IPM(Inverse Perspective Mapping)
- 카메라 이미지 pixels의 모든 depth가 0이라고 가정
- 위 가정을 바탕으로
카메라 이미지 pixels->world xyz coordinates - 방법론
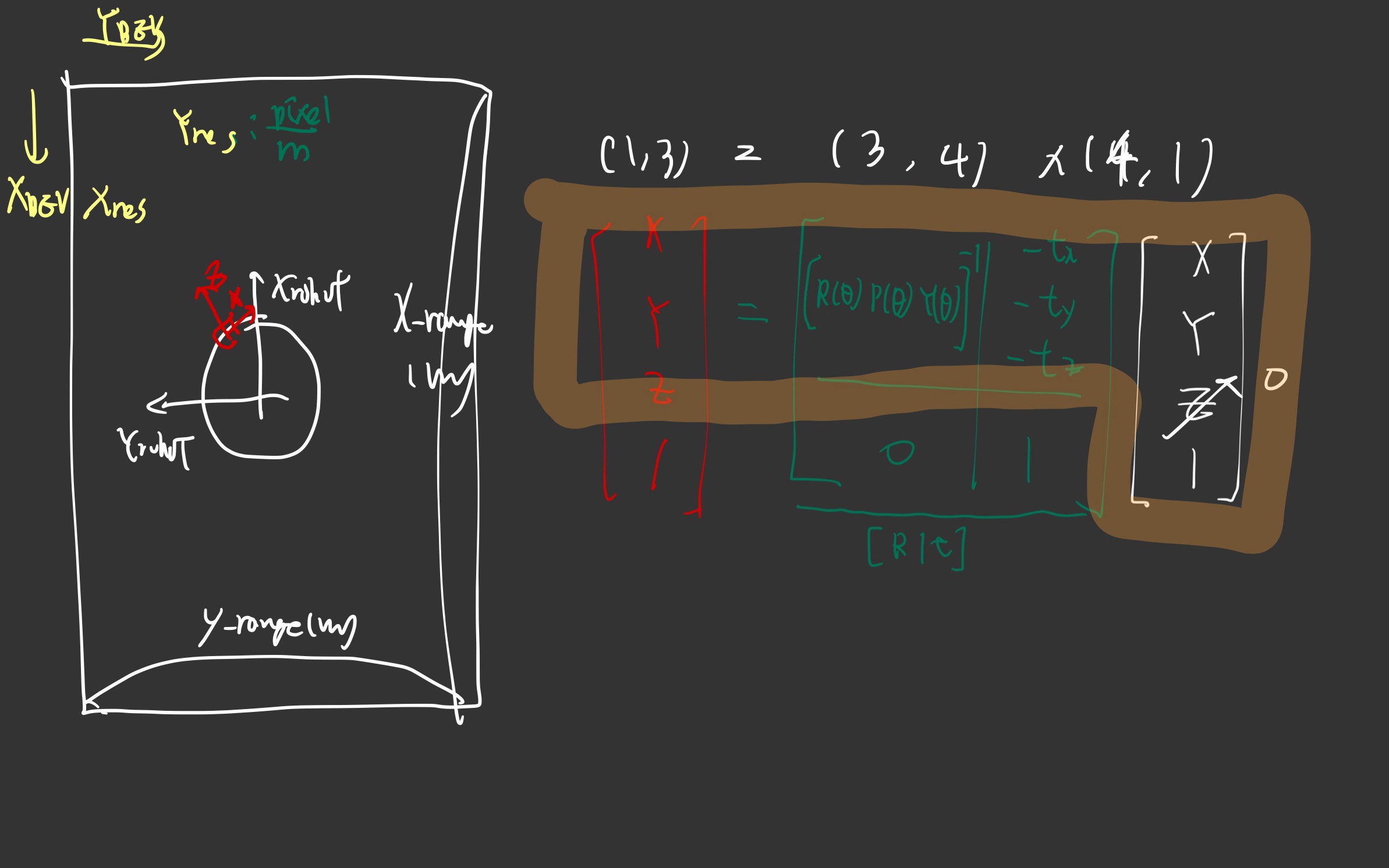
- BEV map 픽셀 → 카메라 이미지 픽셀 하는 matrix를 구한 뒤 inverse 취해주는 방식
