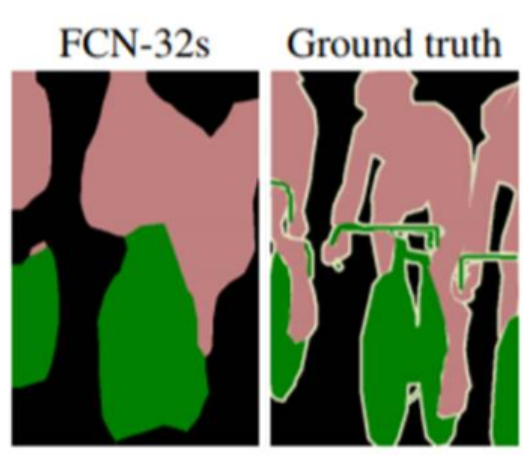
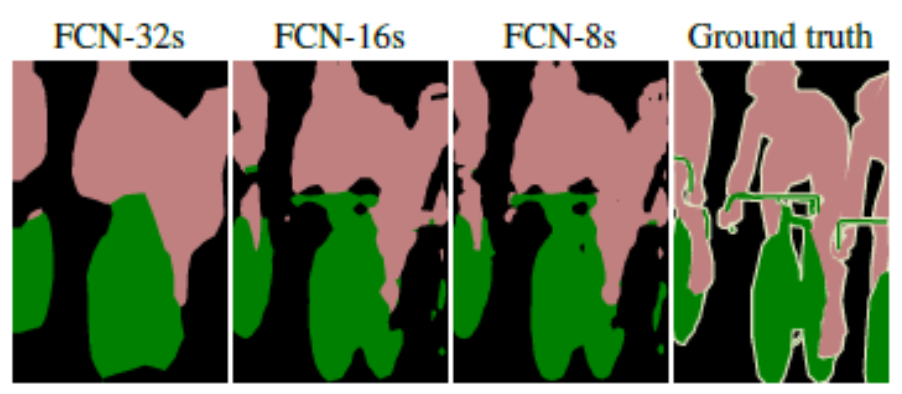
- 단순히 upsampling 시 원래 이미지 크기의 segmenation map을 얻을 수는 있으나 디테일하지 못함. 뭉뚱그려져 있고 디테일하지 못함. 한 번에 32배 upsampling하는 방법을 FCN-32s라고 함.

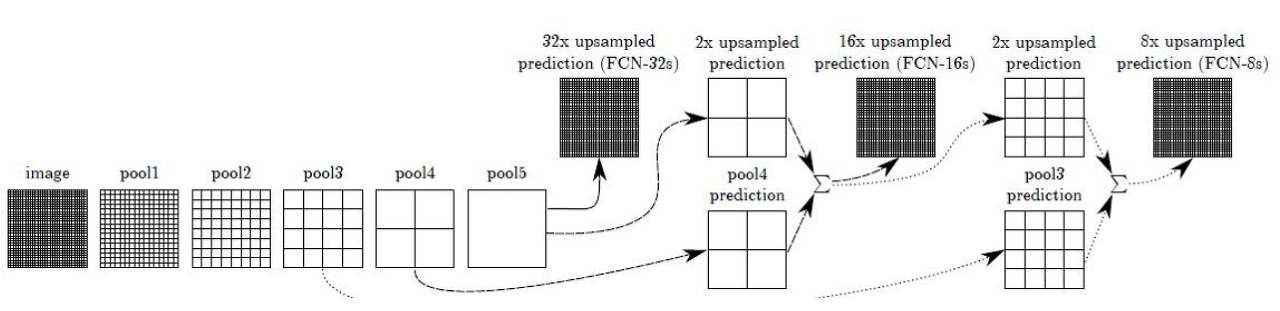
- Skip combining 기법
: convolution과 pooling 단계로 이루어진 이전 단계의 컨볼루션층들의 특성 맵을 참고하여 upsampling 시 좀더 정확도를 높일 수 있음(이전 컨볼루션층들의 특성맵들이 더 높은 해상도를 갖고 있으므로)- 전전 단계의 특성맵(pool3)과 전 단계의 특성맵(pool4)을 2배 upsampling한 것과 현 단계의 특성맵(conv7)d을 4배한 것을 모두 더한 다음에 (pool3 + 2xpool4 + 4xcon7)을 8배 upsampling을 해 얻은 특성맵들로 segmentation map을 얻는 방법을 FCN-8s라고 함. ➡ 일반적으로 사용되는 방법
2. U-Net
-
Semantic Segementation Task 수행에 널리 쓰이는 모델 중 하나로, 의학 이미지 Segmentation을 위해 개발된 U 형태의 모델이다.
-
U-Net의 장점
- 빠른 속도
- 이미지를 인식하는 단위(Patch)에 대한 Overlap 비율이 적음
- 기존의 모델에서 많이 사용되었던 Sliding Window 방식은 이전 Patch에서 검증이 끝난 부분을 다음 Patch에서 다시 검증하여 연산을 낭비하지만, U-Net에서는 이전 Patch에서 검증이 끝난 부분을 다음 Patch에서 중복하여 검증하지 않으므로 느린 연산 속도가 개선됨
- Context와 Localization의 늪에서 탈출
- Segmentation Network는 클래스 분류를 위한 인접 문맥 파악(Context)과 객체의 위치 판단(Localization)을 동시에 수행해야 한다.
- 각 성능은 Patch의 크기에 영향을 받는데, 이 때 Trade-off(모순되는 관계)를 갖게 됨
➡ Patch의 크기가 커지면 더 넓은 범위의 의미지를 한번에 인식할 수 있어 Context파악에는 탁월한 효과를 보이나, 많은 Max-Pooling을 거치며 Localization 성능이 저하됨
➡ Patch의 크기가 작아지면 Localization 성능은 좋아지나, 인식하는 범위가 지나치게 협소해져 Context 파악 성능이 저하됨
➡ U-Net은 다층의 Layer의 Output을 동시에 검증해 이러한 모순적 관계를 극복함!
