📝전체 구성
-
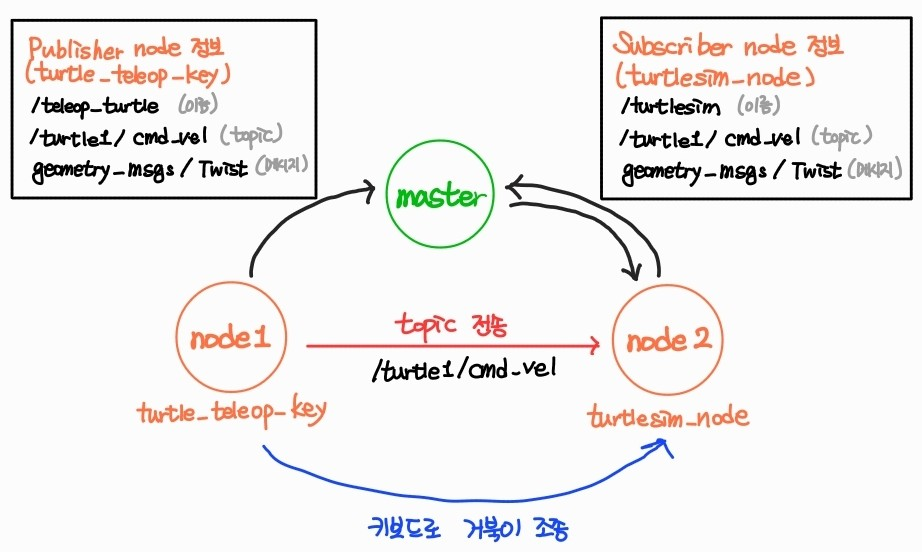
turtle_teleop_key: publisher node -
turtlesim_node: subscriber node -
/turtle1/cmd_vel: 노드가 주고 받는 topic -
geometry_msgs/Twist: topic 속 메시지
-
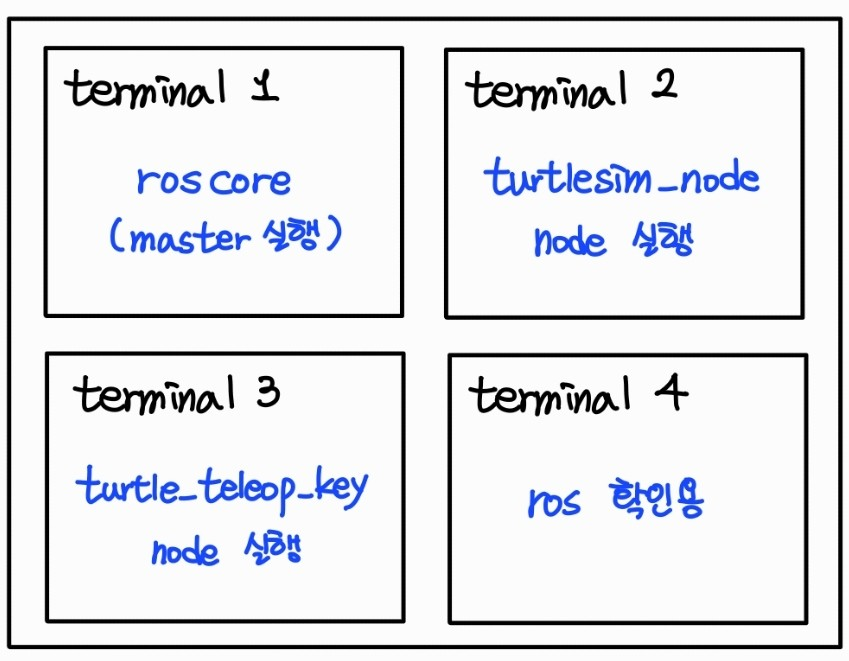
terminal을 여러개 열어서 실행시킨다
🐢turtlesim 거북이 이동시키기 실행
1. terminal 1 : 마스터 실행
$ roscore
2. terminal 4 : ros node 확인
$ rosnode list
/rosout: 항상 기동하는 기본적인 node로서 node들의 디버깅 정보를 가지고 있다
3. terminal 2 : turtlesim 패키지의 turtlesim_node 실행
- 실행하면 거북이가 나타난다!