- 두괄식 결론: 아래 M 행렬 구하는게 목적
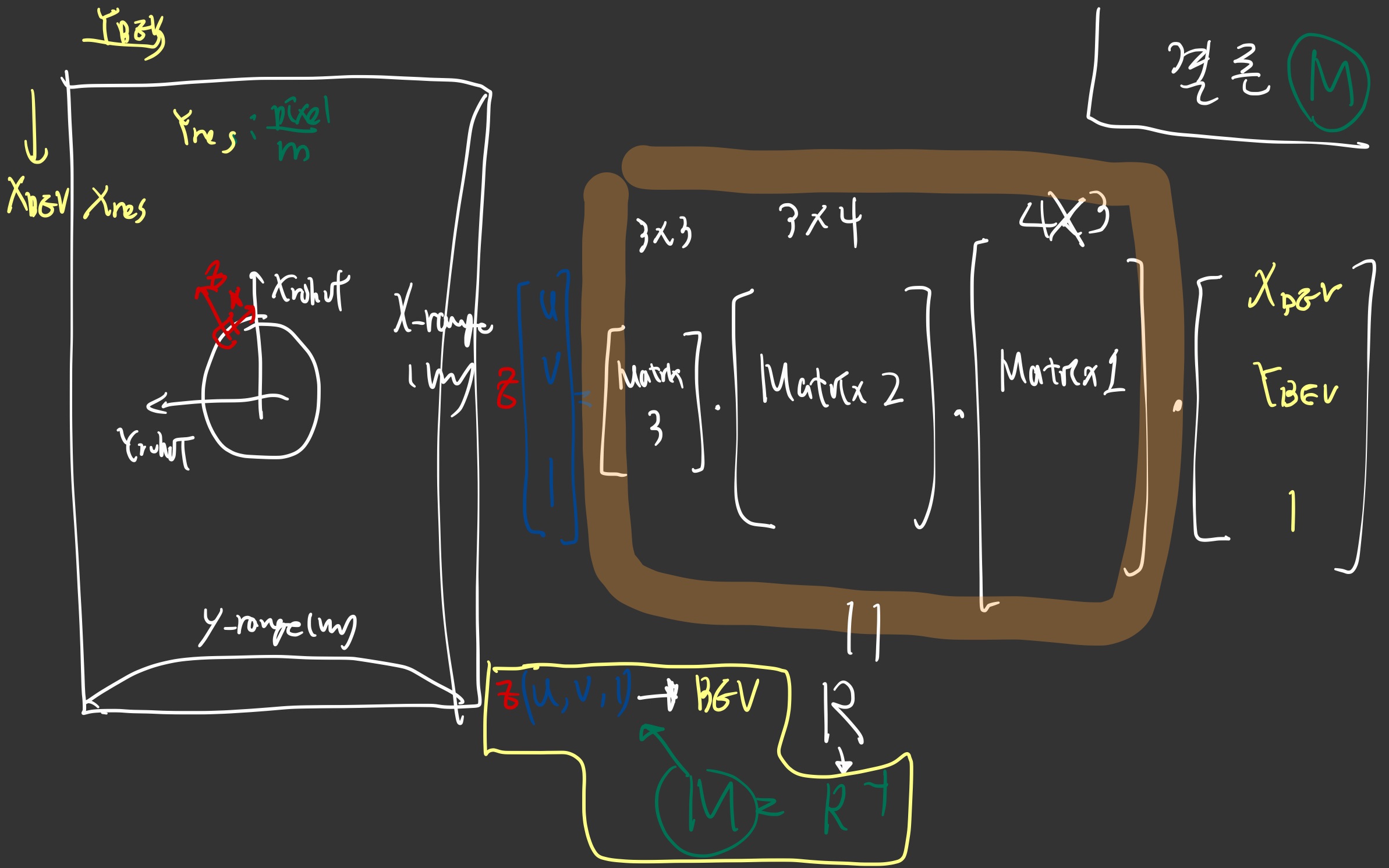
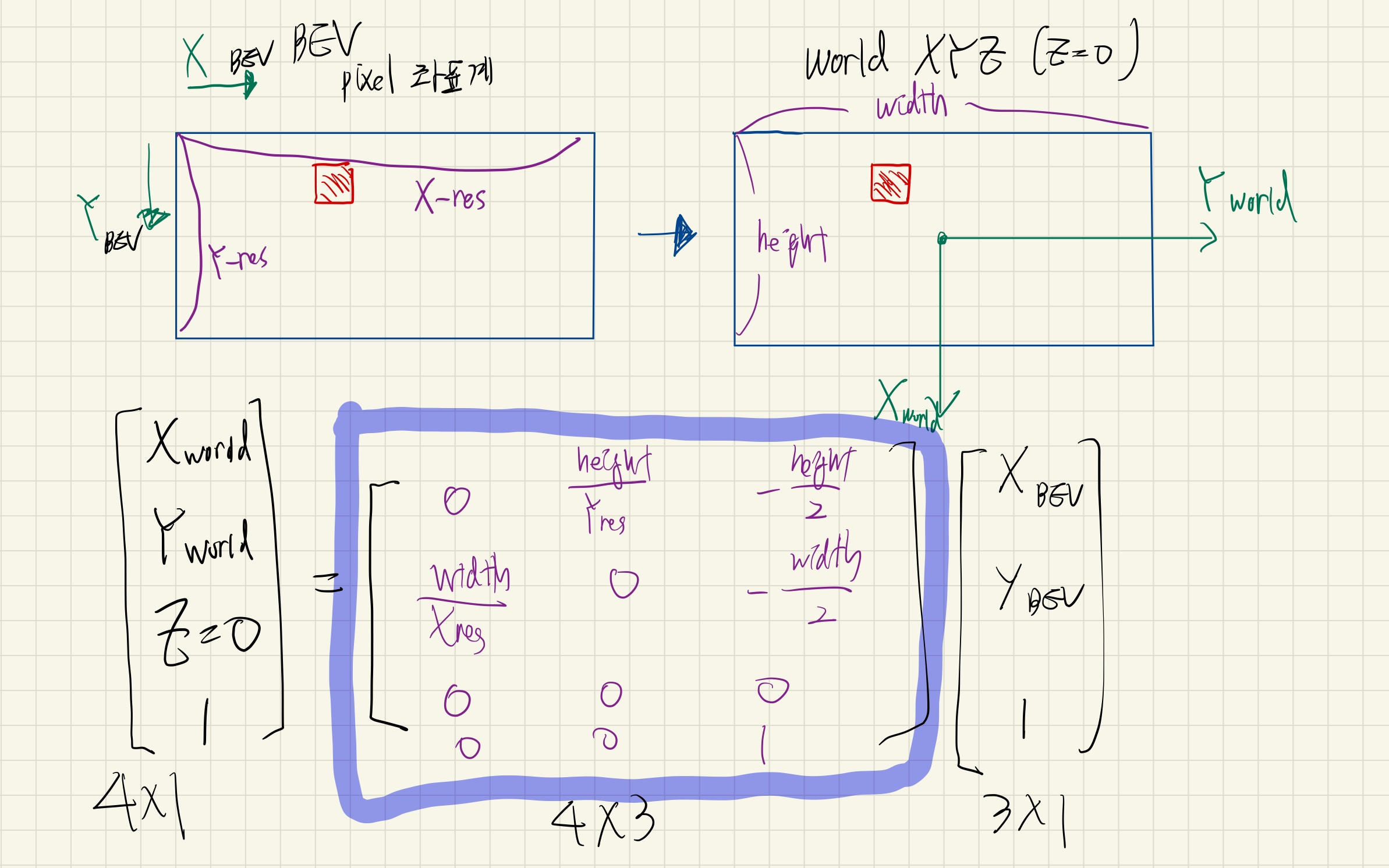
