
2023.11.17 DAY43
대망의 차선인식 경진대회 날이다!!!
원래 목표는 차선 이탈없이 완주하는 것이었다. 하지만 2개의 특정 구간에서 차선이탈이 계쏙 발생했다ㅠㅠ PID로 조절을 해보려고 하였지만 근본적으로 칼만필터에 문제가 있어서 어려웠다. 오늘이 경진대회이기 때문에 일단 2개의 구간보다 전체 주행시 옆의 블록을 최대한 넘어뜨리지 않는 방향으로 목표를 변경하였다!!
🏆 차선인식 경진대회
경진대회 결과!!! 2등을 했다!!!
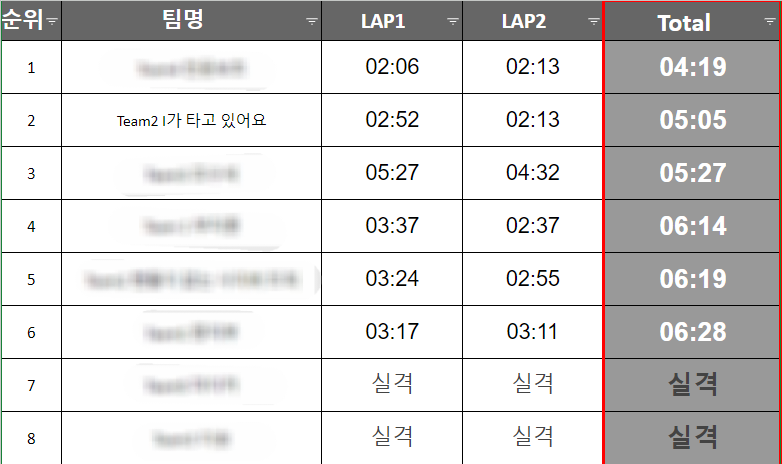
첫번째 주행을 할 때는 속도를 조금 높여 시간을 단축하고자하였는데 그 결과 블록을 너무 많이 쓰러뜨려서 시간 추가가 많이 되었다ㅠㅠ
두번쨰 주행 때는 속도를 느리게하고 블록을 최대한 쓰러뜨리지 않는 방향으로 가니 시간이 훨씬 단축되었다!!
조금 아쉬웠다... 2등을 했다는 것도 그렇지만 차선이탈 없이 최대한 하고 싶었는데 이를 성공하지 못한 부분이 많이 아쉬운 것 같다. 시간이 조금만 더 있었더라면 칼만필터를 제대로 이해하여 예외 부분을 처리하고 더 좋을 결과를 낼 수도 있었을 것 같다. PID 조절도...ㅎㅎ 다음 오프라인 실습 때 일찍가서 못해본 것들을 해봐야겠다!!
PID 조절
- 직진 주행일 때 : PD 제어
- 코너 구간 : PID 제어 (회전할 때 목표값에 더 잘 도달하게 하기 위해 I제어 추가)
경진대회 때 사용한 파라미터 값
LAP 1
- 최대속도 : 18
- 최소 속도 : 7
- PID gain : 0.35 / 0.0007 / 0.08
- down step speed (감속 step): 0.7
- up step spped (가속 step): 0.15
- 결과
- 넘어뜨린 블록 수 : 5
- 재위치 횟수 : 3
- 최종 주행 시간 : 2:52초
LAP 2
- 최대속도 : 15
- 최소 속도 : 7
- PID gain : 0.35 / 0.0007 / 0.08
- down step speed (감속 step): 0.4
- up step spped (가속 step): 0.15
- 결과
- 넘어뜨린 블록 수 : 1
- 재위치 횟수 : 2
- 최종 주행 시간 : 2:13초
