논문 리뷰
1.정밀도로기반 자율주행 테스트베드용 VILS 시스템 구현

연구 주제 정밀도로지도 기반 자율주행 테스트베드용 VILS 시스템 구현 방법이 대한 제안 HD map을 이용하여 VILS(Vehicle-in-the-Loop) 시스템의 구현 및 검증을 목표로 둠 충청북도 오창에 위치한 테스트베드에서 VILS를 구현하였고, 이를 바탕으로
2.Prescan을 활용한 실차 실험 기반의 AEB 작동 시뮬레이션에 관한 연구
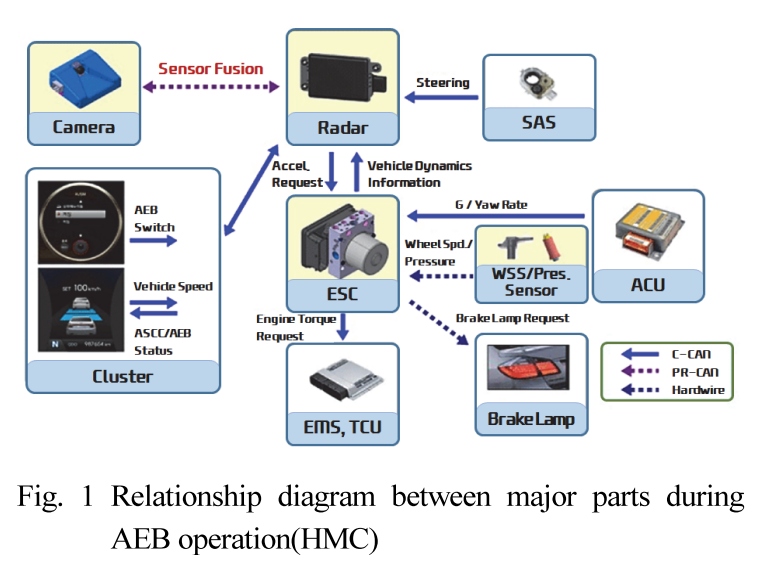
AEB 시뮬레이션을 해보고, AEB 관련 교통사고 분석을 기반으로 사고 재건 시뮬레이션 확보최근 생산되는 차량에는 안전장치를 의무적으로 설치하고 있어 ADAS를 대표하는 장치인 AEB의 작동 특성을 파악하기 위해AEB는 차량 결함 여부, 운전자 과실 여부 및 사고 회피
3.자율주행 차량을 위한 멀티 레이블 차선 검출 딥러닝 알고리즘
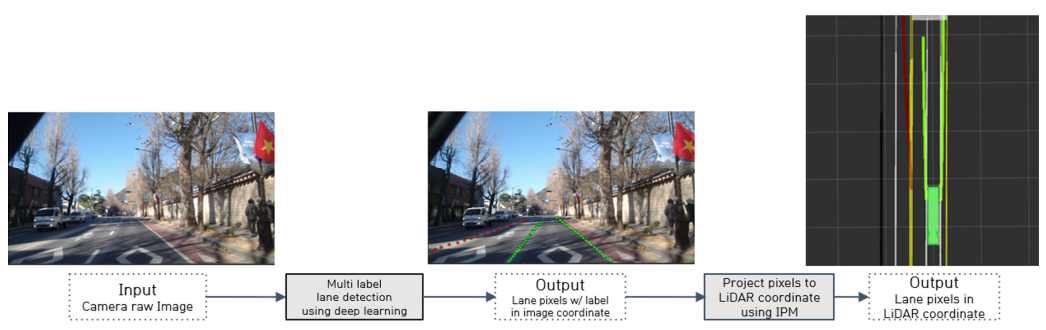
연구주제 딥러닝 기반의 자율주행 차량에서 카메라로 차선을 인지할 때, 딥러닝을 사용하여 개발한 인지 알고리즘의 유용성과 효율성 증명 연구가 필요한 이유 자율주행 차량이 주행할 때 HD Map과 고정밀 GPS를 사용하면 과도한 시간적, 경제적 비용을 필요로 함 인식한
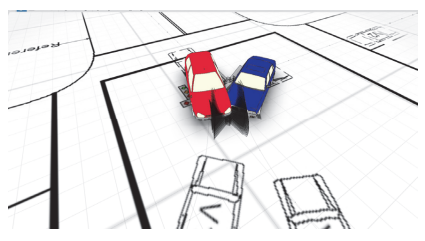
4.가상환경 내 자율주행 차량 데이터 취득을 위한 CARLA 기반 테스트 시나리오 제안
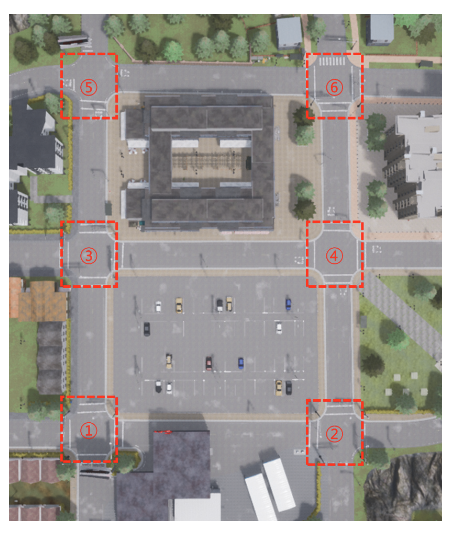
가상환경(Carla)에서 자율주행 차량 데이터를 취득하는 테스트 시나리오를 제안함실제 도로 상황은 다양한 변수에 의해 예측하기 어려운 상황이 수시로 발생하며, 테스트를 위한 기반 시설을 구축하는 것은 상당한 비용과 위험 상황을 구현하는데 현실적인 제약이 존재함시뮬레이션
