intel Realsense Depth Camera D455 설치
https://github.com/introlab/rtabmap_ros
이거대로 설치한다.
혹시 catkin_make 후
ERROR: cannot launch node of type [rtabmap_odom/rgbd_odometry] : Cannot locate node of type이런 에러가 뜬다면 빌드가 안 된 것.
catkin_make --only-pkg-with-deps rtabmap_ros 해보기
혹은$ source /opt/ros/<ros-distro>/setup.bash $ source ~/catkin_ws/devel/setup.bash
Mapping and Localization
1. RTABmap
- Parameter Tuning
카메라에 맞게 파라미터를 튜닝해주어야 한다.
참고 https://github.com/introlab/rtabmap/wiki/Change-parameters
기본 config 파일부터 실행한 후 파라미터를 수정하고 다시 확인하는 과정을 거쳐 해당 카메라에 맞게 최적화한다.
- Slam
$ roslaunch realsense2_camera demo_pointcloud.launch
or $roslaunch realsense2_camera opensource_tracking.launch
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rtabmapviz:=false rviz:=trueEdit -> Update Cache from a local database copy... -> ~/.ros/rtabmap.db 선택
맵핑 끝난 후
Edit -> Localization 클릭, Window -> Show view -> Graph View 하여 localization 확인 가능
Ctrl-C하면 Map 저장 rgbd.launch이나 stereo_mapping.launch도 가능
- Localization하려면 localization을 true로
$ roslaunch rtabmap_ros rtabmap.launch depth_topic:=/camera/depth/image_rect_raw/ rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info rtabmapviz:=true localization:=true2. Rviz
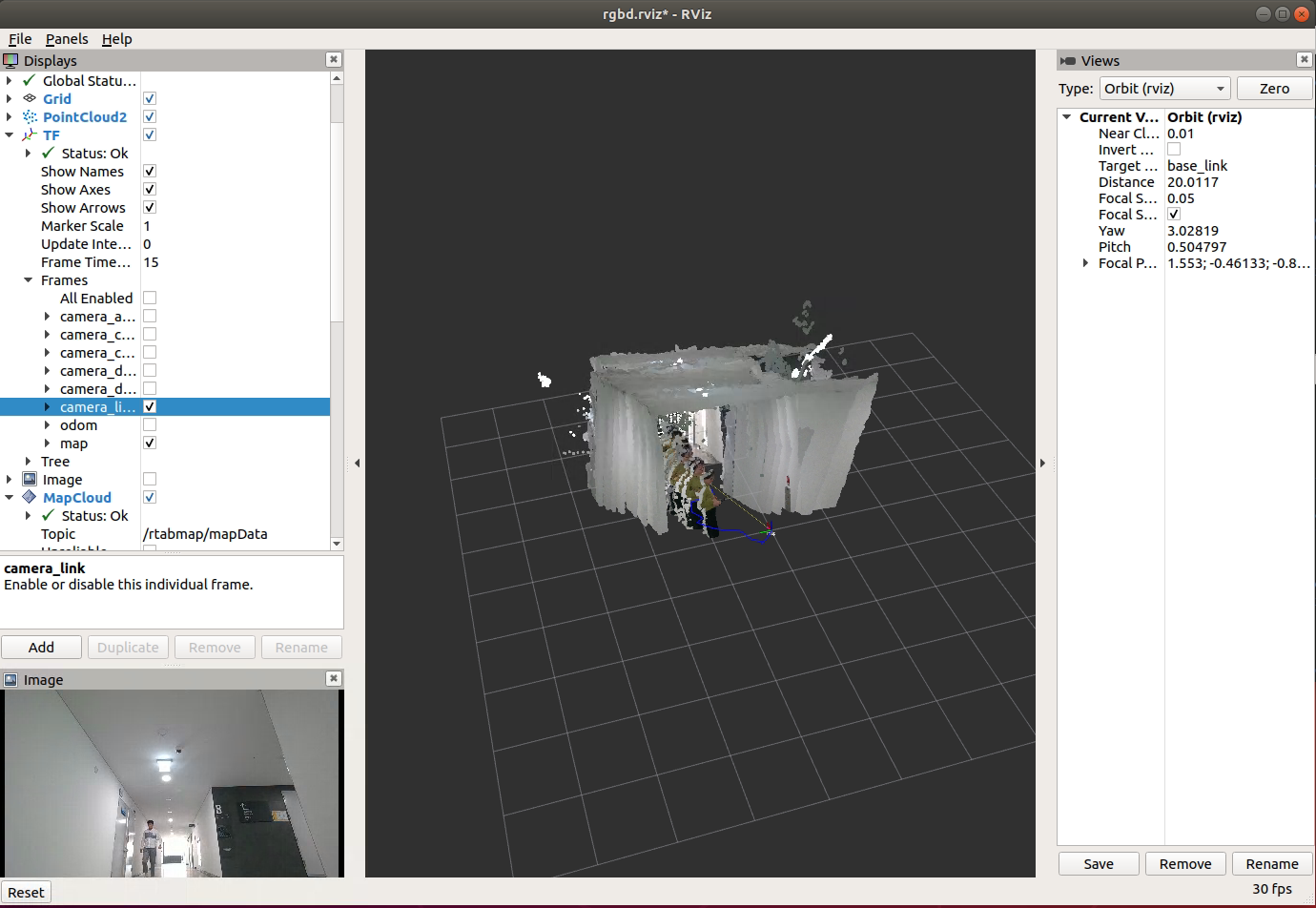
$roslaunch realsense2_camera opensource_tracking.launch약간 기다린 후
PointCloud2 체크
TF 에서 Frame을 camera_link와 map 체크
image 보이고 싶으면 image topic을 /camera/color/image_raw
rosbag 저장
먼저 rosbag 실행한 후 위 명령어 slam하기.