$ rosrun turtlesim turtlesim_node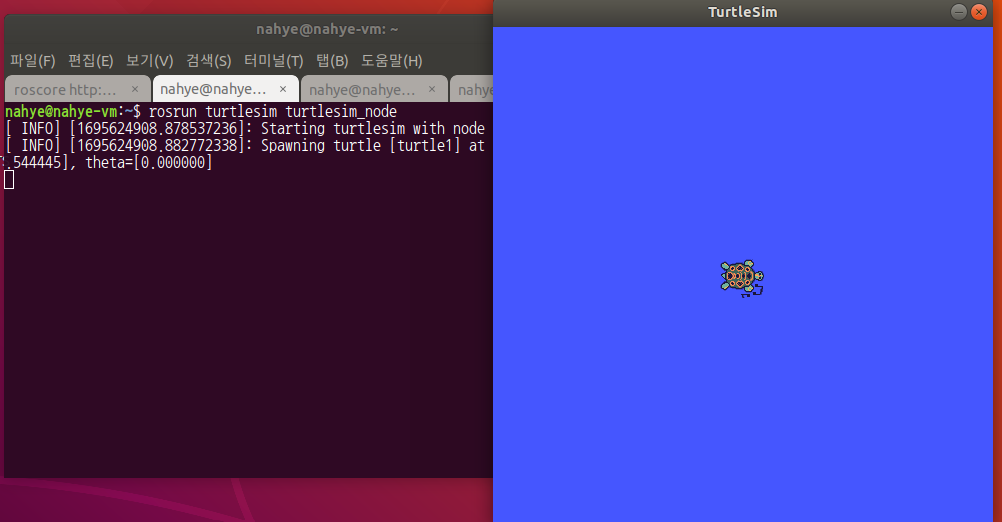
4. terminal 4 : ros node 확인
- turtlesim이 추가된 것을 확인
$ rosnode list
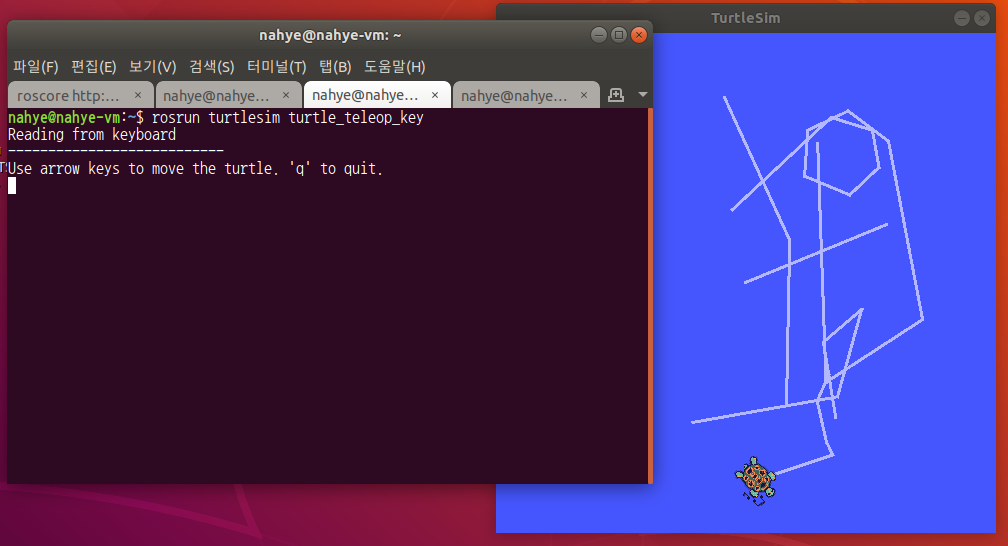
5. ternimal 3 : turtlesim 패키지의 turtle_teleop_key 실행
$ rosrun turtlesim turtle_teleop_key
6. terminal3 창이 활성화된 상태에서 키보드 방향키 입력
- 키보트 방향키 대로 거북이가 이동한다!
