2023.10.09 데브코스 14일차😵💫
앞으로 많이 다루게 될 라이다와 포음파 센서에 대해 배웠다!
강의를 듣고 실습을 진행했는데 실습을 수행하는데 시간이 너무 오래 걸린다ㅠㅠ
코드를 작성하는 것보다 오류를 수정하고 그 원인을 찾는데 시간이 오래 걸리는 것 같다.
📝배운 내용
🚨LiDAR 센서
- rosbag
- 라이다 센서가 없을 때 이용
- 라이다 구동 중에 실행 -> 토픽을 subscribe하여 저장(시간도 같이 저장)
- 파일 안의 데이터를 publish
- urfd
- 왼쪽 :
rpy="0 0 1.57" xyz="0 1 0 - 오른쪽 :
rpy="0 0 -1.57" xyz="0 -1 0 - 앞 :
rpy="0 0 0" xyz="1 0 0 - 뒤 :
rpy="0 0 3.14" xyz="-1 0 0 - 3.14 = 180도 -> radian으로 표현한다
- 왼쪽 :
🔊초음파 센서
- 소리 속도 : 초속 340m , 1cm 이동하는데 29us 소요
- 물체까지의 거리(m) = (340m 시간(초)) / 2 = 170 시간(초)
- 물체까지의 거리(mm) = 170 시간(초) /1000
- 시그널
- vcc : 전력 공급(+5V)
- GND : 그라운드 (-0V)
- Trig : 센서 동작 시작 시그널(입력)
- echo : 거리 측정 결과 전달 시그널(출력)
- 동작 시나리오
(1) 아두이노가 trig핀에 10us 동안 high신호(5V) 보냄
(2) 초음파 센서가 40kHz 초음파pulse를 8개 물체로 송신
(3) 물체에 반사된 초음파pulse가 초음파 센서로 수신
(4) 초음파 송수신 간의 시간 간격만큼의 pulse를 echo핀으로 출력 - 초음파센서 - 아두이노 - PC 연결
- 아두이노와 PC는 USB 케이블로 연결되지만 serial 통신을 한다 (Serial over USB)
😵어려웠던 점
rviz 파일 저장
- 문제
rviz 파일이 없는 경우 rviz를 실행하고 파일을 저장하고자 하면 경로 오류가 났다! 오늘 이걸 해결하기 위해 시간을 정말 많이 썼다...
- 원인, 이유
rviz 파일이 존재하지 않기 때문에 기본 경로?로 연결이 되는데 이 파일이 write 권한이 없기 때문에 오류가 나는 것 같다. 그리고 무엇보다 저장하고자 하는 경로와 다르다... - 해결 방법
에러난 상태에서 save를 누르고 현재 패키지 경로로 이동하여 즉, 경로를 다시 설정하여 저장하면 저장이 된다!
RVIZ 기반 LiDar data 시각화
- 목표
- lidar 데이터(LaserScan type)를 Range 데이터로 변환하여 RVIZ로 시각화
- 4방향(앞뒤좌우)에서의 거리 정보를 시각화
- urdf 파일도 작성하여 모델링 수행
- 문제
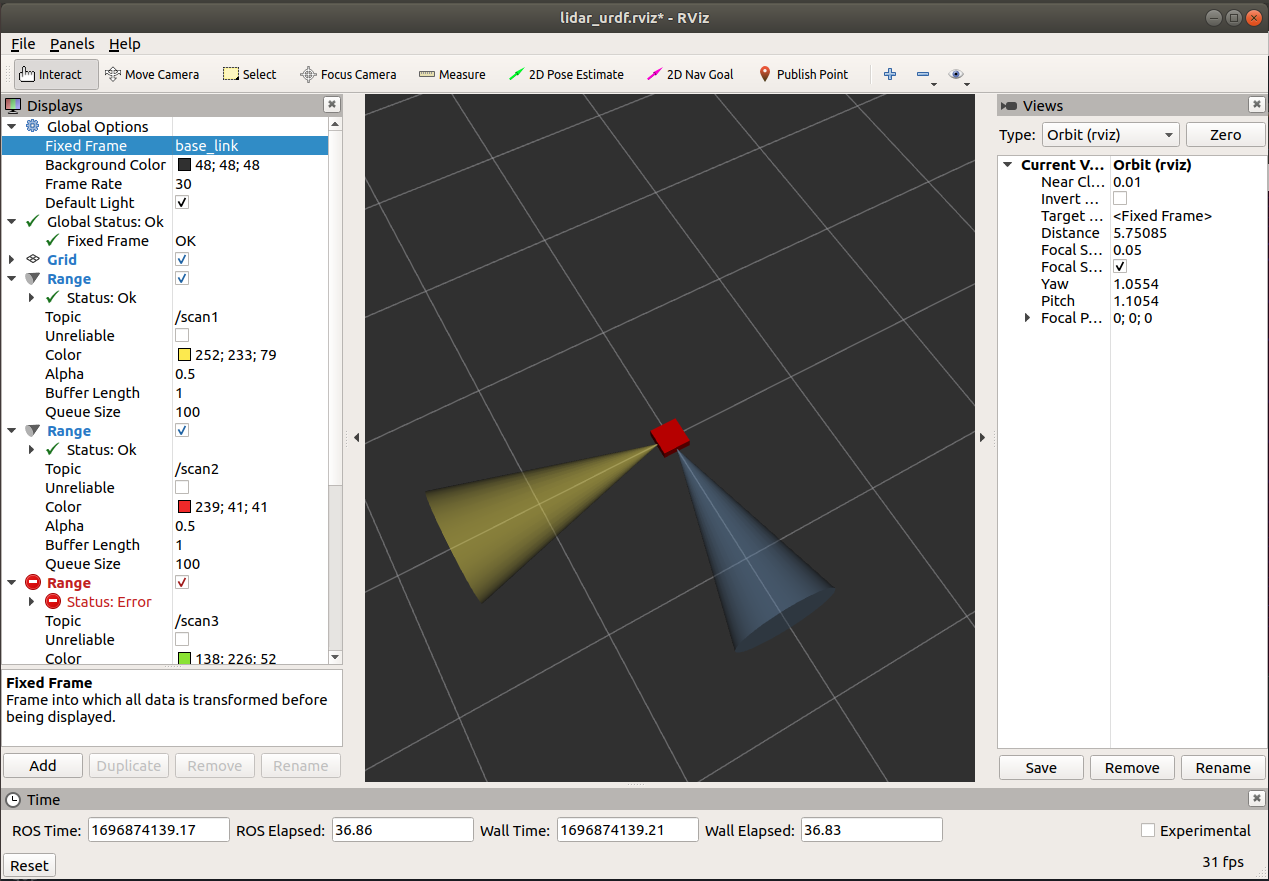
처음에 구현하였을 때 아래와 같이 4방향이 아닌 한방향에서 시각화가 되었다.
