2023.10.08 주말 TIL🤯
어제 이해가 안되고 부족했던 각속도에 대해 공부했다.
각속도 계산을 어떻게 하는지, 구현은 어떻게 하는지, 이를 통해 현재 차량의 위치를 어떻게 계산하는지에 대해 공부했다. 유튜브 강의를 찾아보고 자료들을 찾아보았는데 영어 자료가 많아서 영어를 더 잘하면 좋겠다는 생각을 했다...
사실 아직도 100% 완벽히 이해하지는 못했지만 잘못 이해하고 있던 부분들이 있었고 어떤 흐름으로 구현되는지에 대해서는 알게되었다. 이 부분은 자율주행의 제어 부분이여서 강의 때 자세히하지 않은 것 같았다. 동역학..물리..이런 지식들을 갖고 있으면 이해하기 훨씬 쉽겠다는 생각과 제어 분야는 나에게 조금 어려운 분야라는 생각도 들었다. 이 분야를 제대로 공부하기에는 쉽지 않겠지만 알고 있는 것이 좋을 것 같기 때문에 틈틈히 모르는 부분들을 찾아서 공부해야겠다.🤓
추가적으로 선택강의였던 URDF 강의와 실습도 진행했다.
📝공부한 내용
각속도, 차량의 위치 계산하기
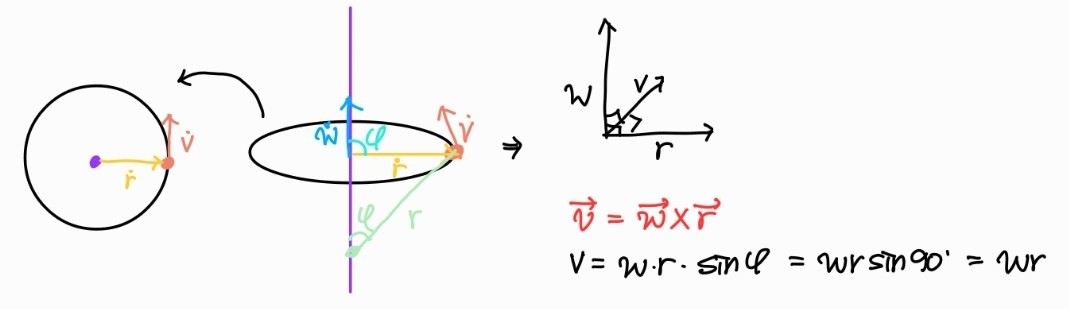
- 각속도 = 각의 회전 속도 = =
- 속도 = 반지름 각속도 = =
- 속도, 각속도, 거리는 서로 직각 관계. 따라서 각속도와 길이를 외적하면 속도가 된다
- 이건 정확하지 않을 수 있지만... 내가 이해한 것으로는...
