intel에서 만든 RealSense depth camera로 vslam을 해보고자 ros로 사용하고 설치하겠다.
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
위 공식문서를 잘 따라가면 된다.
$ sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
먼저 해본다. 하지만 public key를 받아오지 못한다면
--keyserver hkp://keyserver.ubuntu.com:80
요거를
--keyserver-options http-proxy=http://localhost:3128
요거로 바꾸어서 실행한다.
$ sudo apt-key adv --keyserver keyserver.ubuntu.com --keyserver-options http-proxy=http://localhost:3128 --recv-keys BBEBDCB318AD50EC6865090613B00F1FD2C19886
그리고
$ sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u $ sudo apt-get install librealsense2-dkms $ sudo apt-get install librealsense2-utils
ros wrapper 다운 받고 roslaunch!
realsense_camera 노드 이용법
$ sudo apt-get install ros-$ROS_DISTRO-realsense2-camera $ cd catkin_ws/src $ git clone https://github.com/IntelRealSense/realsense-ros.git $ cd realsense-ros/ $ git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1` $ rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 map world 5$ roslaunch realsense2_camera demo_pointcloud.launch$ roslaunch realsense2_camera rs_camera.launch 혹은 $roslaunch realsense2_camera rs_camera.launch camera:=cam_1 serial_no:=<serial number of the first camera>
rviz열고 Global Options의 Fixed Frame을 Camera link로 바꾼다.
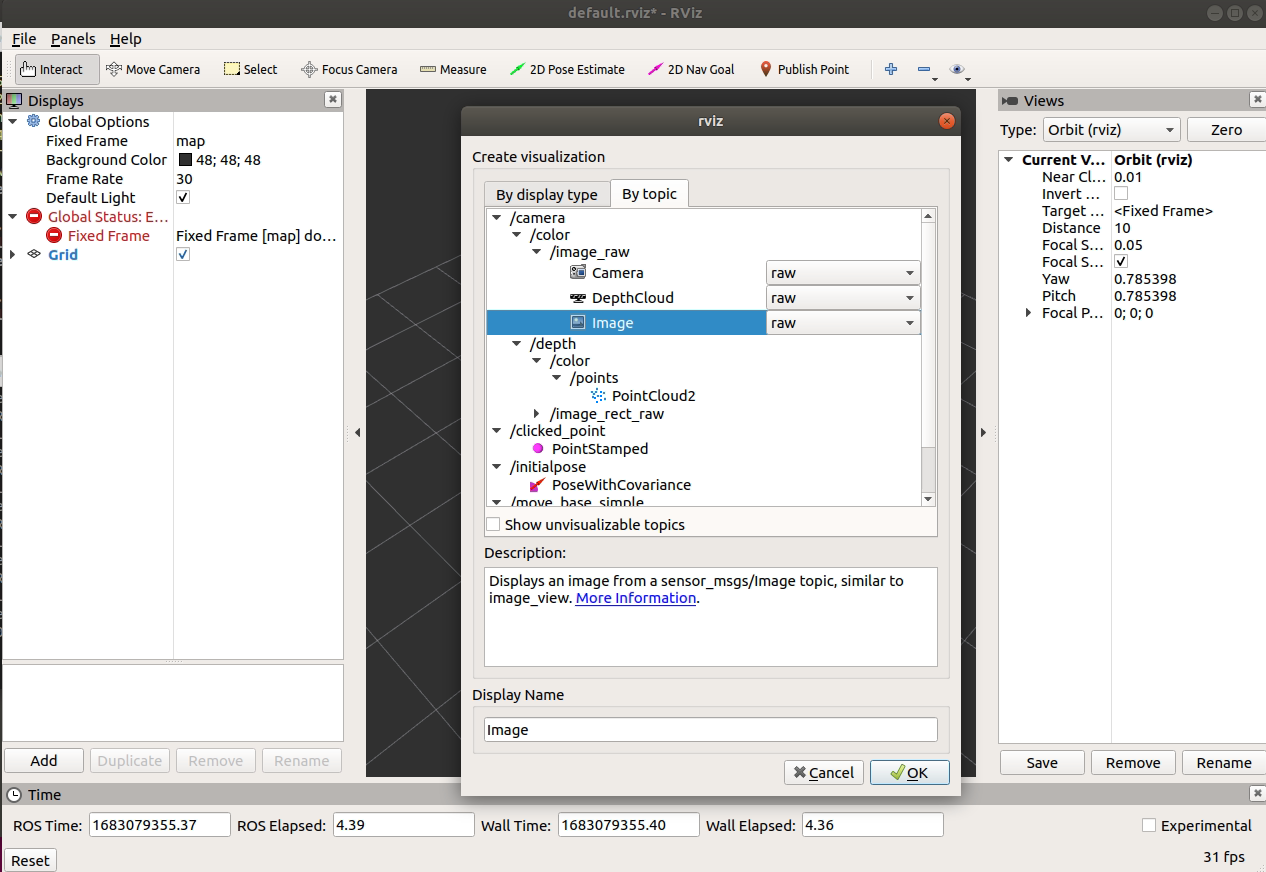
add 버튼 눌러서 by topic으로 들어가야 image raw, pointcloud2를 보일 수 있음
다른 launch file도 가능