- 빠른 속도
-
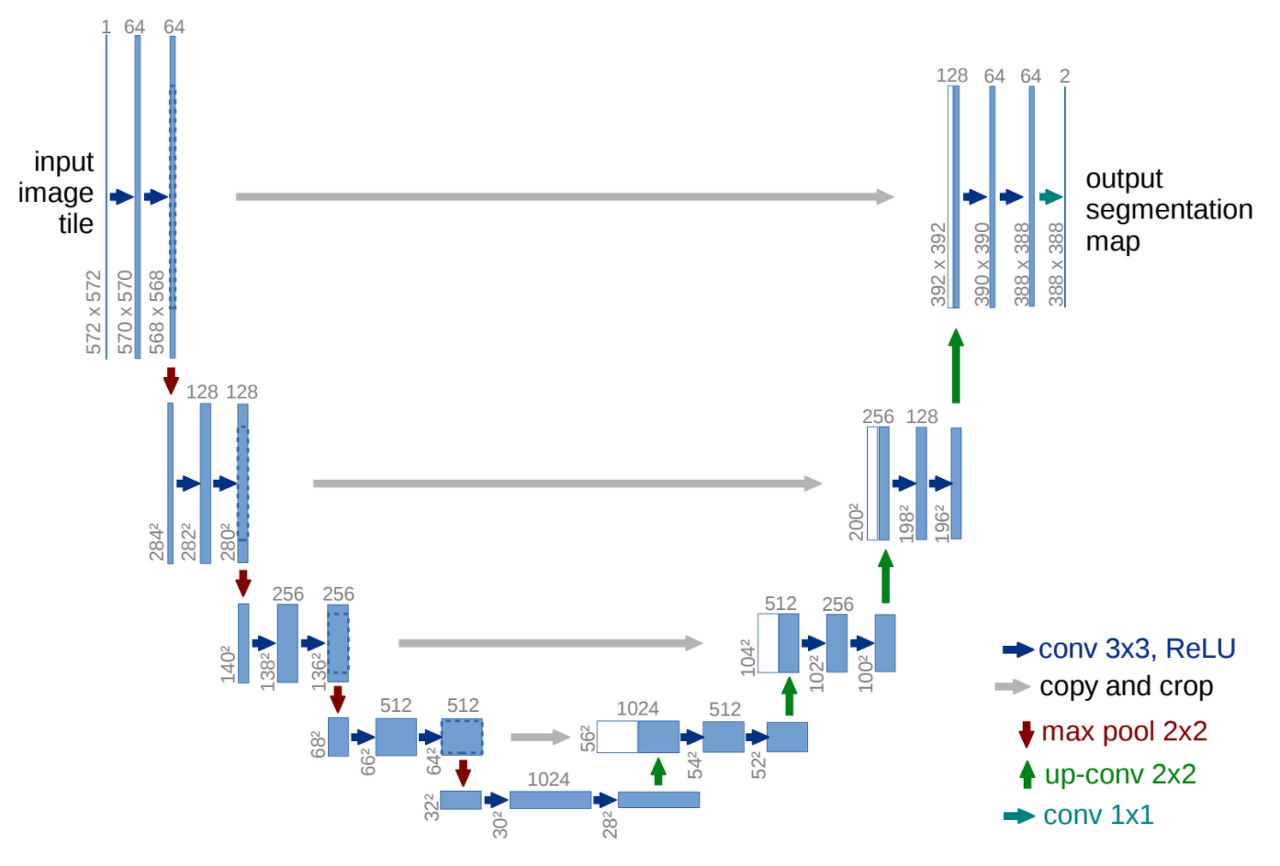
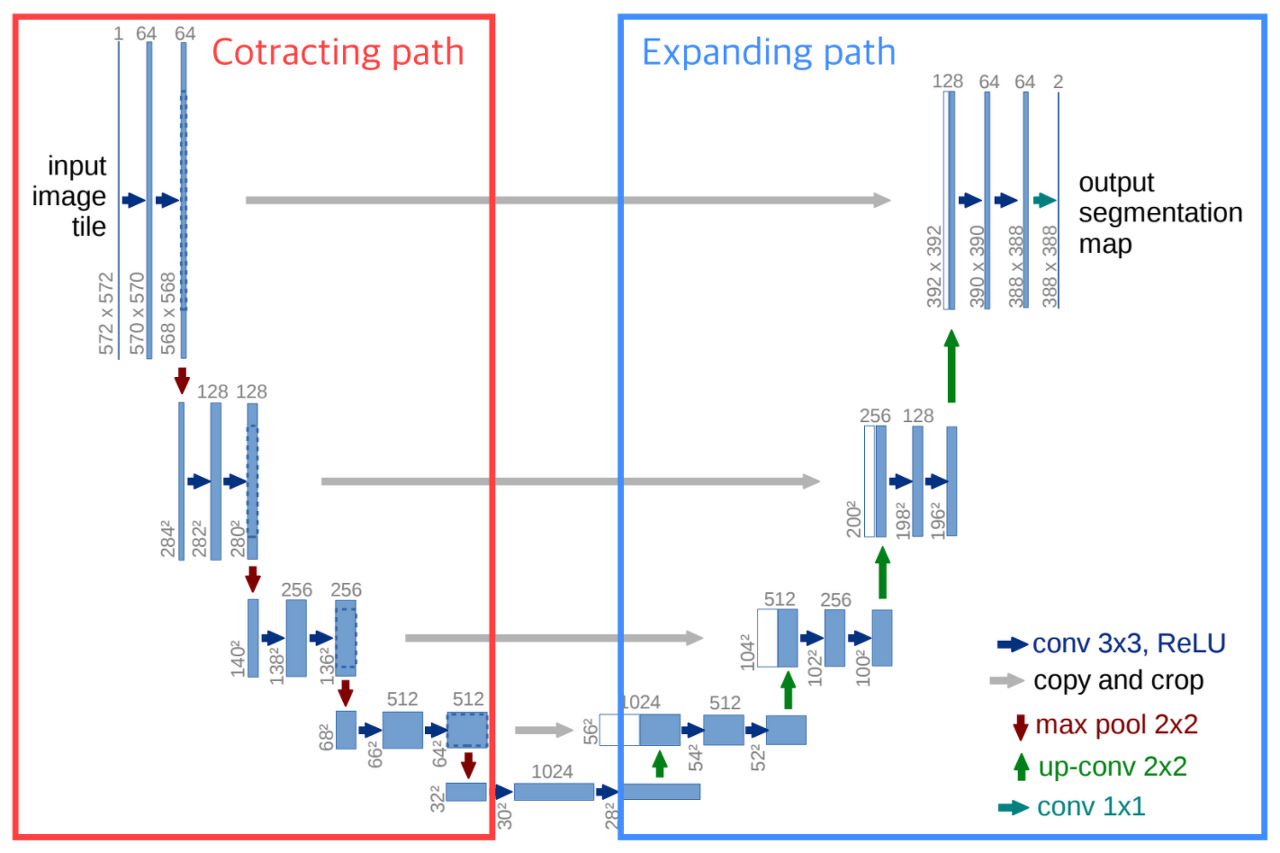
U-Net 모델의 Architecture
- 알파벳 U 형태 구조의 왼쪽 절반에 해당하는 Contracting Path와 오른쪽 절반에 해당하는 Expanding Path의 2가지로 분리됨
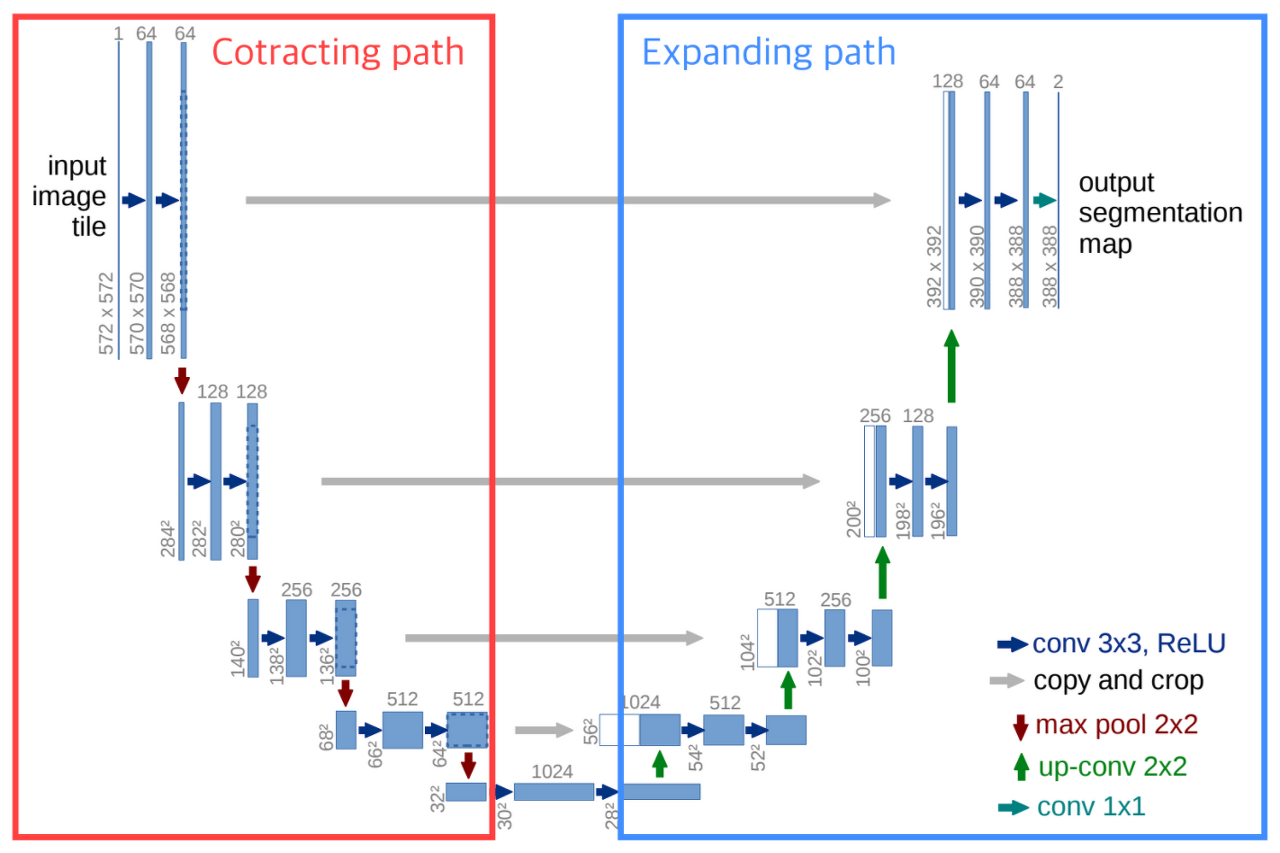
- Contracting Path
- Encoder의 역할을 수행하는 부분으로, 전형적인 Convolution Network로 구성
- 입력을 Feature Map으로 변형해 이미지의 Context를 파악
- 점진적으로 Spatial dimension을 줄여가며 고차원의 semantic 정보를 convolution filter가 추출해낼 수 있게 됨
- Contracting Path의 앞단에 이미 잘 학습된 모델을 Backbone으로 사용해 학습 효율과 성능을 높일 수 있으며, 주로 ResNet 등의 모델을 사용함.
- Expanding Path
- Decoder의 역할을 수행하는 부분으로, 전형적인 Upsampling + Convolution Network로 구성
- Convolution 연산을 거치기 전, Contracting Path에서 줄어든 사이즈를 다시 복원(Upsampling)하는 형태
