Localization-Realsense
1.intel Realsense Depth Camera D455와 Rtabmap 사용하여 vslam
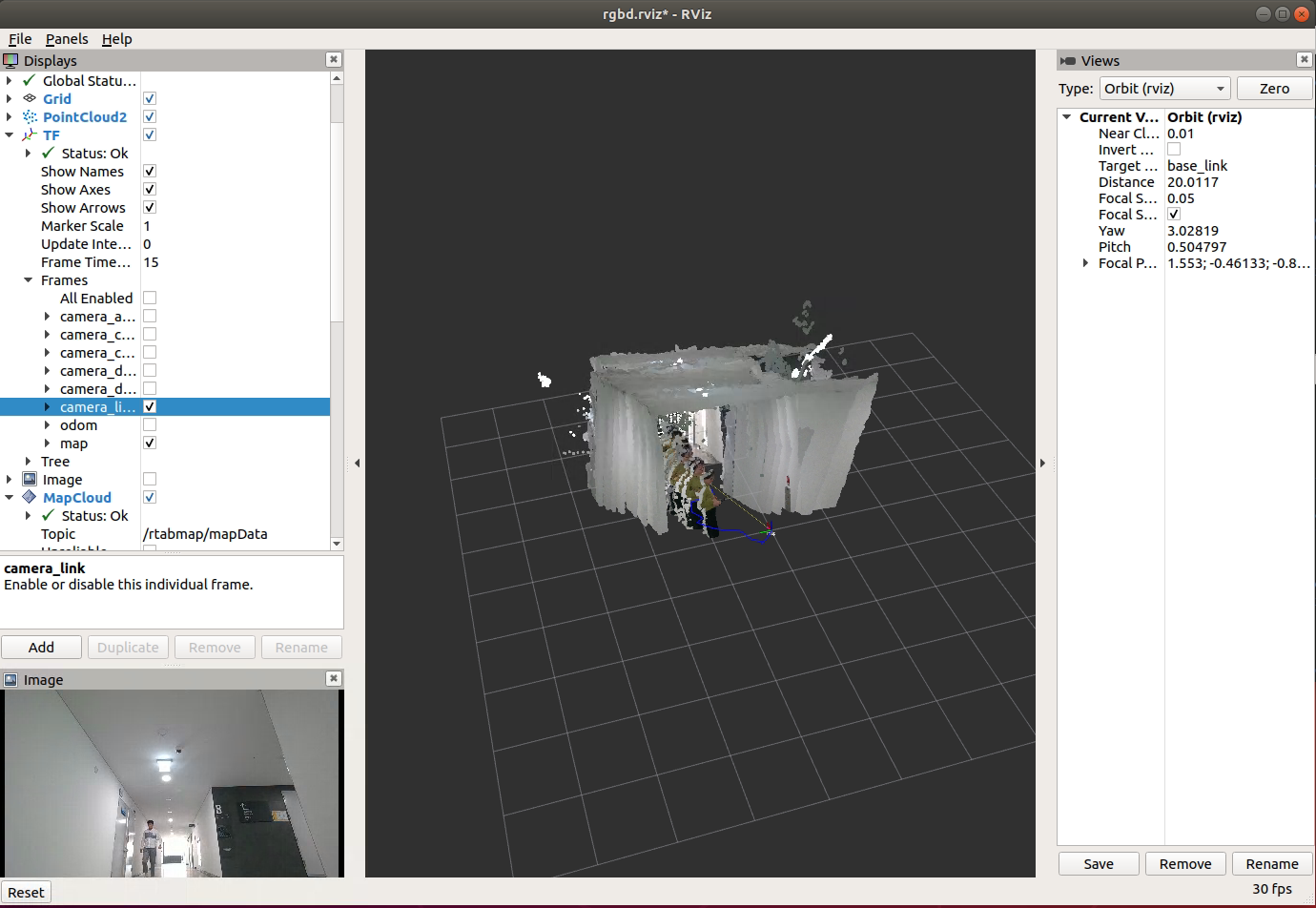
https://github.com/introlab/rtabmap_ros이거대로 설치한다.catkin_make 후 이런 에러가 뜬다면 빌드가 안 된 것.catkin_make --only-pkg-with-deps rtabmap_ros 해보기혹은 약간 기다린 후참고
