LPV 시스템은 시간에 따라 변하거나 외부 조건에 따라 변하는 파라미터를 가지지만 각 파라미터 마다 고정되어 있다고 생각하면 그 값으로 선형 시스템을 표현할수 있는 모델
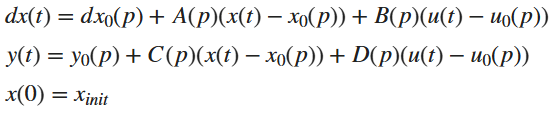
LPV 시스템은 다음과 같은 수학적으로 표현할수 있음
각각에 대한 설명을 하면
- u(t)는 시간 t에서의 입력
- y(t)는 출력
- x(t)는 시간 t에서의 상태 벡터
- dx(t)는 연속시간 시스템으로 상태의 시간 미분
- A,B,C,D는 파라미터 p에 대한 상태공간 행렬로 현재 파리미터 값 p에 대한 시스템이 어떤 선형 모델인지 정의
- p=p(t)는 스케줄링 파라미터로 시간에 따라 변하는 측정 가능한 값으로 시스템의 선형성에 영향을 주는 외부 변수
- x₀(p), u₀(p), y₀(p), dx₀(p)는 앞서 말한 파라미터 p에서의 기준값을 의미하여 상태, 입력, 출력, 기준 상태 변화를 p에서의 기준으로 값이 바뀜
예제1 - LPV System 블록을 사용하여 선형 파라미터 가변 시스템 시뮬레이션하기
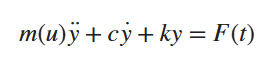
해당 부분에 질량이 외부 하중 명령의 함수에 의해 변하는 선형 질량 스프링 댐퍼 시스템으로 가정함 해당 방정식은 상단과 같음
- m : 외부 명령 u에 종속된 질량임
- c : 감쇠비
- k : 스프링의 강성
- u : 1볼트에서 10볼트로 입력값의 범위를 선정
- F(t) : 가해지는 입력
해당 질량과 입력간에 관계는

이렇다고 가정함
c = 5;
k = 300;
u = 1:10;
m = 10*u + 0.1*u.^2;
for i = 1:length(u)
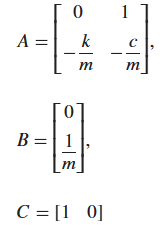
A = [0 1; -k/m(i), -c/m(i)];
B = [0; 1/m(i)];
C = [1 0];
sys(:,:,i) = ss(A,B,C,0);
end