- Expanding Path에서는 Contracting을 통해 얻은 Feature Map을 Upsampling하고, 각 Expanding 단계에 대응되는 Contracting 단계에서의 Feature Map과 결합해서(Skip-Connection Concatenate) 더 정확한 Localization을 수행
- encoder에서 spatial dimension 축소로 인해 손실된 spatial 정보를 점진적으로 복원하여 정교한 boundary segmentation을 완성
- Multi-Scale Object Segmentation을 위해 DownSampling과 UpSampling을 순서대로 반복하는 구조
- U-Net이 다른 encoder-encoder-decoder 구조와 다른 점은 회색 선!
➡ Spatial 정보를 복원하는 과정에서 feature map 중 동일한 크기를 지닌 feature map을 가져와 prior로 활용
➡ 더 정확한 boundary segmentation이 가능해짐
- 알파벳 U 형태 구조의 왼쪽 절반에 해당하는 Contracting Path와 오른쪽 절반에 해당하는 Expanding Path의 2가지로 분리됨
3. SegNet
- U-Net과 마찬가지로 FCN의 구조를 이용한(Encoder-Decoder 유형의 구조) Image Segmentation 모델이다.
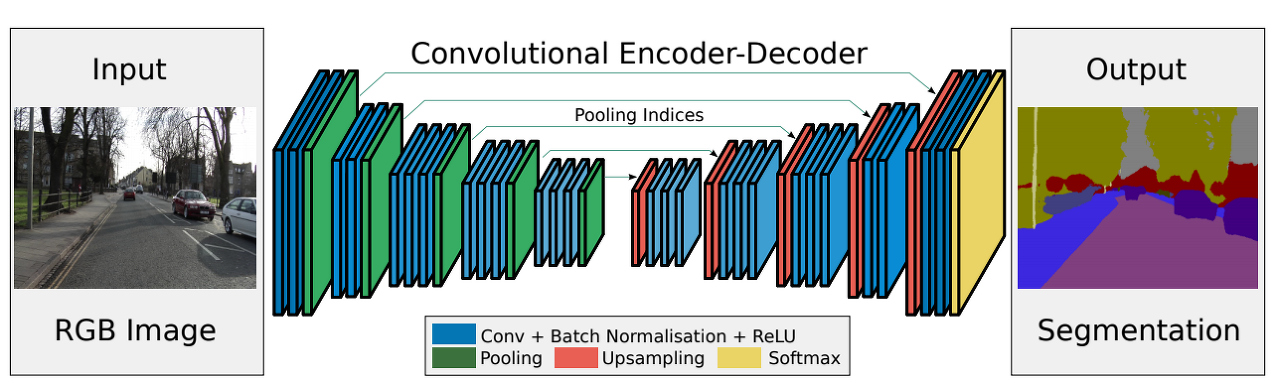
- Encoder에서는 VGG16의 13개 Convolution Layer를 동일하게 사용한다. Convolution, Pooling 구조들을 통해 Input Image의 feature map을 추출한다.