5.자율주행자동차 검증을 위한 고위험 시나리오 개발 방법론에 관한 연구
자율주행 자동차의 안전 기능을 평가하고 검증하는데 사용할 수 있는 합리적인 고위험 시나리오를 생성하는 방법론 제안1\. 현재 양산되고 있는 LV.2 수준의 ADAS 기능의 경우 평가 방법, 절차 및 사용 장비까지 프로토콜의 형태로 정의하고 있으나, 자율주행 자동차가 주
6.자율주행 횡방향 제어를 위한 Gaussian Processes 기반의 차량 모델 개발
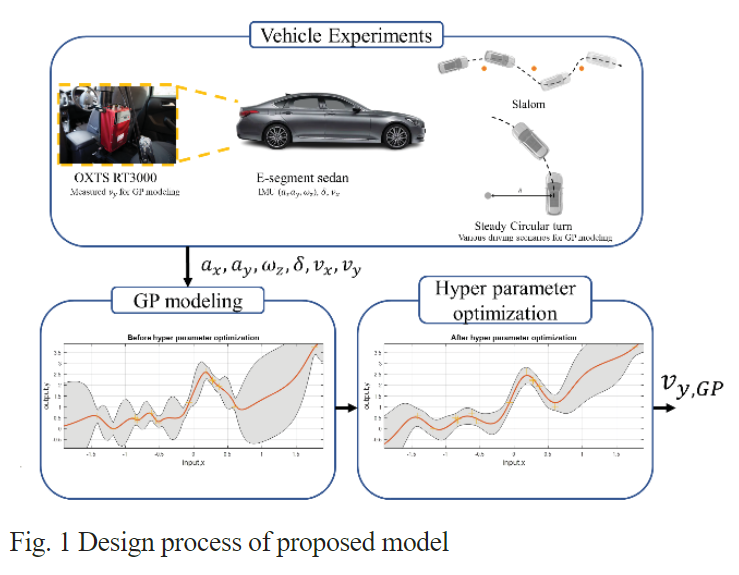
자율주행 차량 횡방향 제어에 사용되는 Bicycle 모델의 단점을 극복하기 위해 Gaussian Processes 기반의 차량 횡방향 모델 생성 방법 제안1\. 차량 모델의 정합성을 향상시키기 위해 머신러닝/딥러닝 기술을 활용한 연구들이 제안되고 있음2\. 특히 DNN
7.자율주행 자동차 사고 데이터 기반 사고 요인 도출 연구
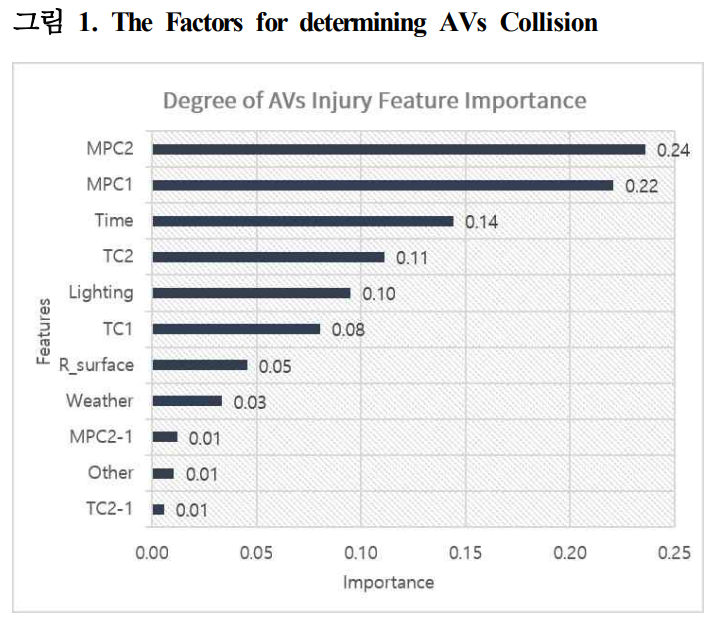
자율주행 자동차 실사고 데이터를 기반으로 사고를 결정하는 사고 요인 도출이상적인 상황에서도 자율주행 자동차 사고의 발생 가능성에 대한 연구가 제기됨 -> 상용화가 지연되고 있음실제 데이터를 활용한 시나리오 도출 연구가 다양하게 수행되고 있으나, 무수히 많이 도출될 것으
8.차량 내,외부 데이터 및 딥러닝 기반 차량 위기 감지 시스템 설계
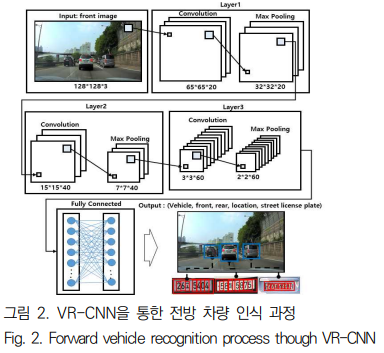
연구 주제 CNN을 사용하고, 저장된 정보와 차량 센서 데이터를 이용하여 차량이 처한 위기 상황을 0~1 사이의 수치로 출력하는 위기 감지 시스템 제안한다. 연구가 필요한 이유 자율주행차량은 상용화를 앞두고 있지만 안정성의 문제로 완전 자율주행 중에도 사고가 발생할 수