ss(A,B,C,D) 같은경우 상단에 상태방정식을 뜻하는 것임
- A = [0 1; -k/m(i), -c/m(i)]; 해당 부분은 상태공간에 A행렬을 뜻함
- B = [0; 1/m(i)]; 해당 부분은 상태공간에 B행렬을 뜻함
- C = [1 0];
해당식은 이렇게 도입
이것으로 질량의 위치 y(t)를 사용
sys.SamplingGrid = struct('LoadCommand',u);
- 해당것으로 u에 들어가 있는 1~10의 값들을 SamplingGrid를 하여 sys(:,:,i)에 해당하는 파라미터 값과의 연결관계를 matlab에게 알려준다고 생각하면됨
model = "simMSDLPV";
open_system(model);
기존에 있는 simMSDLP모델 변수를 만들고 열는 거임
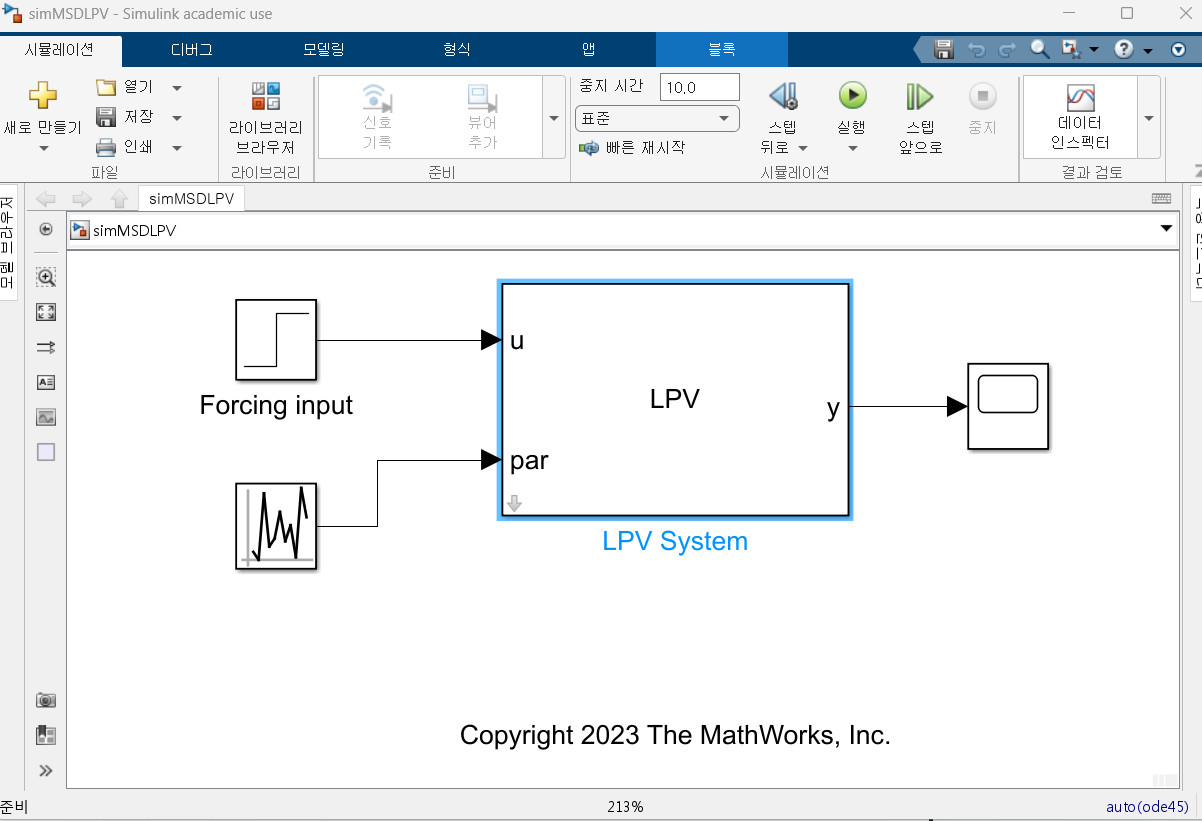
그러면 해당 부분이 나오는데
LPV Block을 확인하면
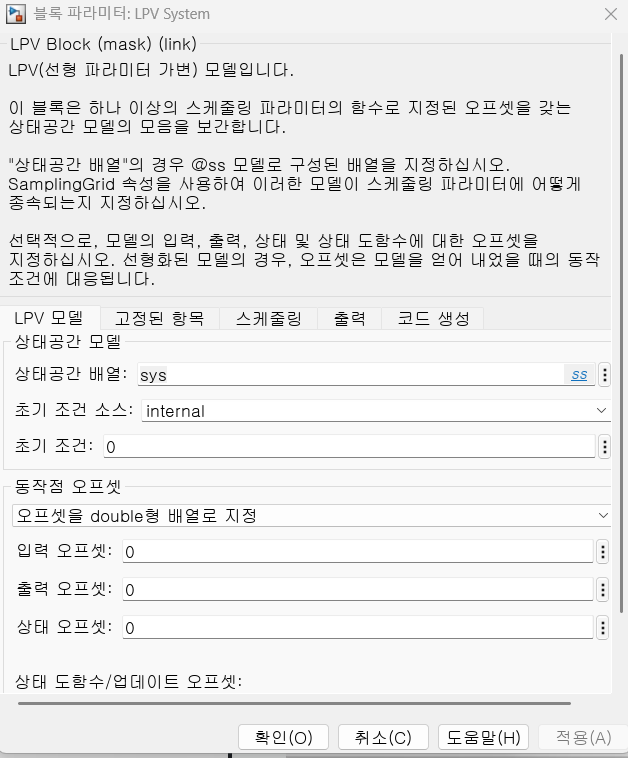
상태공간 배열: sys 기존에 활용한것이고
-
internal - Simulink 내부에서 초기 상태 x(0)을 0 또는 지정된 값으로 설정
-
external - 입력 포트를 통해 초기 상태를 외부에서 넣을 수 있음
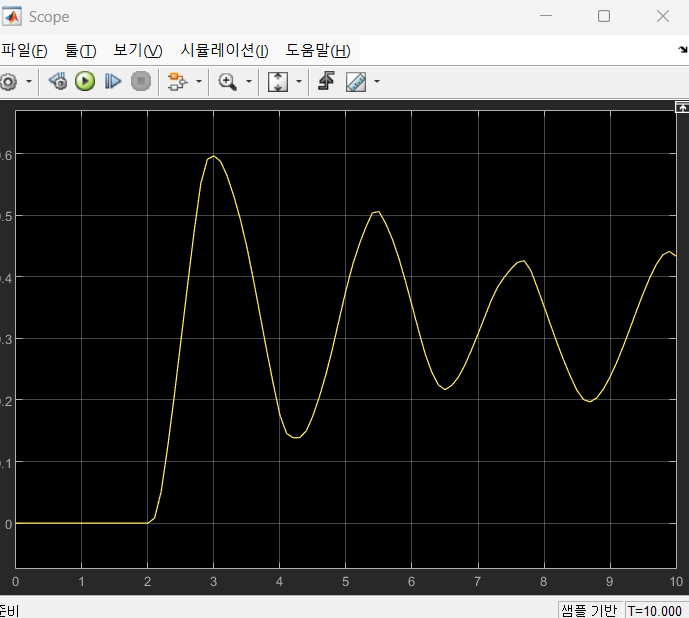
해당결과처럼 나옴
예제2 - 비선형 모델과 LPV 블록 응답 비교하기

#자기공부 #틀린것도많음 #자기개발 여러분 인생이 힘들다 하더라도 그것을 깨는 순간 큰 희열감으로 옵니다~