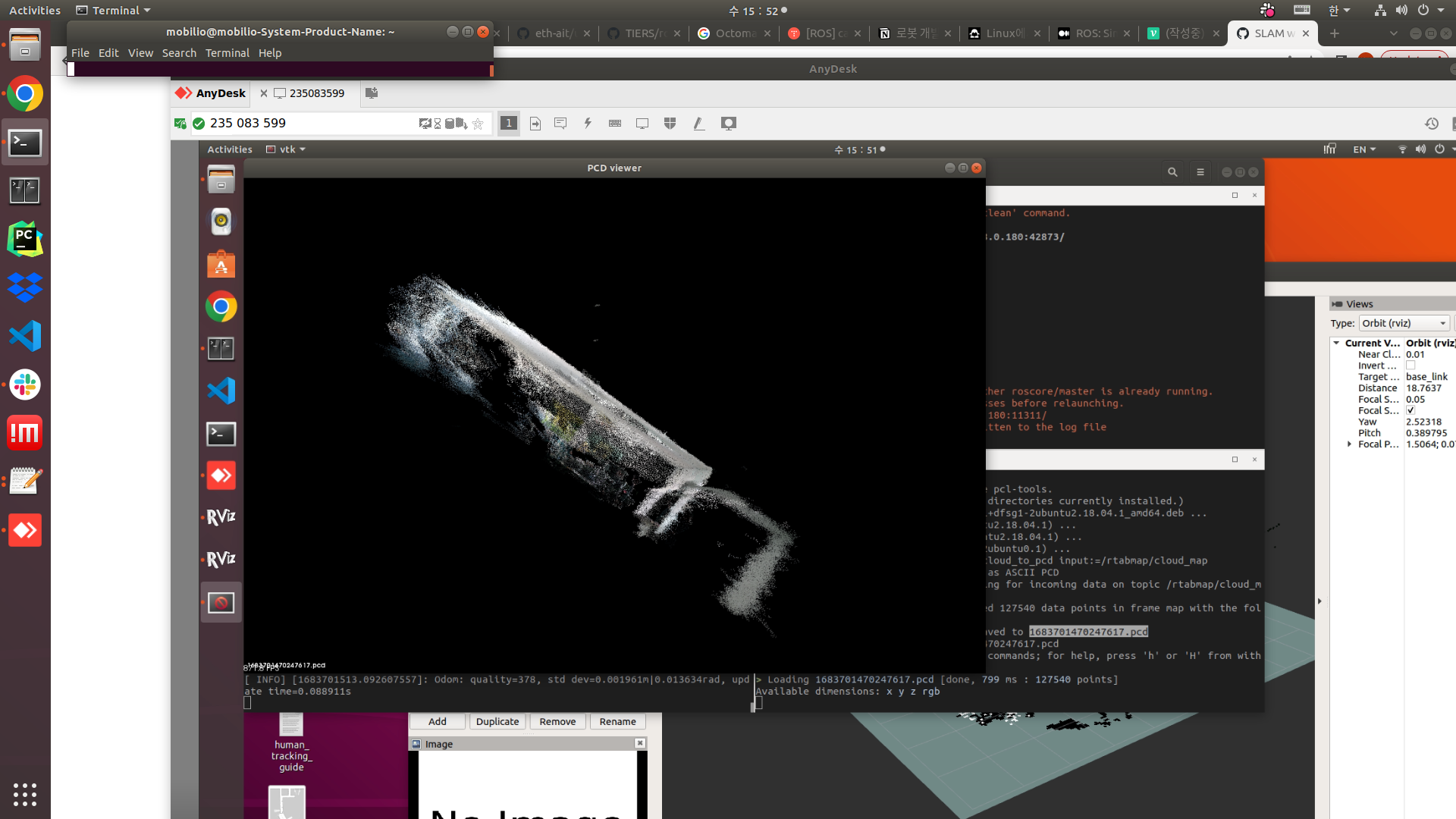
rosbag record -O my_bagfile_1.bag /camera/aligned_depth_to_color/camera_info camera/aligned_depth_to_color/image_raw /camera/color/camera_info /camera/color/image_raw /camera/imu /camera/imu_info /tf_staticPCL viewer
sudo apt-get install pcl-tools로 pcl tools 설치한 후
rosrun pcl_ros pointcloud_to_pcd input:=/rtabmap/cloud_map 다른 터미널에서 실행하면 터미널 창에 긴 숫자.pcd로 저장되는 것을 알려준다.
pcl_viewer 1543906154413083.pcd로 pcl cloud 결과물 보면 된다.
참고
https://github.com/IntelRealSense/realsense-ros/wiki/SLAM-with-D435i
https://admantium.medium.com/ros-simultaneous-mapping-and-localization-with-rtabmap-e527e6a6716
