control_system
1.PID SIMULINK
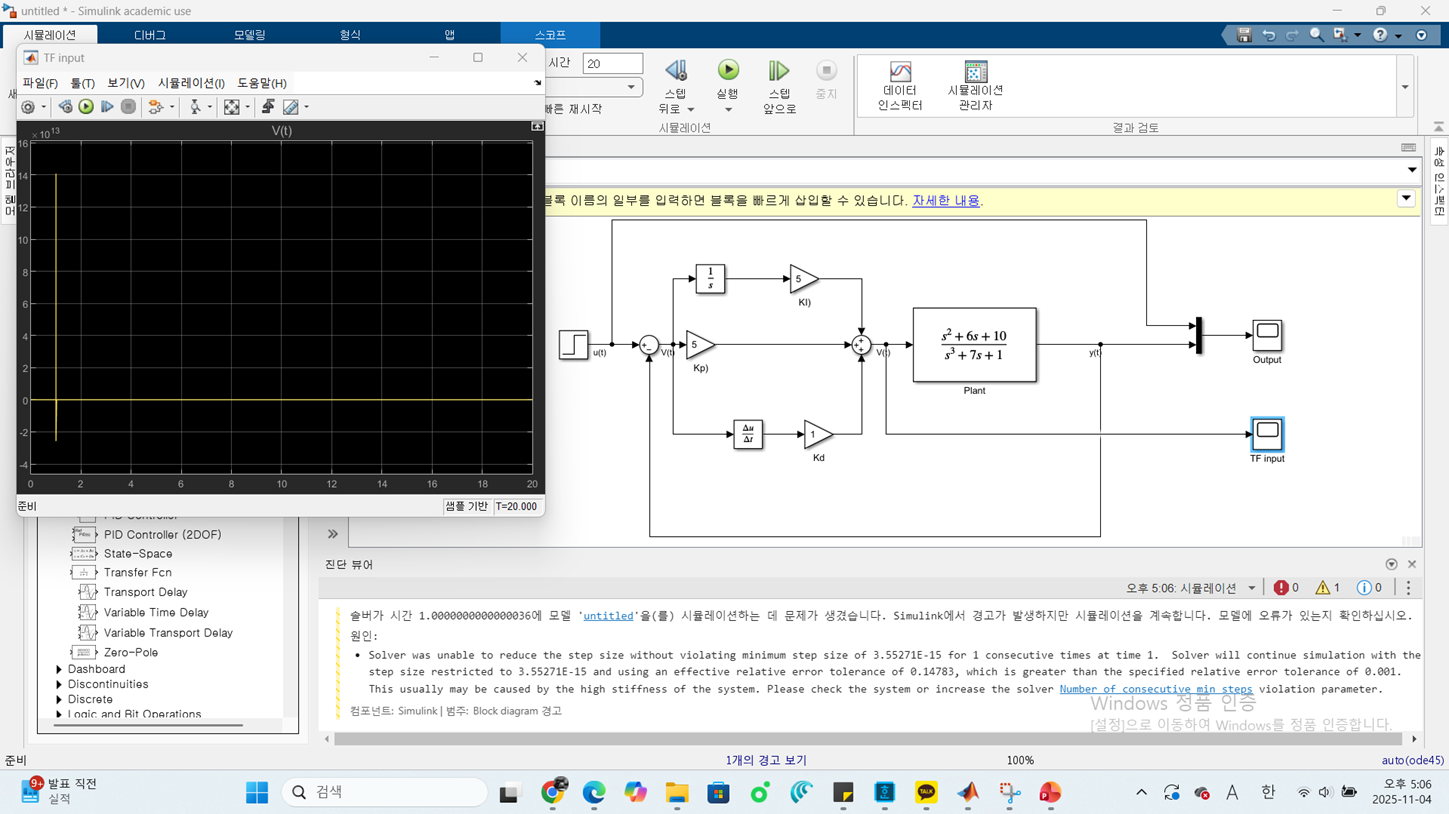
PID 제어(PID Control)는 비례(Proportional), 적분(Integral), 미분(Derivative) 세 가지 항을 이용해 시스템의 오차를 보정하는 가장 기본적이면서도 널리 쓰이는 피드백 제어 방식임현재 오차(error) 크기에 비례하여 제어 입력을
2025년 11월 11일
2.Kalman Filter(칼만필터)
칼만필터 > *칼만 필터는 “수학적 모델(예측)”과 “센서 측정값(보정)”을 최적으로 결합하여 잡음이 있는 환경에서도 가장 신뢰할 수 있는 상태 추정값을 제공하는 알고리즘* 해당 수식이 칼만필터의 개념임 (각 알파벳위에 '-'가 있다면 추정값이라고 생각하면 됨)
2025년 11월 13일
3.Extended Kalman Filter(확장칼만필터)