- Matrix_1(BEV map pixel 좌표계 → world xyz 좌표계(z=0) )
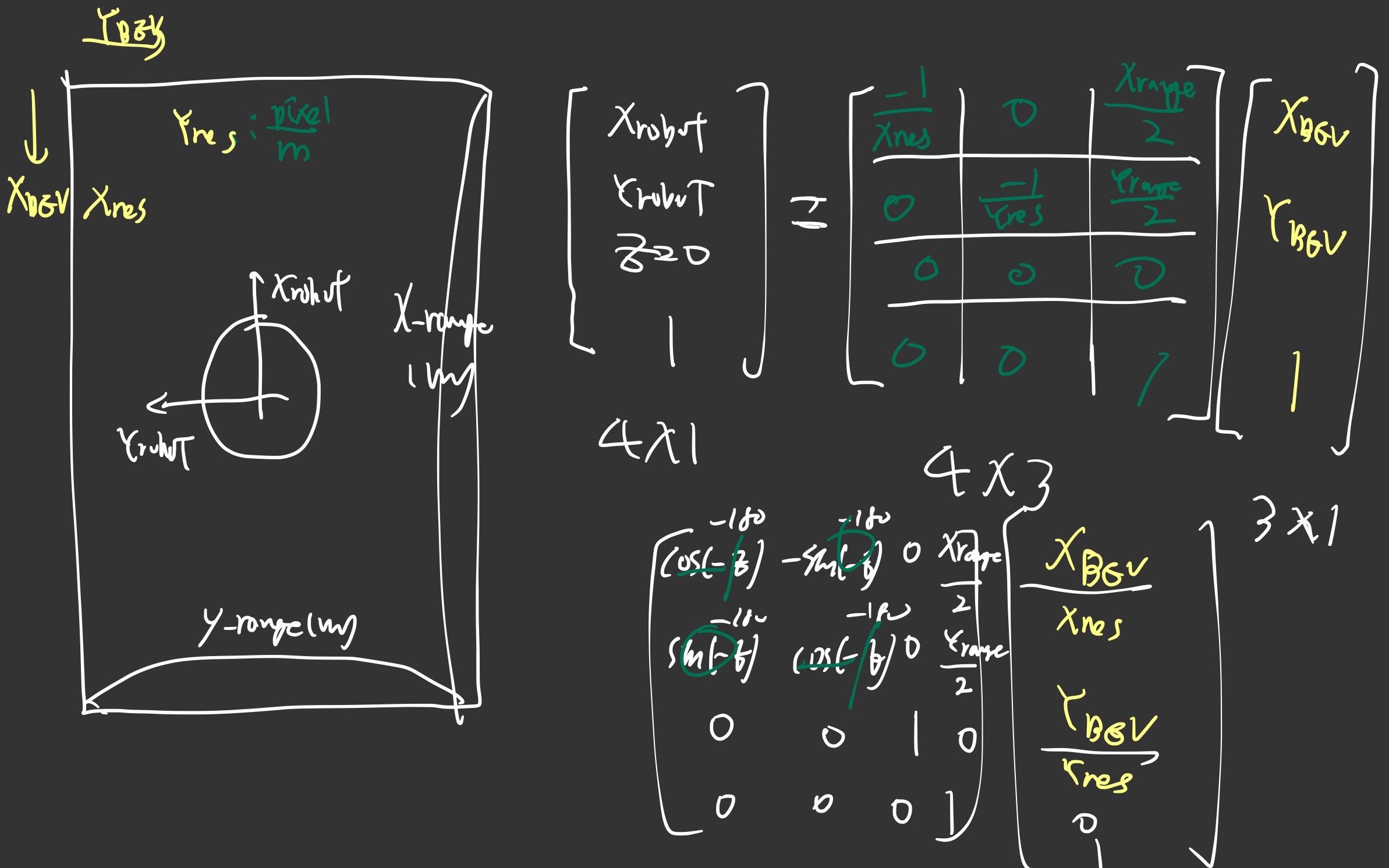
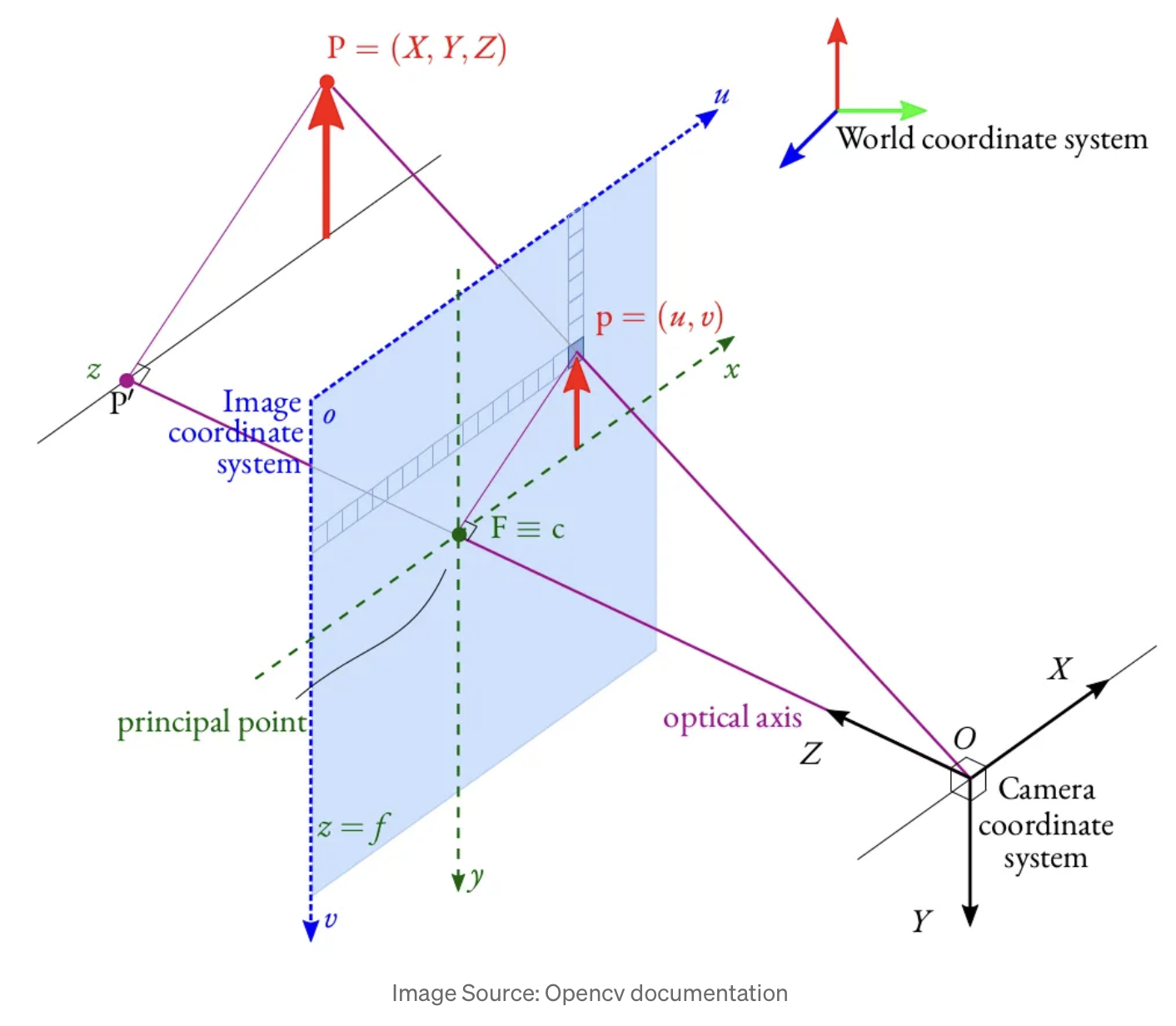
