K-d 트리는 K-dimensional tree로 K 차원 공간에서 데이터를 partitioning 하는 기법.
- 모든 노드가 K차원 데이터를 가짐.
- non-leaf 노드는 공간을 반으로 나누는 hyperplane을 생성.
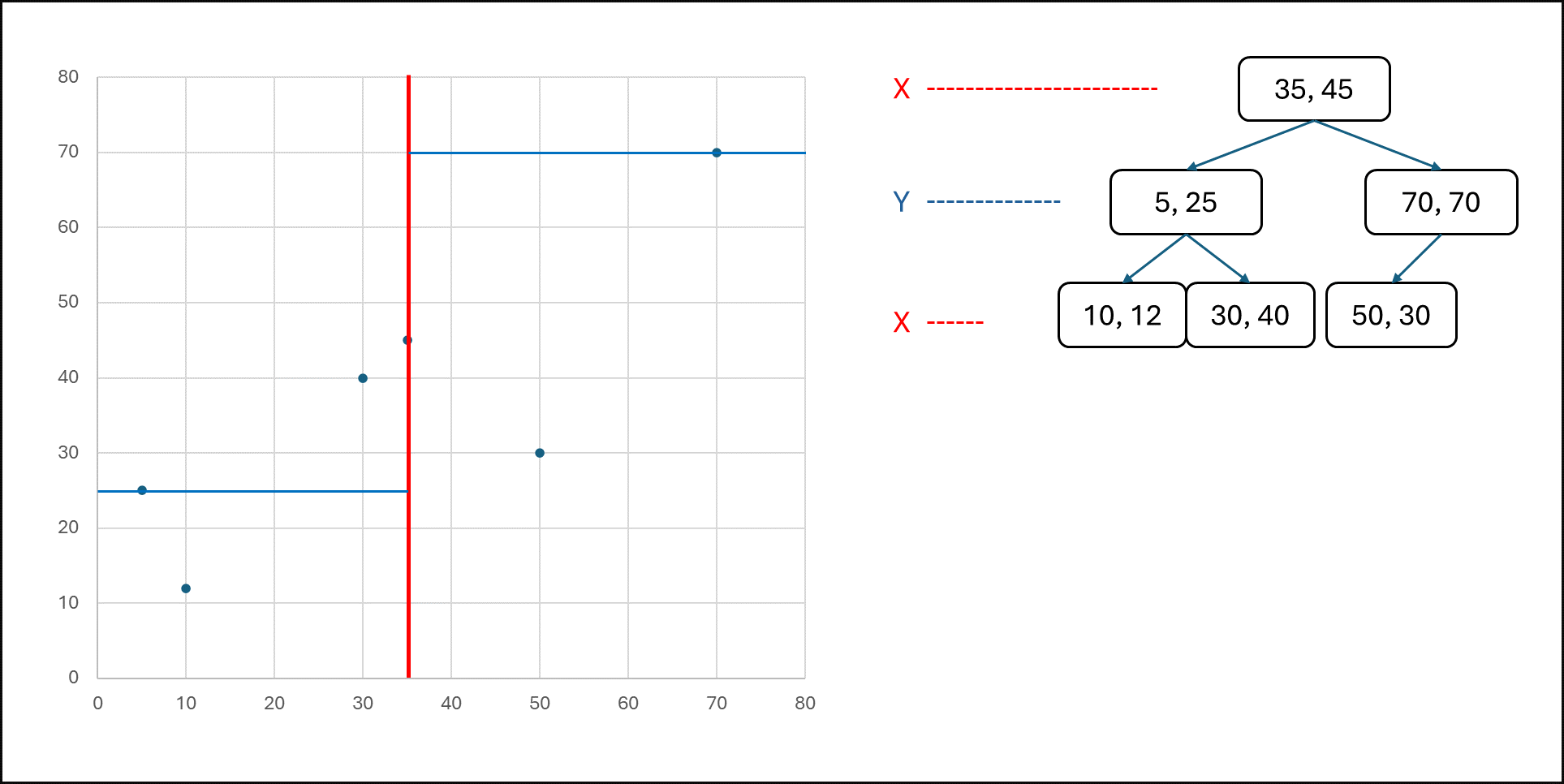
- 트리 아래로 내려가면서 차원을 순환. (ex. 2차원 데이터가 있을 때, root node가 x축을 기준으로 나눈다면, 그 다음 노드들은 y축을 기준으로 나누고, 그 다음 노드들은 다시 x축을 기준으로 나눔)
Algorithm
function kdtree (list of points pointList, int depth)
{
// Select axis based on depth so that axis cycles through all valid values
var int axis := depth mod k;
// Sort point list and choose median as pivot element
select median by axis from pointList;
// Create node and construct subtree
node.location := median;
node.leftChild := kdtree(points in pointList before median, depth+1);
node.rightChild := kdtree(points in pointList after median, depth+1);
return node;
}from wiki
데이터가 이렇게 존재 한다면 아래와 같은 트리가 만들어진다.
Nearest Neighbor Search
K-d 트리로 부터 주어진 포인트와 가장 가까운 것을 찾아낼 수 있다.
1. root-node부터 recursive하게 아래로 내려간다.
2. leaf-node의 포인트와 주어진 포인트 사이의 거리를 계산하고 "current best"로 저장.
3. tree를 다시 거슬러 올라가며, 거리를 계산하고 current best를 업데이트한다.
* 다른 plane에 더 가까운 포인트가 있을 수 있다. 그 점을 고려. 
영상처리와 AI에 관심이 있는 학생입니다.