2023년 5월 3일
2.intel RealSense ROS 설치
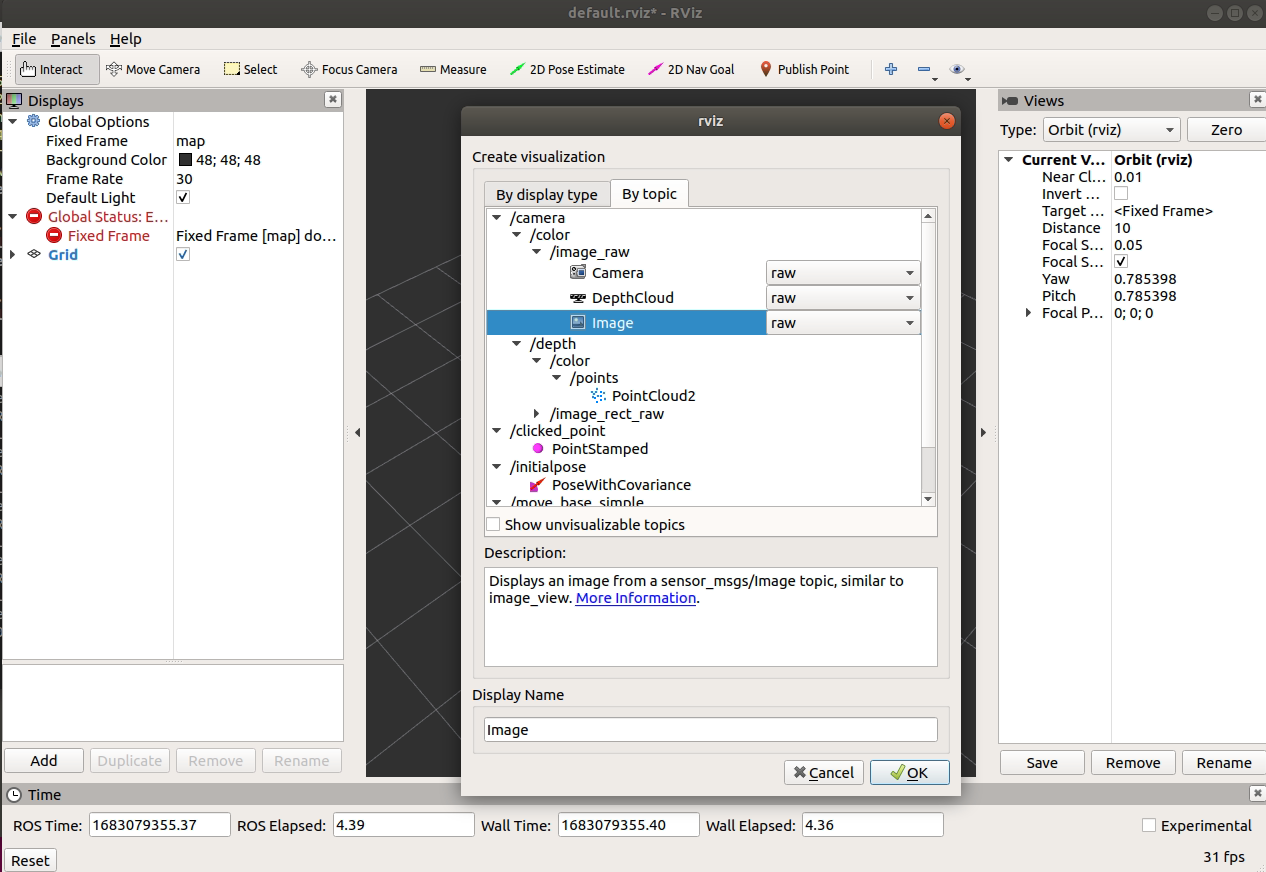
intel에서 만든 RealSense depth camera로 vslam을 해보고자 ros로 사용하고 설치하겠다.https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.
2023년 4월 26일