- Matrix_2(world xyz좌표계 → 카메라 xyz 좌표계 변환)
- Extrinsic Matrix
- 아래 그림은, 우리가 목표하는 변환의 시각화
- 밑 행렬은, 회전변환(
3*3 matrix 3개)과병진변환 행렬(3*4)에 대한 소개 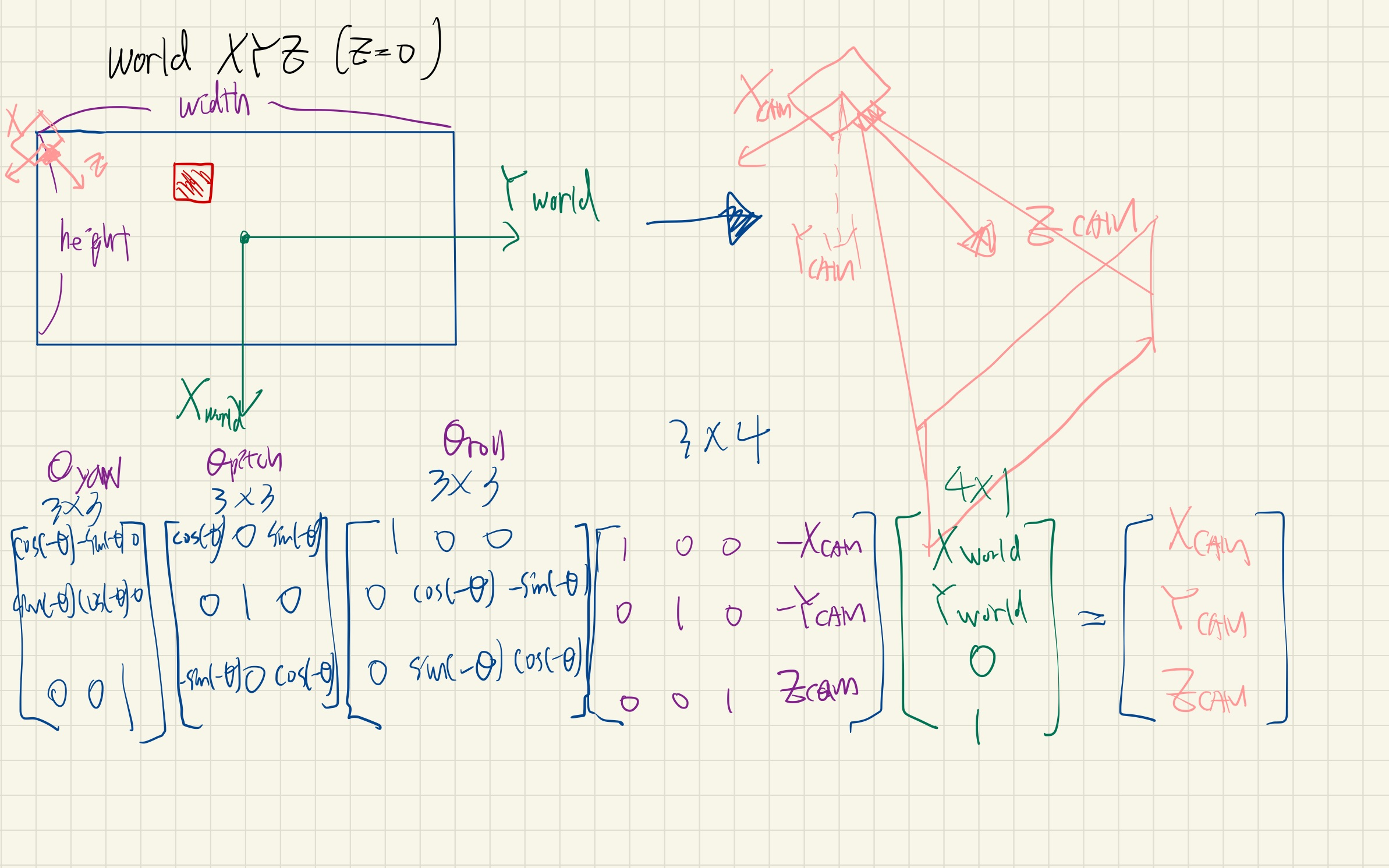
- 나는 1번에 변환하지 않고, 아래의 2 step으로 진행했음