- 원인, 이유
전달되는 토픽과 urdf 모델과 연결이 되지 않아서 데이터가 모델에 제대로 적용되지 않은 것 같다. TF를 제대로 공부하면 정확히 그 이유을 알 수 있을 것 같다. 일단 내 생각으로는 launch 파일에서 robot_state_publish를 설정하는데 이것이 tf를 수행한다. tf는 좌표계끼리의 관계를 정의해주는 것이기 때문에 이 상황에서는 frame_id와 urdf name을 보고 이들의 좌표계를 연결해준다고 생각했다. - 해결 방법
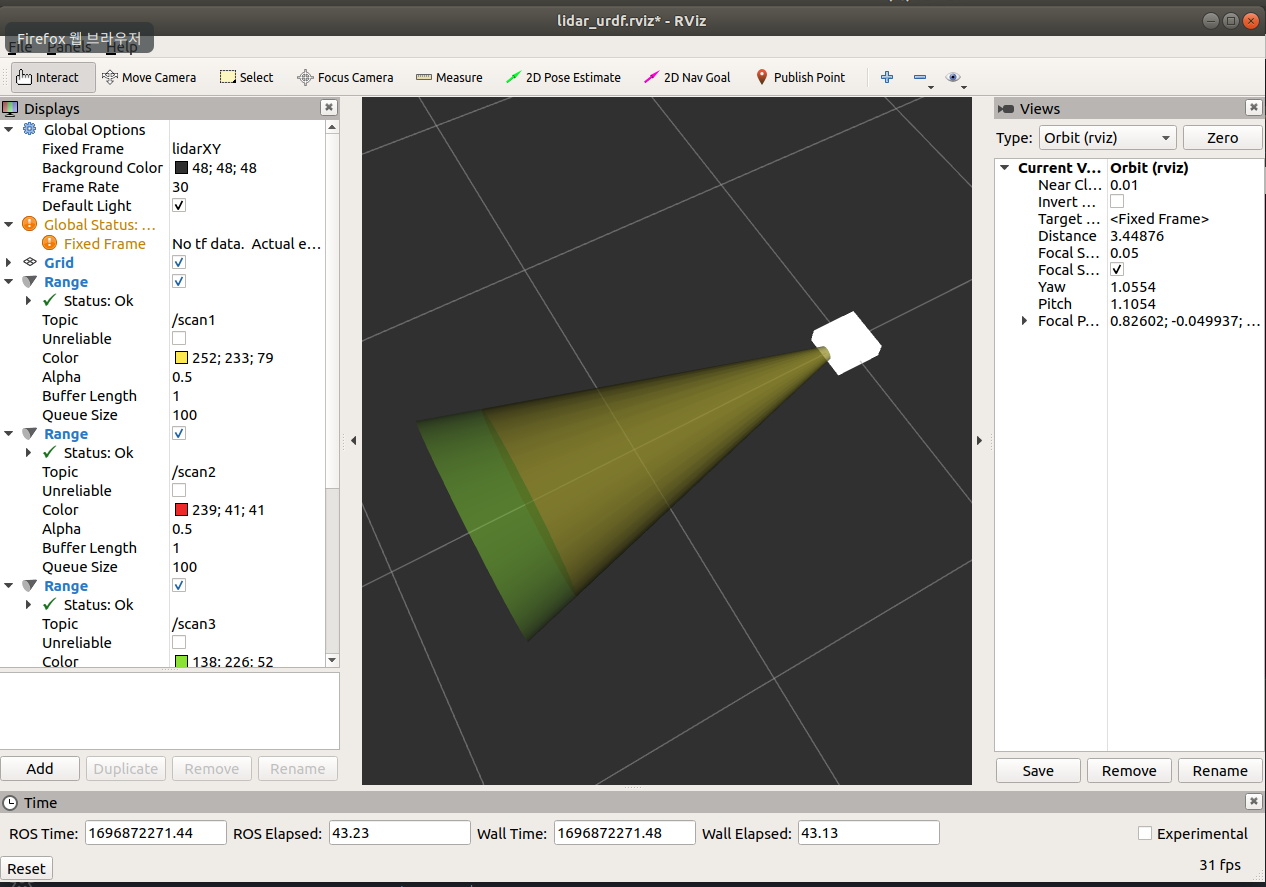
토픽 메시지의 frame_id와 urdf 파일에서의 link name을 각각 똑같이 설정한다.