연구 주제
가상환경(Carla)에서 자율주행 차량 데이터를 취득하는 테스트 시나리오를 제안함
연구가 필요한 이유
실제 도로 상황은 다양한 변수에 의해 예측하기 어려운 상황이 수시로 발생하며, 테스트를 위한 기반 시설을 구축하는 것은 상당한 비용과 위험 상황을 구현하는데 현실적인 제약이 존재함
시뮬레이션을 이용하여 여러 가지 도로 주행 상황의 데이터를 수집하기 위해 연구를 진행
결론
3GPP(3rd Generation Partnership Project)에서 정의한 시나리오를 기반으로 5계층의 표현 포맷에 따라 시나리오 데이터 취득 환경을 Carla에서 구현하였음
같은 상황에서 여러 시나리오가 적용될 수 있도록 함
실제 도로 환경의 끊임없는 다양한 변수와 위험 상황을 재현하기 위하여 다양한 운전 패턴을 가진 차량을 만들어 제공함
논문 내용
서론
많은 연구가 3GPP에서 제공한 통신 표준을 사용하여 연구를 진행하고 있으며, V2X를 위한 통신 표준과 평가를 위한 시나리오도 제공하고 있음
실제 도로 상황은 다양한 변수에 의해 예측하기 어려운 상황이 수시로 발생하며, 테스트를 위한 기반 시설을 구축하는 것은 상당한 비용과 위험 상황을 구현하는데 현실적인 제약이 존재함
본 논문에서는 독일의 Pegasus 프로젝트의 포맷에 따라 시나리오를 정의하였음
3GPP 시나리오
3GPP는 V2X 시나리오에서의 통신 성능 평가와 서비스 요구사항을 충족하기 위해 크게 군집 주행, 첨단 주행, 센서 확장, 원격 주행 4가지의 시나리오를 정의하고 있음
군집 주행
군집 내에 존재하는 차량은 선두 차량으로부터 주기적인 데이터를 수신함
군집 내에 존재하는 차들은 선두 차량의 제어 명령만 받는 것이 아니라 상호 간 데이터를 공유할 수도 있음
단독 주행 시나리오
첨단 주행, 센서 확장, 원격 주행 세 가지 시나리오는 같은 교통 상황에서 다르게 적용될 수 있음
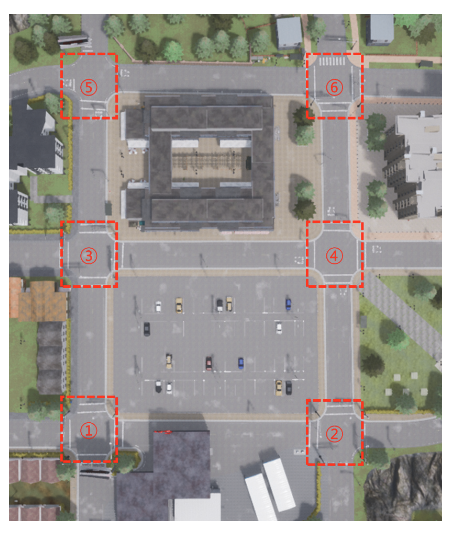
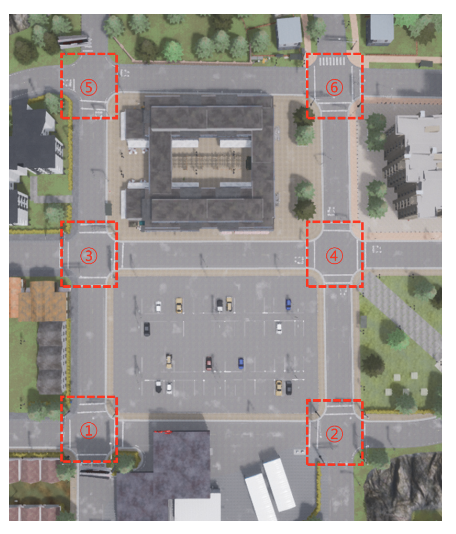
십자 교차로를 예로 들면
1. 첨단 주행은 교차로에서 꼬리물기 현상과 도로 혼잡도를 감소시키기 위해 주변 차량 데이터를 RSU로 수집하고, 차량의 미래 상태를 예측하여 차량 흐름을 개선할 수 있음
2. 센서 확장은 사각지대에서 발생할 수 있는 접촉 사고를 피하기 위하여 교차로에 설치된 LiDAR와 Camera를 사용하여 AR 화면을 제공하여 운전자에게 알려줄 수 있음
3. 원격 주행은 차량과 원격 주행 주체와의 타임 지연 최소화가 중요하기 때문에, 교차로에서 차량이 밀집하는 경우 리소스를 분배하는 로드 밸런싱 기술이 필요함
3GPP 시나리오 기반 데이터 취득 환경 제작
주행 중에 발생할 수 있는 다양한 상황에 대한 데이터를 얻기 위해서 Ego Vehicle을 제외한 일부 차량에 신호를 무시하거나, 다른 차량과 안전 거리를 유지하지 않고 충돌하는 행동이 발생할 확률과 제한속도를 초과할 수 있도록 설정함
군집 주행 시나리오
아래와 같은 시나리오 계층을 두어 테스트 하였음
3GPP에서 정의한 시나리오를 기반으로 5계층의 표현 포맷을 적용함
계층 1은 주행 도로에 관한 속성
계층 2는 신호등과 같은 기반 시설과 관련된 계층
계층 3은 계층 1과 계층 2에서 발생할 수 있는 변수나 일시적인 변화로 시나리오에서는 제외함
계층 4는 시나리오에 영향을 미치는 객체들로 군집이 형성된 상태로 주행하는 차량을 5대로 설정하여 최소 3m의 안전거리를 유지하도록 함
계층 5는 사용자의 선택에 따라 날씨를 설정할 수 있도록 함
단독 주행 시나리오
대부분 군집 주행 시나리오와 비슷하나 계층 4에서 도로 혼잡도를 표시할 수 있는 NV(Neighboring Vehicle)의 수와, 도로에서 위험도를 높일 수 있는 공격적인 주행 패턴의 차량 수를 사용자가 수정할 수 있도록 함
정리
- 시뮬레이션을 이용하여 여러 가지 도로 주행 상황의 데이터를 수집하기 위해 Carla 시뮬레이션을 사용
- 3GPP에서 정의한 시나리오를 기반으로 군집 주행, 첨단 주행, 센서 확장, 원격 주행 시나리오를 생성하고 실험을 진행함
- 구현에 있어 모든 변수는 고려할 수 없었고, 수집된 데이터는 이상적인 값이 측정되므로, 가상환경 데이터를 사용하여 기술을 평가할 때 위와 같은 한계를 고려하여야 함
논문 링크
https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE11724809