- world xyz -> 카메라 정육면체 xyz 좌표계
- 카메라 정육면체 xyz 좌표계 -> 카메라 렌즈 xyz 좌표계
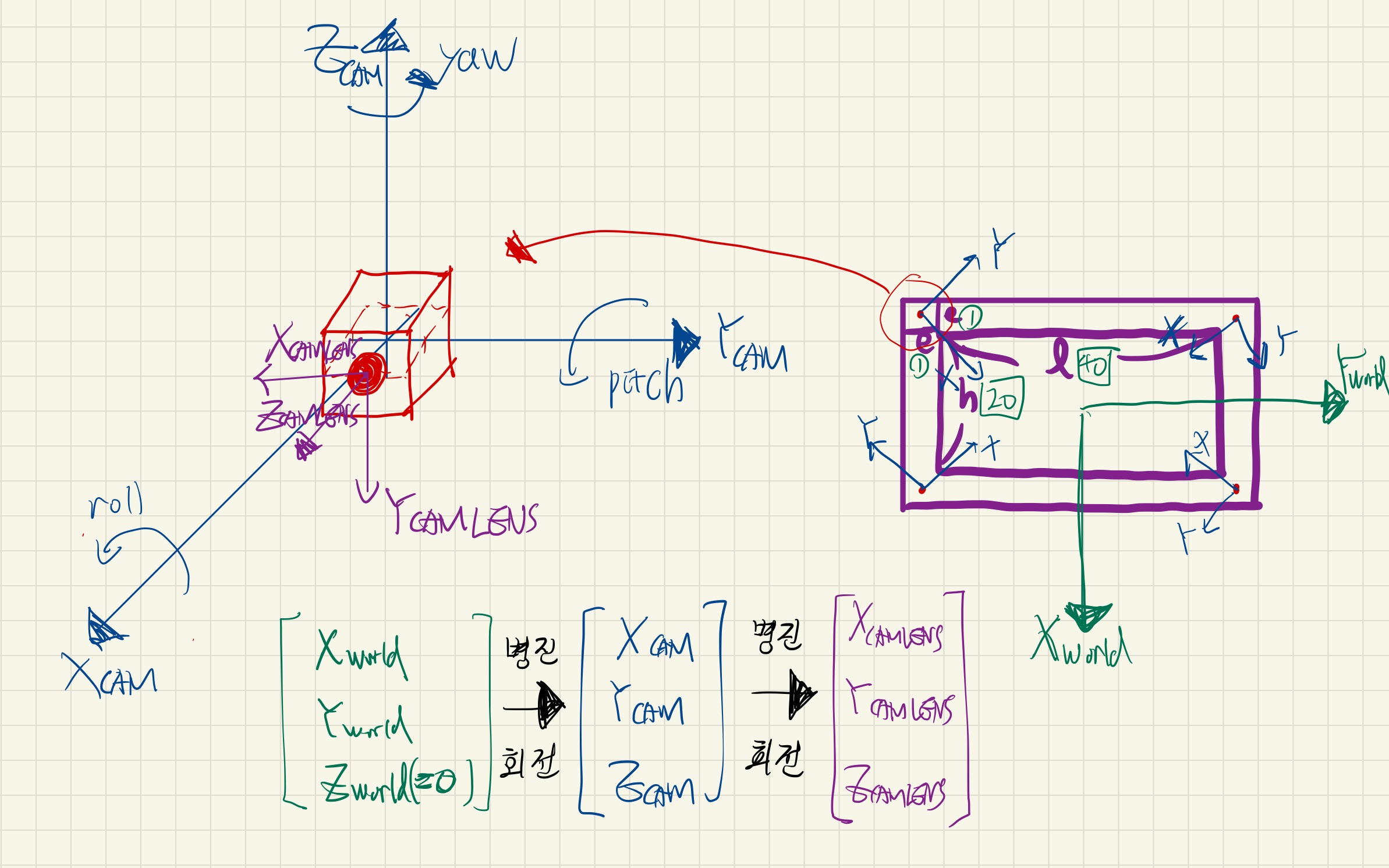
- Extrinsic Matrix