7. terminal 4 : ros node 확인
- teleop_turtle 추가된 것 확인
$ rosnode list
8. 시각화 확인하기
$ rqt_graph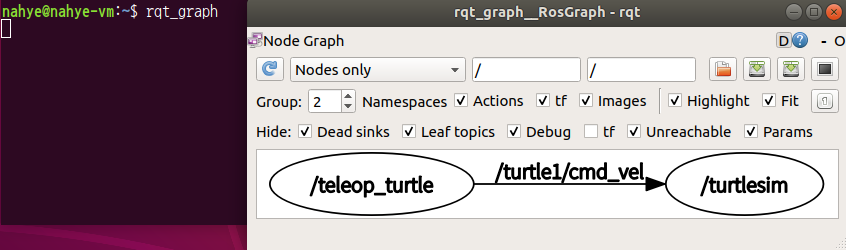
🔭topic 자세히 알아보기
위의 터미널들을 실행시킨 상태에서 확인해야 한다
1. rostopic의 옵션이 뭐가 있는지 확인
$ rostopic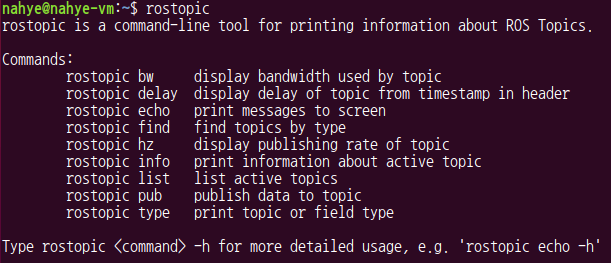
2. 어떤 topic이 날아다니는지 확인
$ rostopic list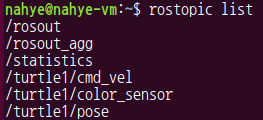
- 더 자세히 보고 싶다면
$ rostopic list -v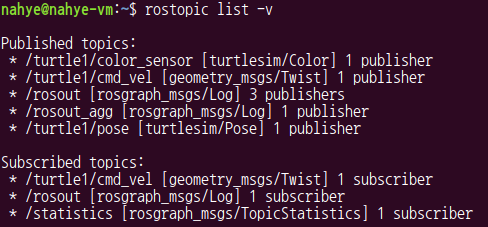
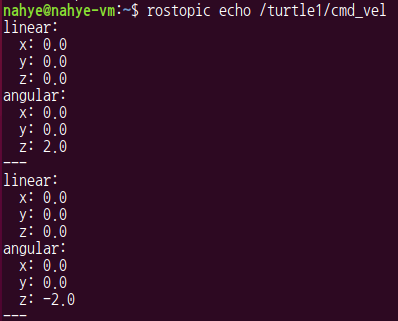
3. topic에 담긴 메세지의 내용 확인
$ rostopic echo /turtle1/cmd_vel - 실행 후 값이 안뜬다면 terminal3을 활성화하여 키보드 화살표를 움직이면 값이 뜬다.
- 값을 다 봤으면 ctrl+c 로 나오면 된다
4. topic 안의 메세지 type과 구성 확인