- : steering angle 즉, 앞으로 나아갈 방향으로 와 같은 의미
- : 축간 거리, 앞에서 계속 봤던 과 같은 의미
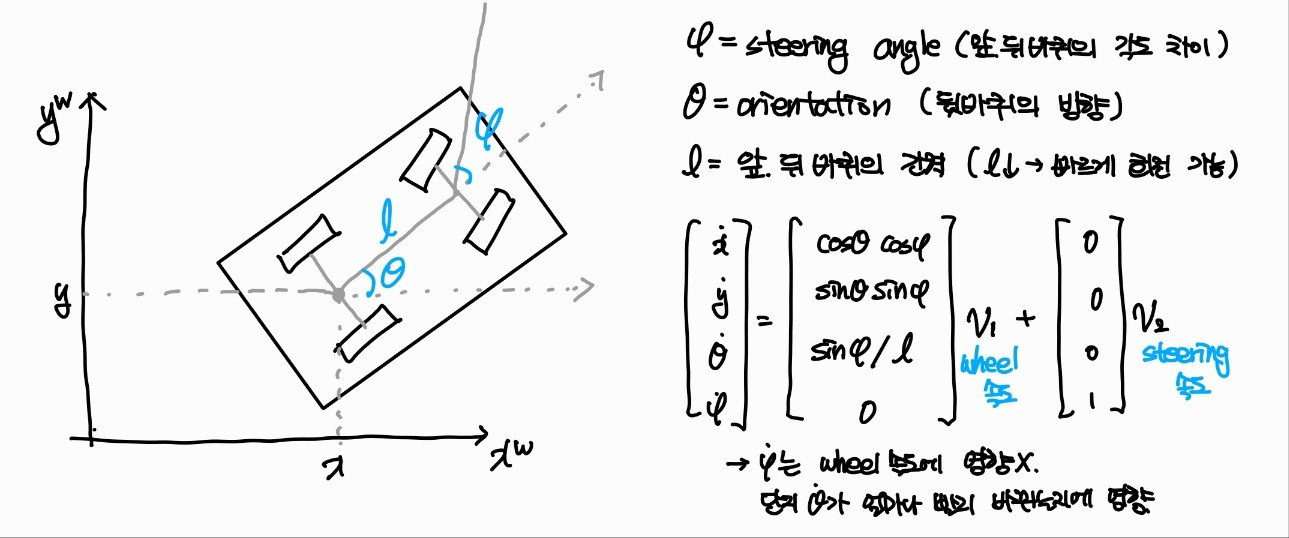
- 구현
- 각속도() = 현재 속도 tan(Angle) / 축간거리
- = 현재 속도 (yaw_)
- = 현재 속도 (yaw_)
- x_ = dt
- y_ = dt
- yaw_ = 각속도 dt
URDF 모델링
모델링을 하고 rviz로 확인하고 움직이는 것을 보는 것이 재밌다!
위치 정보를 설정하는 부분이 조금 헷갈렸다.
- joint는 앞의 joint 기준, link도 앞의 joint 기준으로 위치 설정
- x, y, z, roll, pitch, yaw 값으로 모든 위치와 방향 설정 가능
😵어려웠던 점
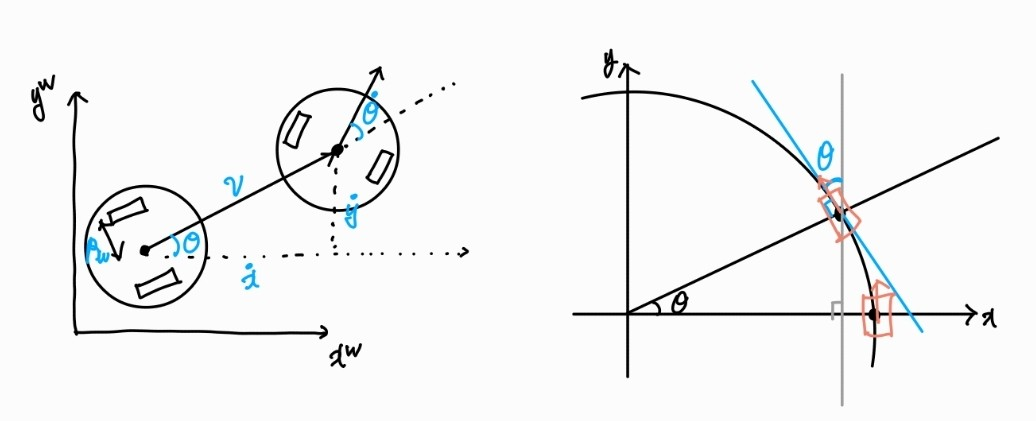
차량의 이동 위치를 계산할 때 가 무슨 의미인지 이해가 잘 되지 않았다. 그 이유는 차량의 현재 방향과 steering을 통해 변화할 방향을 혼동해서 생각했기 때문에 이해가 어려웠던 것 같다. 또한 처음에 이를 구현할 때 yaw를 각도가 각속도라고 생각하여 이해가 가지 않았지만 yaw가 각도를 의미한다는 것을 알게 되었다.
현재 방향은 , steering으로 변화할 방향은 이다. 또한 원운동에서 즉, 회전을 할 때 차량의 현재 방향은 접선 방향이다.