- Decoder에서는 Encoder에서 뽑은 feature map을 Upsampling과 Convolution하여 원래 크기로 되돌린다. Upsampling 후 마지막 Layer에서는 각 Class의 픽셀 단위 분류를 위한 Softmax Layer가 존재한다.
- FCN, U-Net과의 차이점
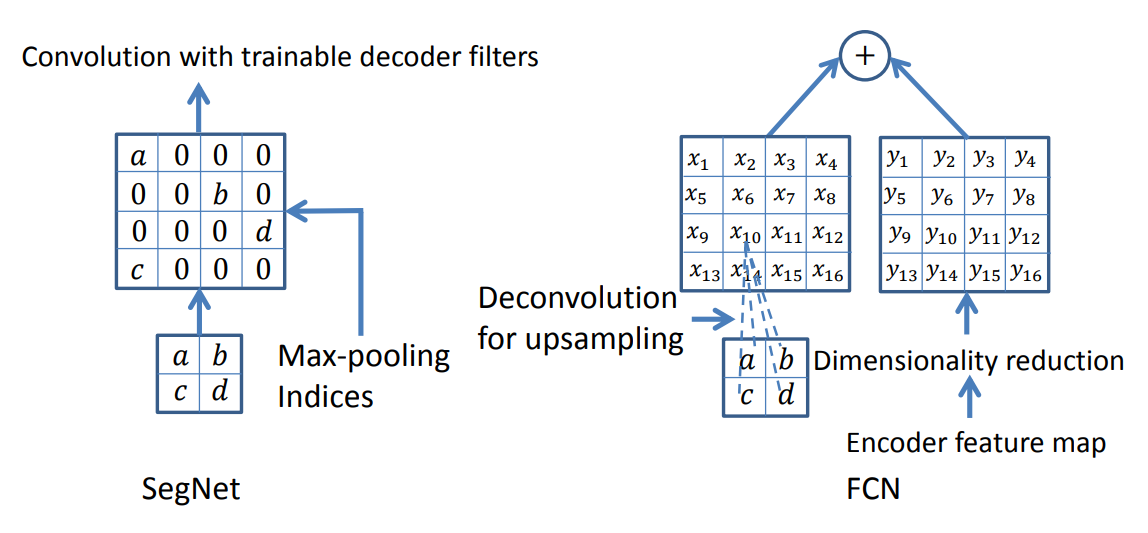
- Max Pooling indices라는 정보를 활용한다는 점에서 차이점 발생!
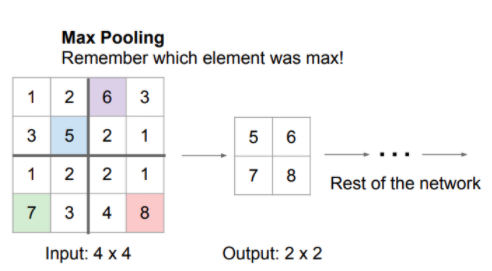
- Segnet은 Encoding 단계에서 pooling 시 'Max-Pooling indices' 정보를 기억한다.(Max-Pooling indices : pooling하기 전 data의 위치 정보)
Decoding 단계에서는 Encoding 과정에서 저장한 Max-Pooling indices를 이용하여 feature map을 upsampling한다.
➡ FCN은 upsampling할 때 Deconvolution을 학습해야 하기 때문에 그만큼 학습을 위한 가중치 파라미터가 필요하지만, SegNet에서는 이 과정이 생략되기 때문에 학습 파라미터가 줄게 된다.
➡ U-Net은 Decoding 과정에서 Skip combining하지만 U-Net은 Encoder의 같은 층 feature map 전체 정보를 Decoder로 전달하여 concat한다. 때문에 Max pooling indices의 일부 특징만 골라 사용하는 SegNet보다 무겁다.
- Max Pooling indices라는 정보를 활용한다는 점에서 차이점 발생!
4. DeepLab
-
지금까지 version 1(2015), 2(2017), 3(2017), 3+(2018)가 출판된 semantic segmentation 방법으로, Atrous convolution을 적극적으로 활용할 것을 제안한다.
- DeepLab V1 : atrous convolution 적용
- DeepLab v2 : multi-scale context 적용하기 위한 Atrous Spatial Pyramid Pooling(ASPP) 기법 제안
- DeepLab v3 : 기존 ResNet 구조에 atrous convolution을 활용해 좀더 dense한 feature map을 얻는 방법 제안
- DeepLab v3+ : separable convolution과 atrous convolution을 결합한 atrous separable convolution의 활용 제안
-
Atrous convolution
- 기존 convolution과 달리 필터 내부에 빈 공간을 둔 채로 작동
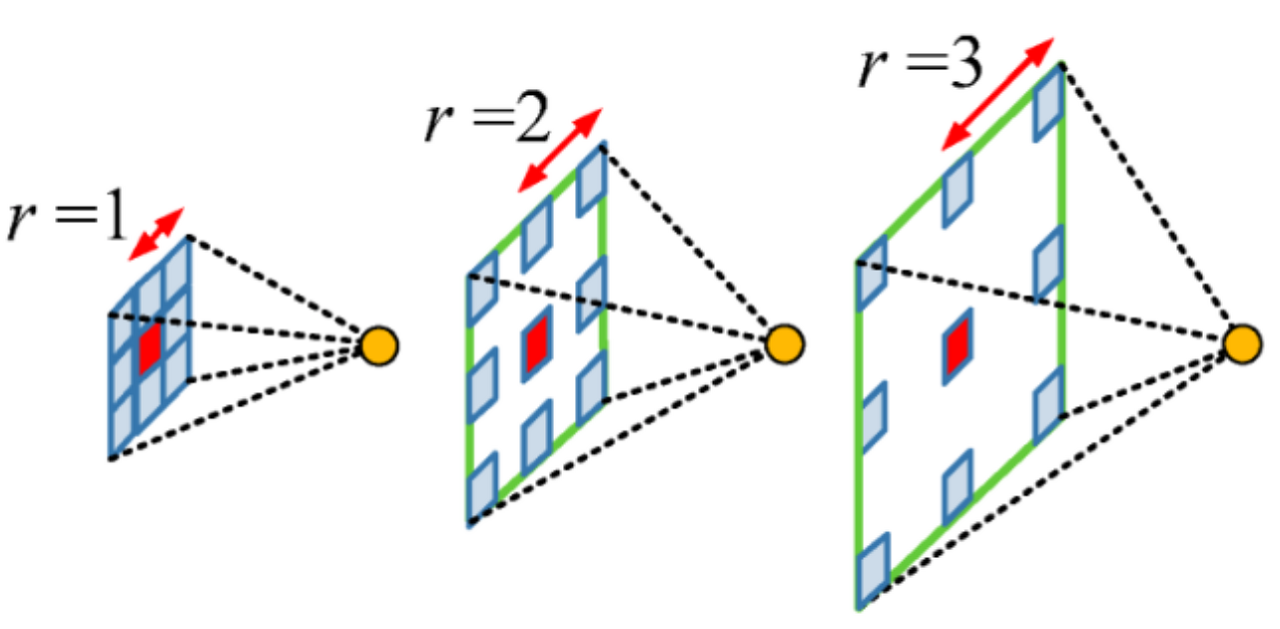
- 얼마나 빈 공간을 둘지 결정하는 파라미터인 rate가 1일 때는 기존 convolution과 동일하고, rate가 커질수록 빈 공간이 넓어진다.
