연구 주제
자율주행 차량 횡방향 제어에 사용되는 Bicycle 모델의 단점을 극복하기 위해 Gaussian Processes 기반의 차량 횡방향 모델 생성 방법 제안
연구가 필요한 이유
- 차량 모델의 정합성을 향상시키기 위해 머신러닝/딥러닝 기술을 활용한 연구들이 제안되고 있음
- 특히 DNN을 활용한 방법들이 제안되고 있으나, DNN의 경우 많은 양의 학습 데이터가 요구되고, parametric model 특성으로 인해 메모리를 많이 차지하는 단점이 있음
- DNN의 단점을 극복하기 위해 non-parametric model 방법 중 하나인 Gaussian Process(GP)를 활용하여 기존 모델 사용 대비 성능을 높임
결론
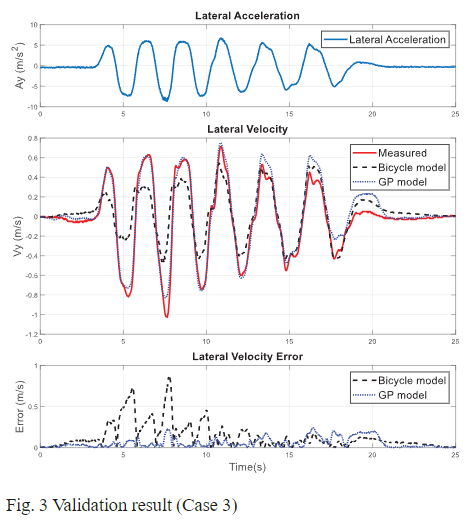
- 기존 자율주행 횡방향 제어기에 주로 사용되는 Bicycle model은 횡가속도가 작은 영역에 있어서는 유효한 성능을 보이지만, U-Tum, Slalom과 같은 상황에는 오차가 존재함
- GP 기반 모델은 예측 오차에 대한 공분산을 제공하기 때문에 MPC에 적용하면 기존 모델 대비 성능을 향상시킬 수 있음
- 하지만, 해당 모델을 횡방향 제어기에 적용하기 위해서는 yaw rate에 대한 추가적인 모델 설계가 필요함
- GP는 학습 데이터에 존재하지 않는 새로운 주행 상황에 적용하는 경우, 오차가 크게 발생할 수 있음
- 추후 주행상황에 가변하여 적용되고, 적은 양의 데이터를 통해 모델을 구축할 수 있도록 online sparse model로 개선할 예정
논문 내용
서론
자율주행 제어 방법에 대한 연구들은 주로 차량의 움직임을 모사하는 차량 운동학(kinematics)/동역학(dynamics) 모델을 사용하여 설계함
차량 모델의 정합성은 제어 성능과 연관되어 있음
횡방향 제어의 경우 널리 알려진 Bicycle 모델을 사용하고, 해당 모델의 uncertainty, disturbance로 인해 robust, adaptation에 대한 연구가 활발히 진행 중
최근 모델의 경합성을 향상시키기 위해 머신러닝/딥러닝 기술을 사용한 연구를 많이 하는 편임
DNN을 사용하면 기존 모델 대비 개선된 성능을 볼 수 있으나, 많은 양의 학습 데이터가 필요하고, parametric model 특성으로 인해 메모리를 많이 차지하는 단점이 있음
실제 차량을 이용하여 학습 데이터를 취득하는 과정은 많은 시간과 비용이 소모되므로 현실적인 어려움이 존재함
이러한 단점을 극복하기 위해 Gaussian Process(GP)를 활용한 모델 개선을 하려고 함
GP는 DNN 대비 적은 양의 데이터로 생성 가능하며, 실시간 학습도 가능한 것으로 알려져있음
참 값과의 정합성, 예측 성능에 대한 공분산(covariance)을 출력할 수 있으므로 MPC(Model Predictive Control)에 적용하여 기존 모델 사용 대비 성능을 향상시킬 수 있음
본 논문에서는 자율주행 차량 횡방향 제어에 사용되는 bicycle model의 단점을 극복하기 위해 GP 기반의 차량 횡방향 모델 생성 방법을 제안함
차량의 주행에 따라 오차가 크게 발생하는 횡속을 GP를 활용하여 모델링 하고, 실차 데이터 적용을 통해 bicycle model과의 비교를 통해 GP 기반의 model을 검증하였음
차량 횡방향 모델
차량의 yaw rate는 차량에 탑재된 센서로 계측 가능함
