연구 주제
자율주행 자동차의 안전 기능을 평가하고 검증하는데 사용할 수 있는 합리적인 고위험 시나리오를 생성하는 방법론 제안
연구가 필요한 이유
- 현재 양산되고 있는 LV.2 수준의 ADAS 기능의 경우 평가 방법, 절차 및 사용 장비까지 프로토콜의 형태로 정의하고 있으나, 자율주행 자동차가 주행되는 환경 영역까지 반영된 검증이 진행되기엔 어렵다.
- 현재 시뮬레이션 SW들은 사고를 유발할 수 있는 한계 상황와 고위험 주행에 가까운 환경을 구현하여 검증하기 힘듬
- 기존의 사고 재구성 기법을 개선할 수 있음
결론
- 사고 데이터 취득을 시작으로 사고 재구성 기법과, 위치 수렴 알고리즘을 유도함
- 핵심이 되는 미끄럼 거리 추정 등 다양한 추정 및 보정 알고리즘을 제작하였고, 차량 충돌 시뮬레이션 SW 해석과 비교하여 타당성을 검증함
- 논문에서 제안하는 실제 사고 데이터 재구성 과정을 통해 테스트 시나리오를 생성하고 이를 자율주행 자동차 Verification & Validation 과정에 활용할 경우 고위험 주행 조건에서 자율주행 자동차의 3대 핵심 프로세스(인지, 판단, 제어)에 대해 평가가 가능할 것으로 예상됨
논문 내용
서론
각국의 정부는 자율주행 자동차가 안전하게 주행할 수 있도록 운영 설계 영역인 ODD(Operational Design Domain)에서 선언한 가이드라인을 통해 지침을 제공하고 있음
현재는 자율주행 자동차 SW를 개발하는 담당자들의 일부가 시험과평가의 업무를 개발자 관점에서 병행하고 있음
하지만 시뮬레이션 SW들은 사고를 유발할 수 있는 한계 상황와 고위험 주행에 가까운 환경을 구현하여 검증하기 힘듬
따라서 본 논문에서는 차량 충돌 시뮬레이션(ex:PC-Crash, Virtual CRASH)을 사용하여 자율주행 자동차 검증에 적합한 고위험 시나리오를 개발하는 방법론에 대해 제안함
이 연구에서 정의한 고위험은 실제 차대차 사고가 발생한 데이터의 반영을 의미하며, 고위험 시나리오 개발 5단계를 통해 두 차량의 주행 경로와 속도를 합리적으로 추정할 수 있는 방법을 소개함
5 step - 고위험 시나리오 개발
이번 연구에서 정의하는 고위험은 오직 차대차 주행 조건에 한하여 발생한 실제 사고의 주행 조건만을 반영함
step 1 - 사고 현장 다이어그램(Diagram) 수집
고위험 시나리오를 개발하기 위해서는 사고 현장 다이어그램(Accident scene diagram)이 필수적으로 확보되어야 함
하지만, 실제 도로 환경에서 발생한 사고 데이터의 경우 많은 개인 정보를 포함하고 있어 쉽게 접근할 수 없음
따라서 NASS-CDS(National Automotive Sampling System Crashworthiness Data System)에서 제공되는 사고 데이터를 활용함