- 기존 convolution과 동일한 양의 파라미터와 계산량을 유지하면서 한 픽셀이 볼 수 있는 영역(field of view)를 크게 할 수 있게 된다.
- 보통 semantic segmentation에서 높은 성능을 내기 위해서는, convolution neural network의 마지막에 존재하는 한 픽셀이 입력값에서 어느 크기의 영역을 커버할 수 있는지를 결정하는 receptive field의 크기가 중요하게 작용
- Atrous convolution을 활용하면 파라미터 수를 늘리지 않으면서 receptive field를 크게 키울 수 있으므로 활용하면 좋음.
- 기존 convolution과 달리 필터 내부에 빈 공간을 둔 채로 작동
-
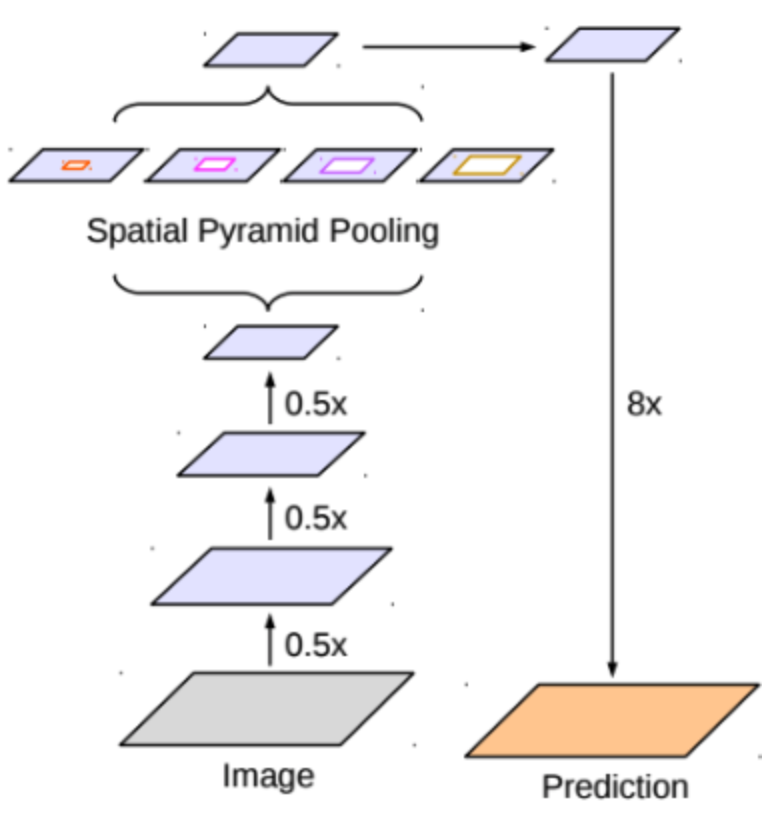
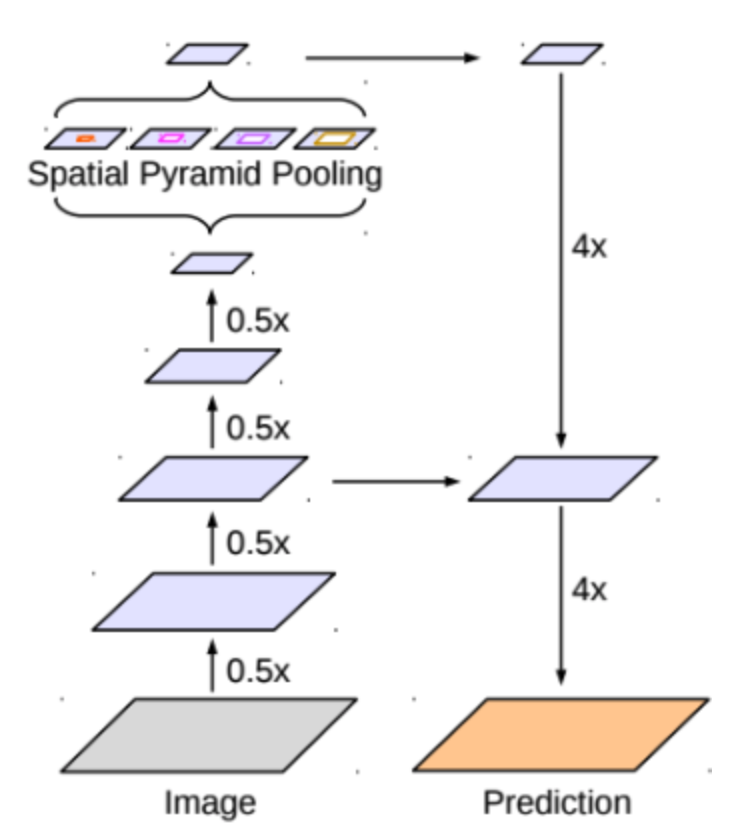
Spatial Pyramid Pooling
- Semantic segmentation의 성능을 높이기 위한 방법 중 하나로, spatial pyramid pooling 기법이 자주 활용됨
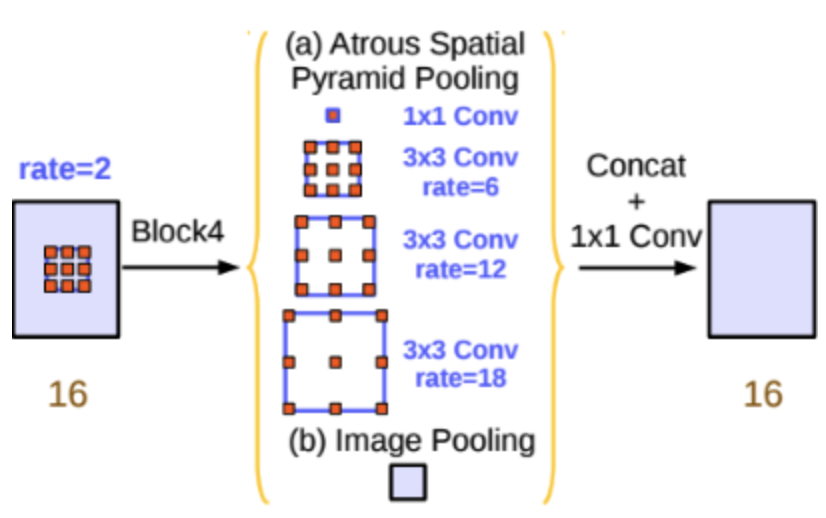
- DeepLab v2에서는 feature map으로부터, rate가 다른 여러 개의 atrous convolution을 병렬로 적용한 뒤, 이를 다시 합쳐주는 atrous spatial pyramid pooling(ASPP) 기법을 활용
- PSPNet에서도 atrous convolution을 활용하진 않지만 이와 유사한 pyramid pooling 기법을 적극 활용하고 있음
- multi-scale context를 모델 구조로 구현하여 보다 정확한 semantic segmentation을 수행할 수 있도록 도움
- Semantic segmentation의 성능을 높이기 위한 방법 중 하나로, spatial pyramid pooling 기법이 자주 활용됨
-
DeepLab v3+에서는 U-Net과 유사하게 intermediate connection을 갖는 encoder-decoder 구조를 적용하여 보다 정교한 object boundary를 예측할 수 있게 됨
-
Depthwise Separable Convolution
- 입력 이미지가 8x8x3(HxWxC)이고, convolution filter 크기가 3x3(FxF)이라고 했을 때, filter 한 개가 가지는 파라미터 수는 3x3x3(FxFxC) = 27이 된다.
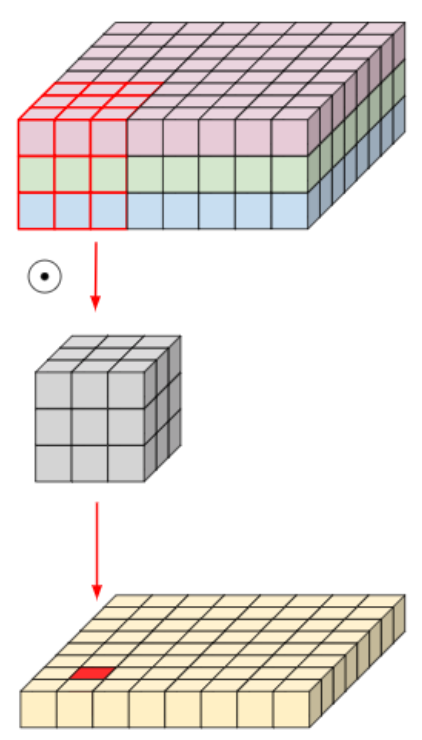