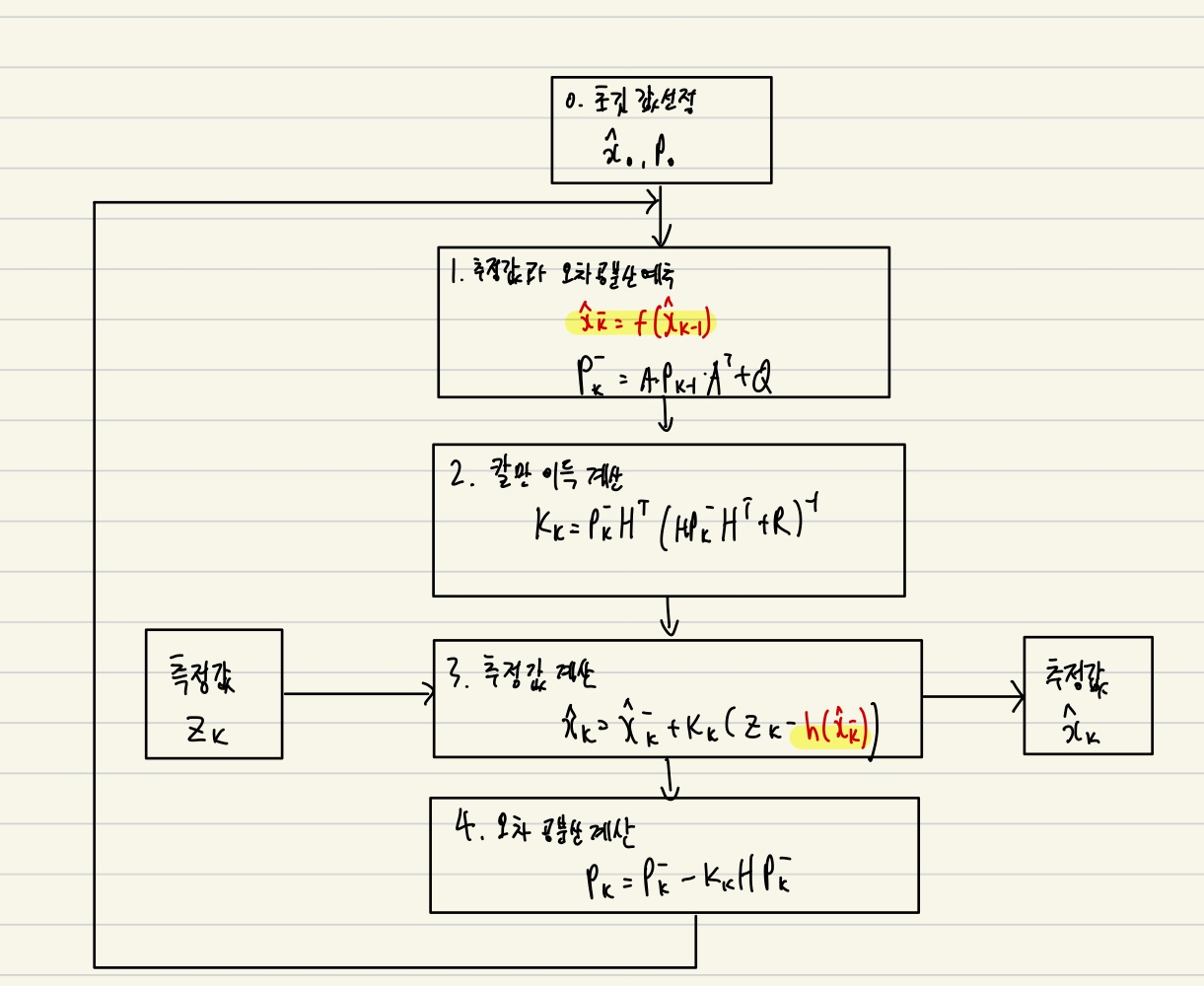
칼만 필터는 선형식일때 사용하면 되는 것이고 확장칼만필터는 비선형함수가 있는경우 이를 해결하기 위해 미분해서 선형으로 만들어서 사용하는 것해당 부분에서 선형과 다른 부분은 빨간색 부분만이 다른 부분임이부분이 비선형이 추가된것임$x^{0}$ : 처음 상태에 대한 '추정값
2025년 11월 17일
4.LPV 시스템
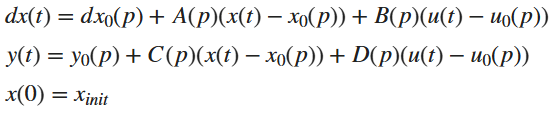
LPV 시스템은 시간에 따라 변하거나 외부 조건에 따라 변하는 파라미터를 가지지만 각 파라미터가 고정되거 있다고 하면 선형 시스템을 표현하는 시스템이다LPV 시스템은 다음과 같은 수학적으로 표현할수 있음각각에 대한 설명을 하면u(t)는 시간 t에서의 입력y(t)는 출력
2025년 11월 21일