하지만 횡속은 다양한 방법으로 추정하여 차량 제어에 사용됨
bicycle model은 모델 간소화를 위해 코너링 강성계수와 슬립각의 곱을 통하여 차량의 횡력을 구성하고, planar motion만을 표현함
하지만 모델 간소화로 인해 횡가속도가 커질수록 모델의 오차는 증가함
따라서 bicycle model은 일반적인 주행상황(횡가속도 0.2G 미만)에서는 합당한 성능을 도출할 수 있으나, 횡적 거동이 큰 주행상황(U-turn, Slalom 등)에서는 제어기 성능 악화가 일어날 수 있음
Gaussian Process 기반 차량 횡방향 모델
Gaussian Process
Gaussian Process(GP)는 입력과 출력에 대한 데이터셋을 이용하여 함수를 근사(function approximation)하는 방법
특히 GP는 DNN보다 사용하는 데이터가 적고, 예측에 대한 공분산이 도출되어 예측 오차에 대한 정보를 알 수 있음
다양한 횡가속도 범위를 적용하여 학습하는 경우, 유효한 모델을 구성해볼 수 있음
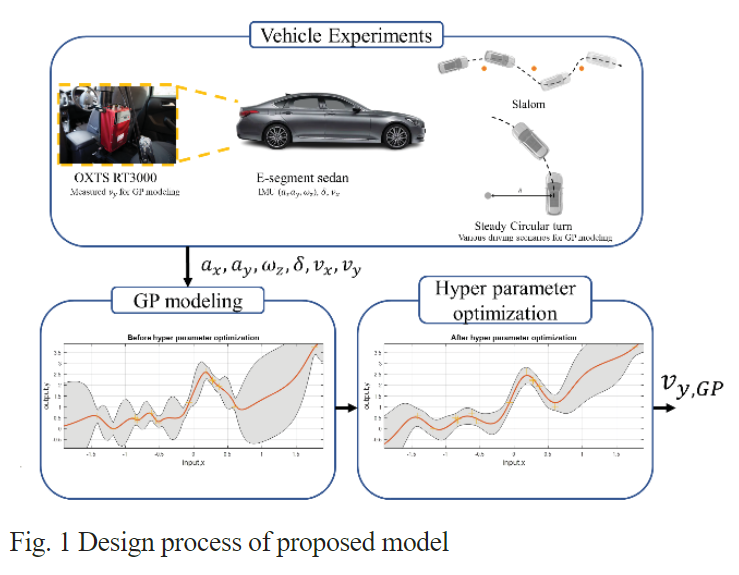
횡속을 도출하는 모델을 근사하기 위해 횡방향 거동과 관련된 계측 값인 종/횡가속도, yaw rate, steering angle, car speed 등을 계측하여 모델 근사에 사용하였음
GP 구축을 위한 데이터 선정
차량 횡방향 모델을 근사하기 위해서는 다양한 횡방향 주행에서 계측한 데이터가 필요함
국산 E-segment 세단을 이용하여 정상 선원회, 차선 변경, slalum 테스트로 다양한 데이터를 계측하였음
차량의 횡속은 RT3000으로 계측하였고, 종/횡가속도, steering angle, yaw rate는 차량 CAN data로 취득하였음
bicycle 모델이 유효한 횡가속도가 작은 영역부터 마찰 한계에 가까운 영역까지의 데이터를 GP 구축을 위한 데이터로 선정하였음
Hyper parameter 최적화
구성한 GP는 랜덤 프로세스들의 집합으로 표현되어 있어 커널을 구성하는 hyper parameter는 근사하고자 하는 출력과의 에러를 최소화하는 값으로 결정해야 함
해당 과정은 matlab gpml toolbox를 활용하여 GP 모델을 구성하였고, optimization toolbox를 이용하여 gaussian process의 hyper parameter를 최적화 하였음
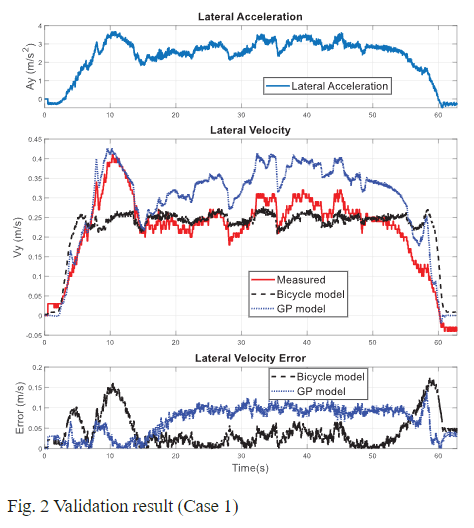
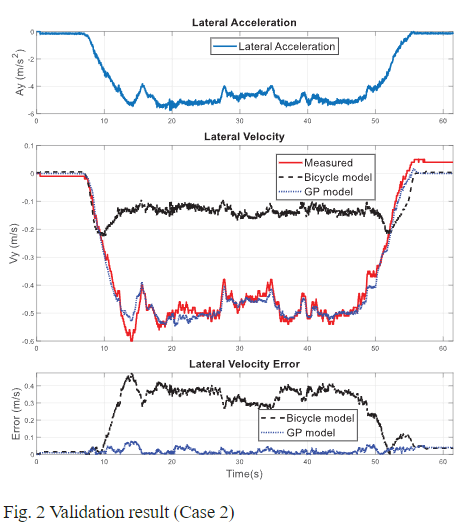
모델 검증
실차 데이터를 이용하여 GP 기반의 차량 횡방향 모델을 검증하였음
GP 기반의 차량 횡방향 모델을 검증하기 위해 bicycle model과 비교하여 오차를 구하였음
논문에서 제안하고 있는 GP 기반의 모델은 계측 값과 유사한 결과를 도출하고 있으며, 0.1m/s 미만의 오차를 가짐
정리
- 자율주행 횡방향 제어를 위해 bicycle model을 사용하는데, DNN을 활용하여 사용 시 단점이 존재함
- 단점을 극복하기 위해 Gaussian Process(GP)를 사용하여 모델을 구성하였음
- 구성한 모델을 실차 데이터를 이용하여 검증한 결과, 계측 값과 유사한 결과를 보여 기존 모델 대비 성능을 향상시킬 수 있었음
논문 링크
https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE11665984