- 만약 filter가 4개 존재한다면, 해당 convolution의 총 파라미터 수는 3x3x3x4(FxFxCxN) = 108이 된다.
- 위 그림처럼 Convolution 연산에서 Channel 축을 filter가 한번에 연산하는 대신 아래 그림처럼 입력 영상의 Channel 축을 모두 분리시킨 뒤 filter의 channel 축 길이를 항상 1로 가지는 여러 개의 convolution filter로 대체시킨 연산을 depthwise convolution이라고 한다.
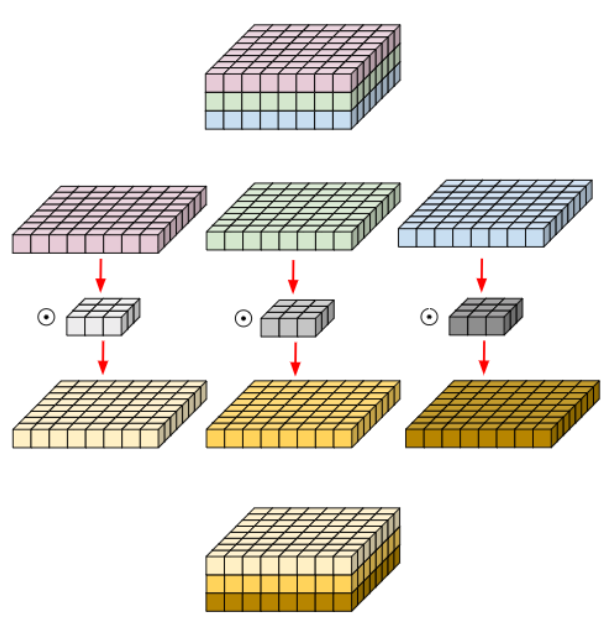
- 위의 depthwise convolution으로 나온 결과에 대해 1x1xC 크기의 convolution filter를 적용한 것을 depthwise separable convolution이라 한다.
➡ 연산이 복잡하나, 기존의 convolution과 유사한 성능을 보이면서도 사용되는 파라미터 수와 연산량을 획기적으로 줄일 수 있음
ex. 입력값이 8x8x3이고 16개의 3x3 convolution filter를 적용할 때 사용되는 파라미터의 개수는 Convolution : 3x3x3x16 = 432 / Depthwise separable convolution : 3x3x3+3x17 = 75 이다.
➡ 기존 convolution filter가 spatial dimension과 channel dimension을 동시에 처리하던 것을 따로 분리시켜 각각 처리함. 여러 개의 필터가 spatial dimension 처리에 필요한 파라미터를 하나로 공유함으로써 파라미터의 수를 줄일 수 있게 되는 것!
➡ 두 축을 분리시켜 연산을 수행하더라도 최종 결과값은 결국 두 가지 축 모두를 처리한 결과값을 얻을 수 있으므로, 기존 convolution filter가 수행하던 역할을 충분히 대체할 수 있음
➡ 픽셀 각각에 대해 대해 label을 예측해야 하는 semantic segmentation을 위해 CNN 구조가 깊어지고, receptive field를 넓히기 위해 더 많은 파라미터를 사용하게 되는 상황에서, separable convolution을 활용하여 파라미터 수를 대폭 줄이면, 보다 깊은 구조로 확장해 성능 향상 및 메모리 사용량 감소/속도 향상 기대 가능
- 입력 이미지가 8x8x3(HxWxC)이고, convolution filter 크기가 3x3(FxF)이라고 했을 때, filter 한 개가 가지는 파라미터 수는 3x3x3(FxFxC) = 27이 된다.