$ rostopic type /turtle1/cmd_vel
$ rosmsg show geometry_msgs/Twist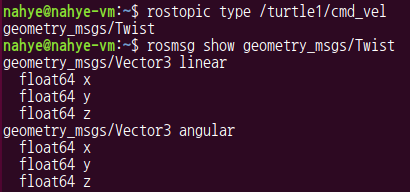
geometry_msgs/Twist라는 데이터 타입으로 구성되어 있다- geometry_msgs/Twist는 linear(선속도)와 angular(각속도)를 나타내는 float 6개의 값으로 구성되어 있다
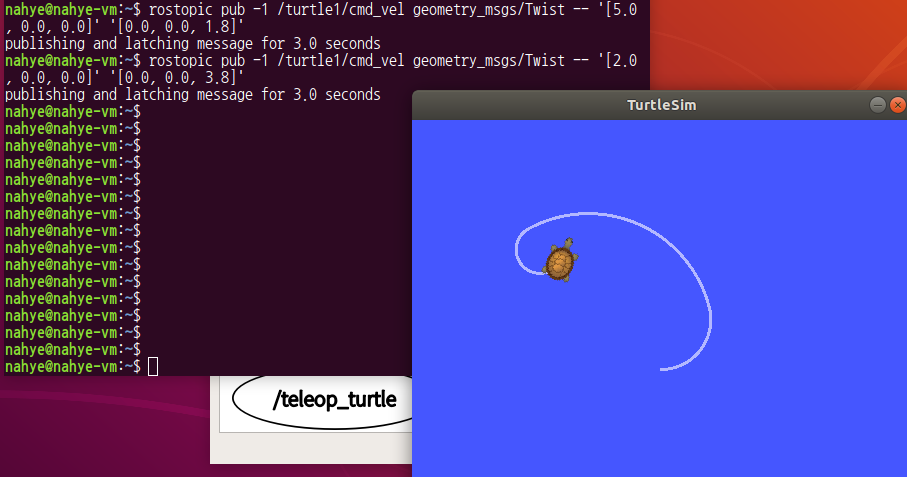
💡topic 직접 발행하여 거북이 이동시키기
topic 한번 발행
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'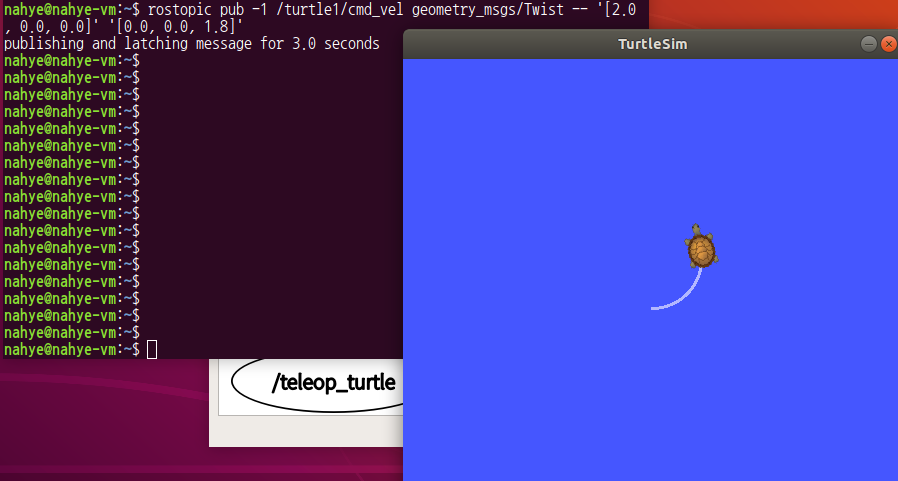
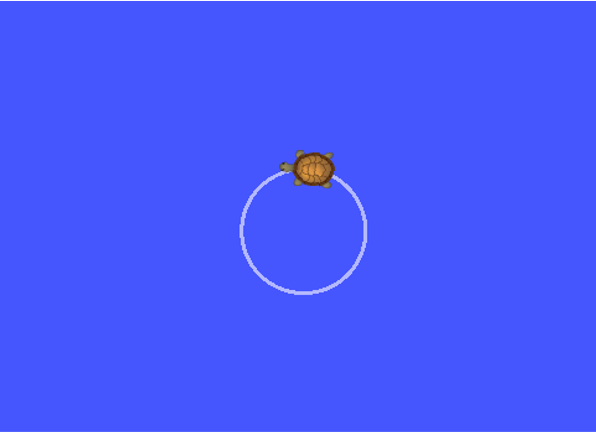
- 선속도(증가시키면 크게 회전)와 각속도(늘리면 회전반경이 짧아짐)의 값을 바꾸면 거북이가 다르게 움직인다.
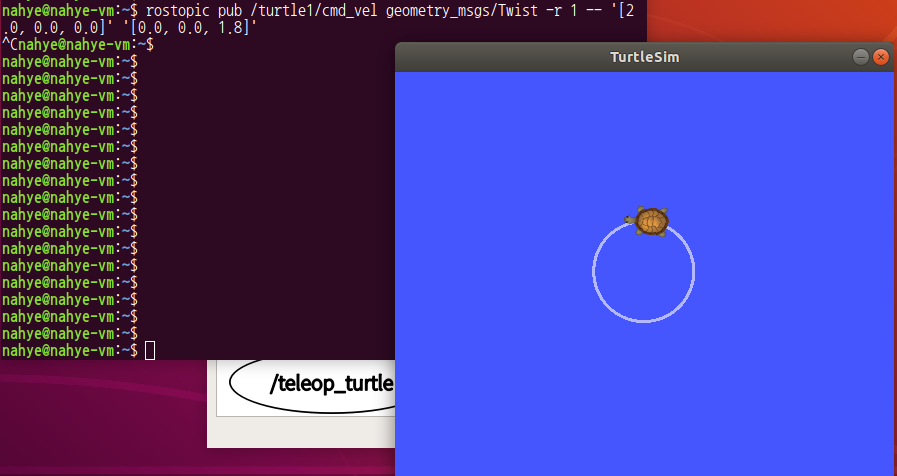
topic 여러번 발행
- 멈출 때는
ctrl+c로 정지
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'