recursive
사람은 자신이 어디에 있는지 알 수 있다.
신체에 있는 신경은 매우 복잡하고 무척 많다. 그리고 그 신경들의 작용으로 반응한다.
하지만 로봇은 자신의 위치를 정확하게 알 수 있을까?
Global map에서 위치를 아는 방법은 여러 개가 있을 수 있다.
하지만 결국 센서로 데이터를 수집하여 신뢰도를 바탕으로 어디에 있겠다라고 확률을 계산해내는 것이다.
Bayesian Filter는 센서들의 데이터와 로봇을 제어한 제어값을 바탕으로 재귀적으로 위치를 추정하는 것이다.
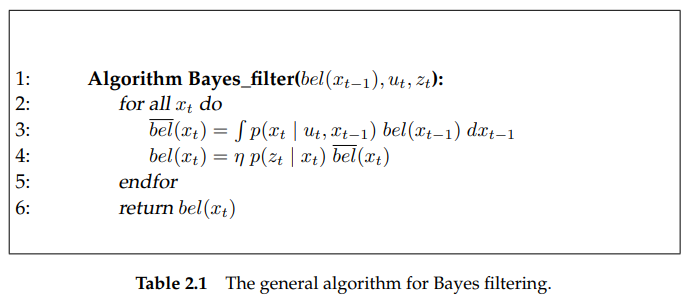
다음은 Bayesian Filter의 알고리즘이다.
재귀적으로(recursive)라는 말처럼 for문으로
line 3: 현재 t일 때 위치 추정값(belief, 이하 bel)을 x가 t-1일 때의 위치추정값(bel)과 제어값을 계산하여 예측한다(prediction, control update).
line 4: 그리고 노이즈를 고려한 센서 측정값으로 예측값을 보완하고 정규화한다(measurement update, correction). 이것이 Bayesian filter의 핵심내용이다.
3번째 줄에서 적분이 나온 것은

이 식이 theorem of total probability에 의해 다시 쓰여졌기 때문이다.
출처: Probabilistic Robotics , https://gaussian37.github.io/autodrive-ose-bayes_filter/#%EC%9E%90%EB%8F%99%EC%B0%A8-%EC%9D%B4%EB%8F%99-%EC%98%88%EC%A0%9C%EB%A5%BC-%EC%9D%B4%EC%9A%A9%ED%95%9C-bayes-filter-%EC%88%98%EC%8B%9D%EC%9D%98-%EC%9D%B4%ED%95%B4-1