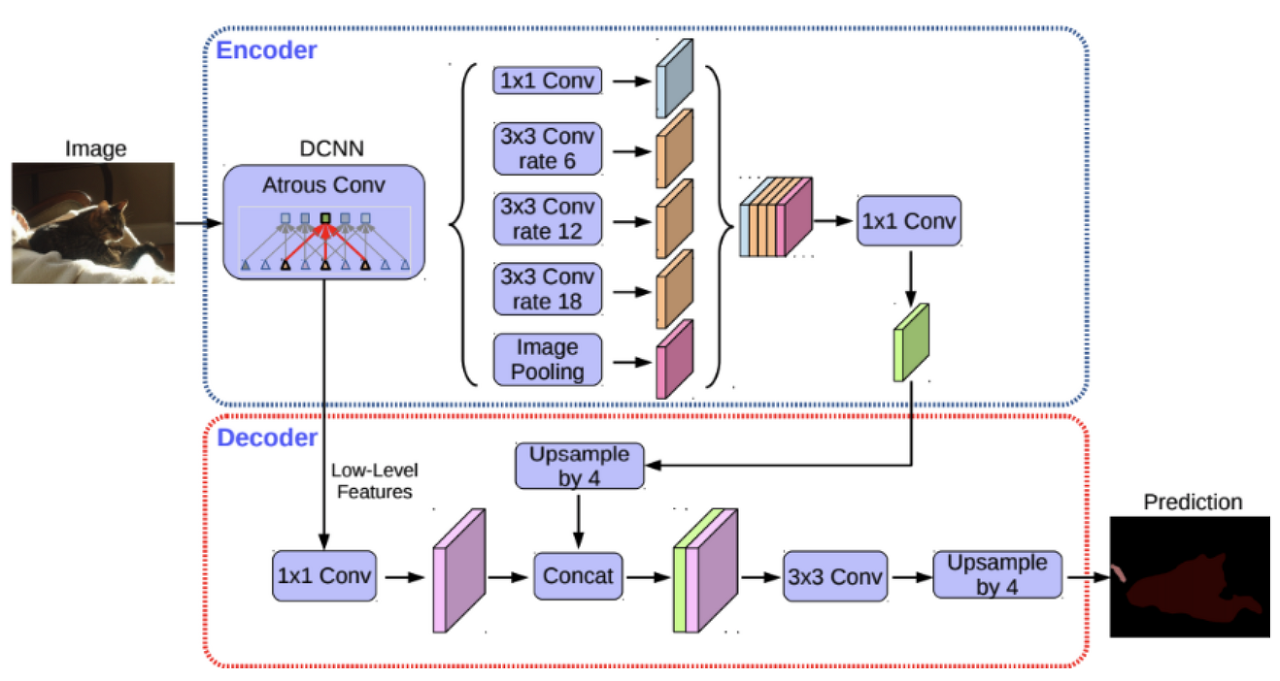
| DeepLab V3 | DeepLab V3+ |
|---|---|
 |  |
| Encoder : ResNet with atrous convolution ASPP Decoder : Bilinear upsampling | Encoder : Xception(Inception with separable convolution) ASSPP(Atrous Separable Spatial Pyramid Pooling) Decoder : Simplified U-Net style decoder |
- DeepLab V3+는 ResNet을 사용하는 encoder가 separable convolution을 적극 활용한 구조인 Xception으로 대체된다.
- Multi-scale context를 얻기 위해 활용되던 ASPP에는, separable convolution과 atrous convolution을 결합한 atrous separable convolution이 적용된 것으로 대체
- 기존에 단순하게 bilinear upsampling으로 해결했던 decoder 부분이 U-Net과 유사한 형태의 decoder로 대체
- Encoder와 ASPP, decoder 모두 separable convolution을 적극 활용함으로써 파라미터 사용량 대비 성능 효율을 극대화
5. ResNet
-
마이크로소프트에서 개발한 알고리즘으로 'Deep Residual Learning for Image Recognition'을 의미한다.
-
CNN 모델에서 층을 깊게 할 수록 Model Capacity가 크기 때문에 오버피팅이 발생하더라도 더 좋은 성능이 당연할 것이라 생각했으나 달라지지 않음.
➡ Optimization의 문제. 네트워크가 더 깊어질수록 Optimize(Train)하는 것이 더 어렵기 때문에 Deep 네트워크가 Shallow 네트워크만의 퍼포먼스를 보이지 않은 것 -
ResNet 모델의 Architecture
- VCG-19의 구조를 뼈대로 하여 convolution layer를 추가해 깊게 만든 후, shortcut들을 추가
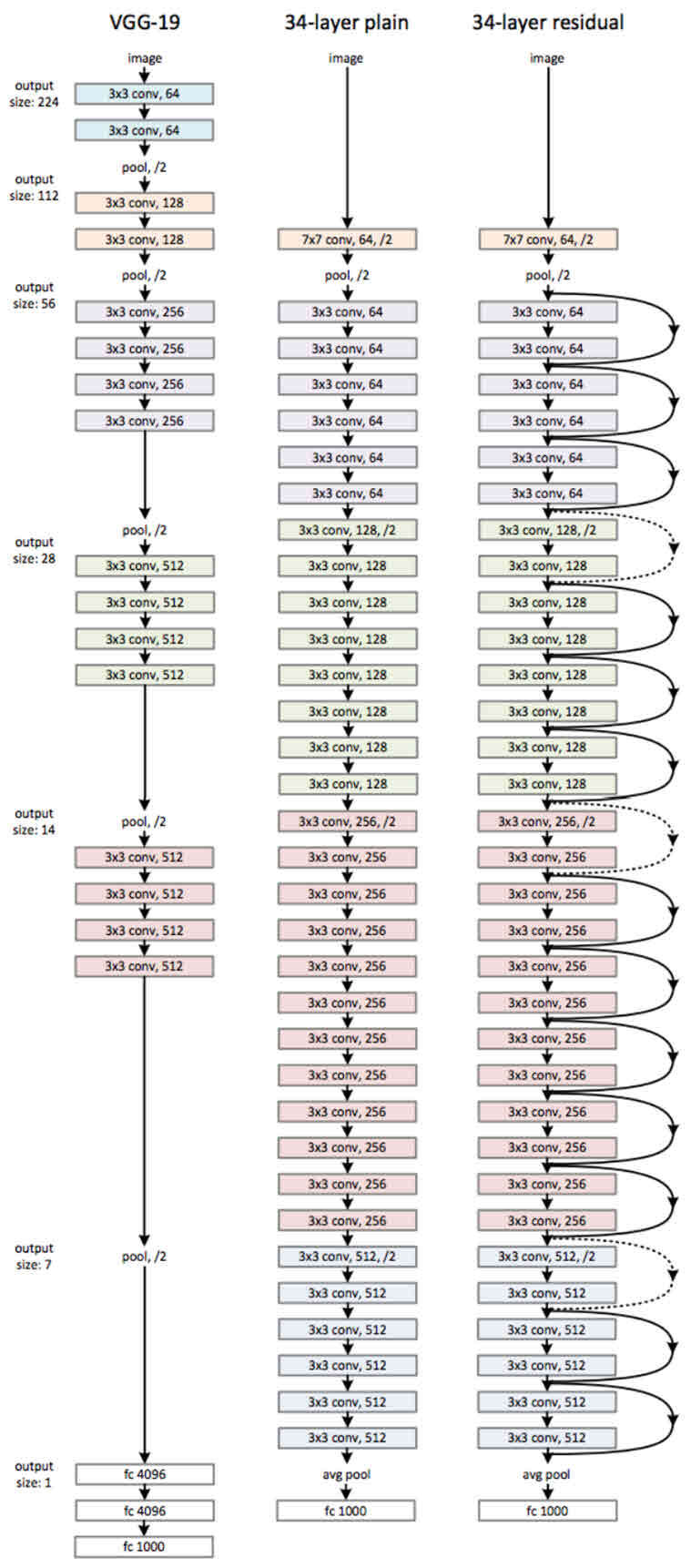
- plain 네트워크는 망이 깊어지면서 오히려 에러가 커졌으나, ResNet의 경우 망이 깊어지면서 에러가 작아졌다.