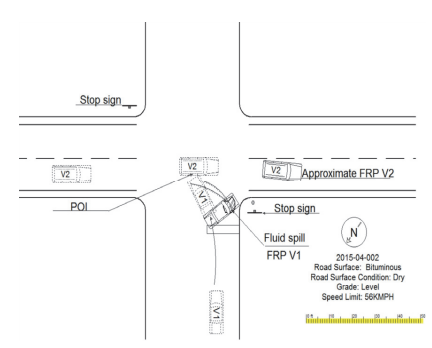
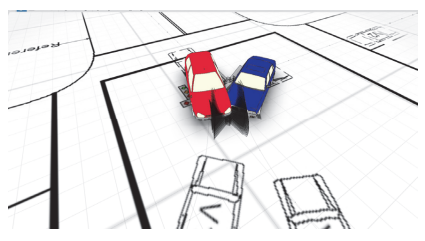
위 사진을 보면 교차로에서 두 대의 차량 충돌이 발생한 것으로 도로의 형태, 주행 경로, 충돌 위치점과 충돌 이후 최종 정차 위치 등에 대한 개략적인 수준의 정보를 제공함
하지만 충돌 이전 주행속도 정보를 제공하지 않으므로 주행 시나리오로 활용하는데 한계가 있음
step 2 - 사고 차량 미끄럼 거리 추정
두 차량의 충돌 위치점을 시작으로 사고 차량의 미끄럼 거리를 추정함
사전에 확보된 자차와 방해 차량의 제원 값(Vehicle specification) 데이터와 수식을 이용하여 구할 수 있음
step 3 - 방해 차량 주행 속도 추정
사고 현장 다이어그램에서 주행 경로와 속도에 관심이 높은 차량을 자차. 즉, 자율주행 자동차로 선정하게 되고 그 외의 다른 차량은 방해 차량으로 선정함
이후 방해 차량의 주행 속도를 결정함
먼저 제한 속도(speed limit)를 기준으로 주행한 이후, 속도를 변경하면서 과정을 반복함
도로 교통 시행 규칙에서 규정하고 있는 속도를 먼저 대입해보고, 최종 정차 위치가 수렴할 때까지 반복함
step 4 - 충돌 후 자차 주행 속도 추정
뉴턴의 제 2법칙의 일과 에너지의 원리를 기반으로 자차의 충돌 이후 미끄럼 단계의 속도를 추정함
차량에 탑승자와 추가로 싣는 물건은 없다고 가정하여 차량의 제원 무게(m)를 반영함
step 5 - 정차 위치 수렴을 위한 파라미터 결정
사고 현장 다이어그램의 표기된 차량의 정차 위치와, 시뮬레이션 환경에서 구성한 속도로 주행할 경우 차량의 정차 위치의 차이가 최소 값으로 수렴될 때까지 반복
자차와 방해차의 위치 오차 값을 파라미터로 설정함
고위험 시나리오 생성 결과
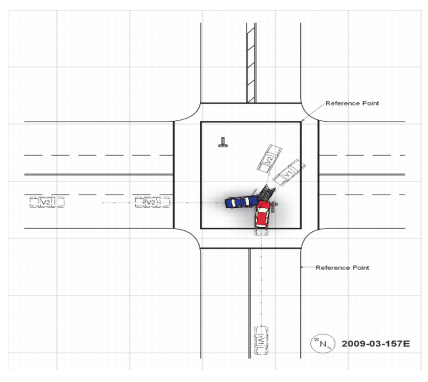
NASS-CDS에서 제공하는 사고 데이터를 분석한 결과 교차로 환경에서 직각 충돌이 가장 많은 횟수로 발생하였음
충돌 시뮬레이션에서 제공되는 역공학 과정을 통하여 확인된 속도와 비교하였을 때 85~90%의 유사성이 보이는 것을 확인할 수 있었음
정리
- 고위험 시나리오를 개발하기 위해서는 사고 현장 다이어그램이 필수적으로 확보되어야 하나 개인 정보 문제로 인해 NASS-CDS에서 제공하는 사고 데이터를 활용하였음
- 5개의 step으로 구성된 고위험 시나리오를 개발하고, 나온 결과를 충돌 시뮬레이션을 사용하여 비교 및 검증을 진행하였음
- 85~90%의 유사성을 확인하였으므로 기존의 차량 충돌 시뮬레이션 SW를 활용하여 시나리오 개발자의 반복적인 과정을 상당 부분 해소할 수 있을 것으로 보임
논문 링크
https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE11724815