➡ shortcut을 연결해 잔차(residual)를 최소화되도록 학습한 효과
➡ 152층의 ResNet이 가장 뛰어난 성능을 가짐.
- VCG-19의 구조를 뼈대로 하여 convolution layer를 추가해 깊게 만든 후, shortcut들을 추가
-
Residual Block
- 입력값을 출력값에 더해줄 수 있도록 지름길을 하나 만들어준 것(잔차 연결)
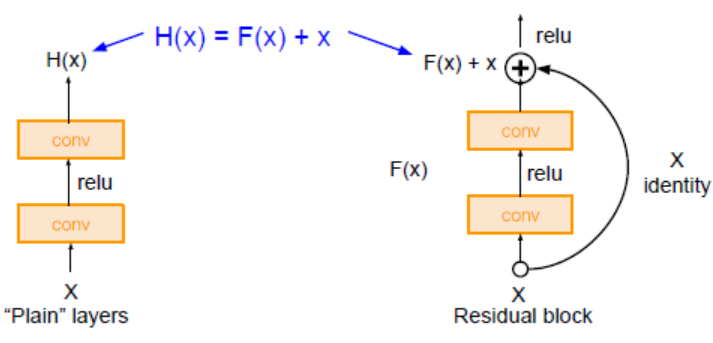
- 동일한 연산을 하고 나서 input x를 더하는 것(Residual block, 기존에 학습한 정보를 보존, 추가적으로 학습하는 정보)과 더하지 않는 것(Plain layer, 기존에 학습한 정보를 보존하지 않고 변형시켜 새롭게 생성하는 정보)이 그 차이점
- Residual Connection(skip connection)을 통해 각각의 Layer(block)들이 작은 정보들을 추가적으로 학습하도록 함(=각각의 레이어가 배워야 할 정보량 축소)
- 기존의 신경망은 입력값 x를 타겟값 y로 매핑하는 함수 H(x)를 얻는 것이 목적이었으나, ResNet은 F(x)+x를 최소화하는 것을 목적으로 함.
➡ F(x)가 0이 되면 출력과 입력이 모두 x로 같아지게 된다. F(x) = H(x)-x이므로 F(x)를 최소로 해준다는 것은 H(x)-x를 최소로 해주는 것과 동일한 의미를 지님. H(x)-x를 잔차라고 한다.
➡ 잔차를 최소화 해주는 모델. ResNet
- 입력값을 출력값에 더해줄 수 있도록 지름길을 하나 만들어준 것(잔차 연결)
-
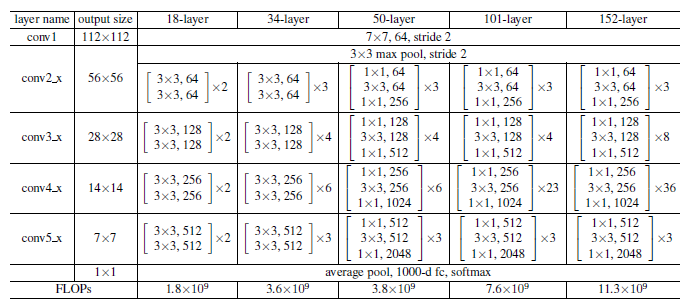
Residual Connection with Bottle Neck Layer
- Deep Network에서의 연산량을 줄이기 위해 GoogLeNet에서 사용했던 Bottle Neck Layer를 사용한 Residual Block를 사용함.
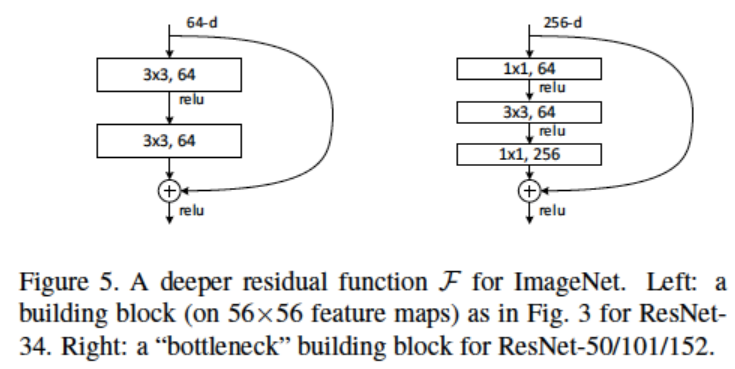
- ResNet50 이상부터 BottleNeck을 사용한 Block을 사용함.
- Input x의 dimension을 64로 축소한 후 f(x)를 연산하고 나중에 다시 256으로 복원시켜주는 것을 확인할 수 있다.
- Deep Network에서의 연산량을 줄이기 위해 GoogLeNet에서 사용했던 Bottle Neck Layer를 사용한 Residual Block를 사용함.
참고자료
Image Segmentation 이란? - 정의, 종류, 응용분야, 딥러닝, 트렌드
Image Segmentation 정리 (computer vision)
1. Image Segmentation 기본이론[6]~[8] - 라온피플 머신러닝 아카데미
[DL] Semantic Segmentation (FCN, U-Net, DeepLab V3+)
[Segmentation] SegNet
[CNN 알고리즘들] ResNet의 구조
(7)ResNet(Residual Connection)