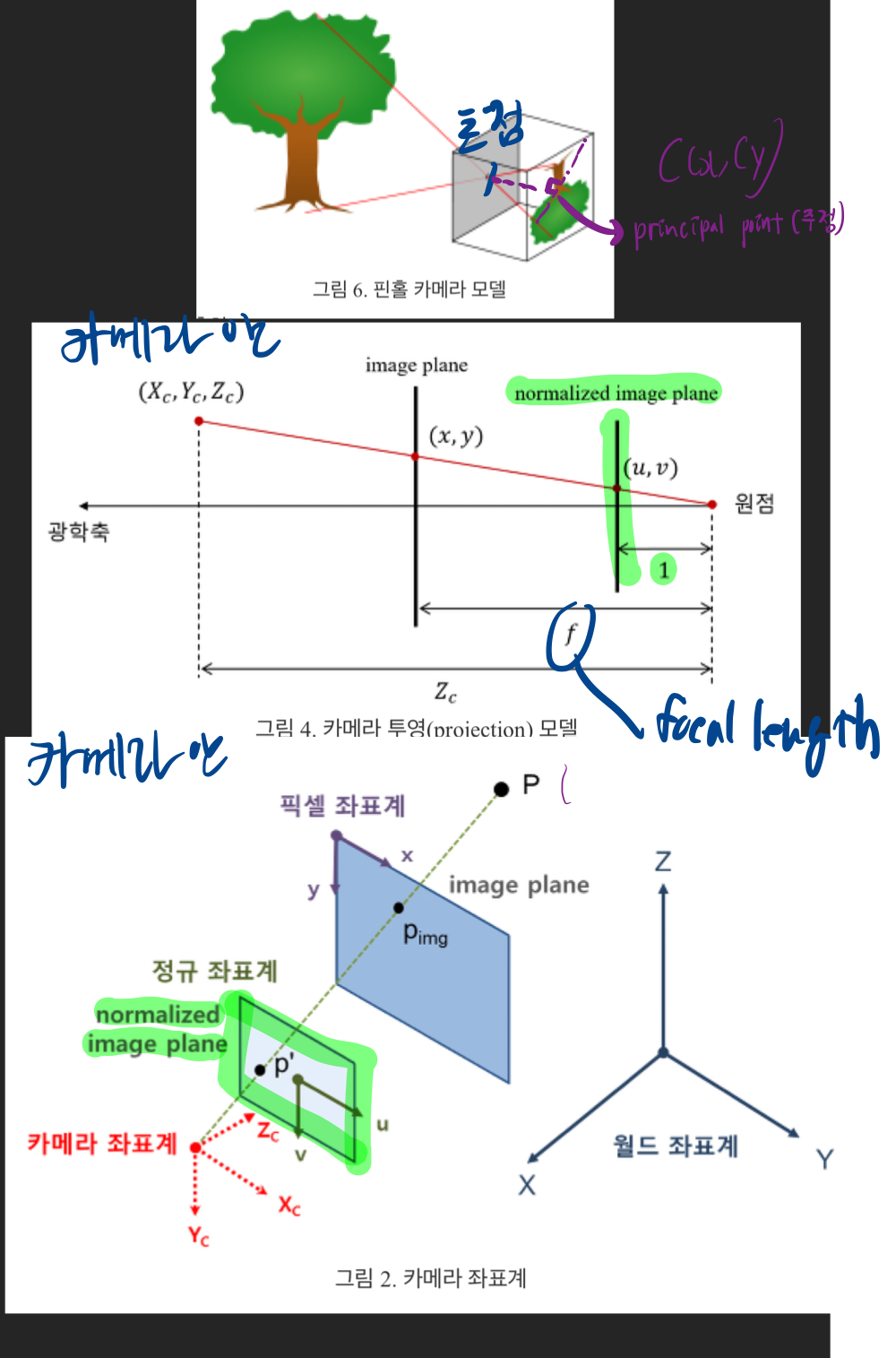
- Matrix_3(카메라 xyz 좌표계 → 카메라 pixel 좌표계)
- intrinsic matrix
- intrinsic matrix
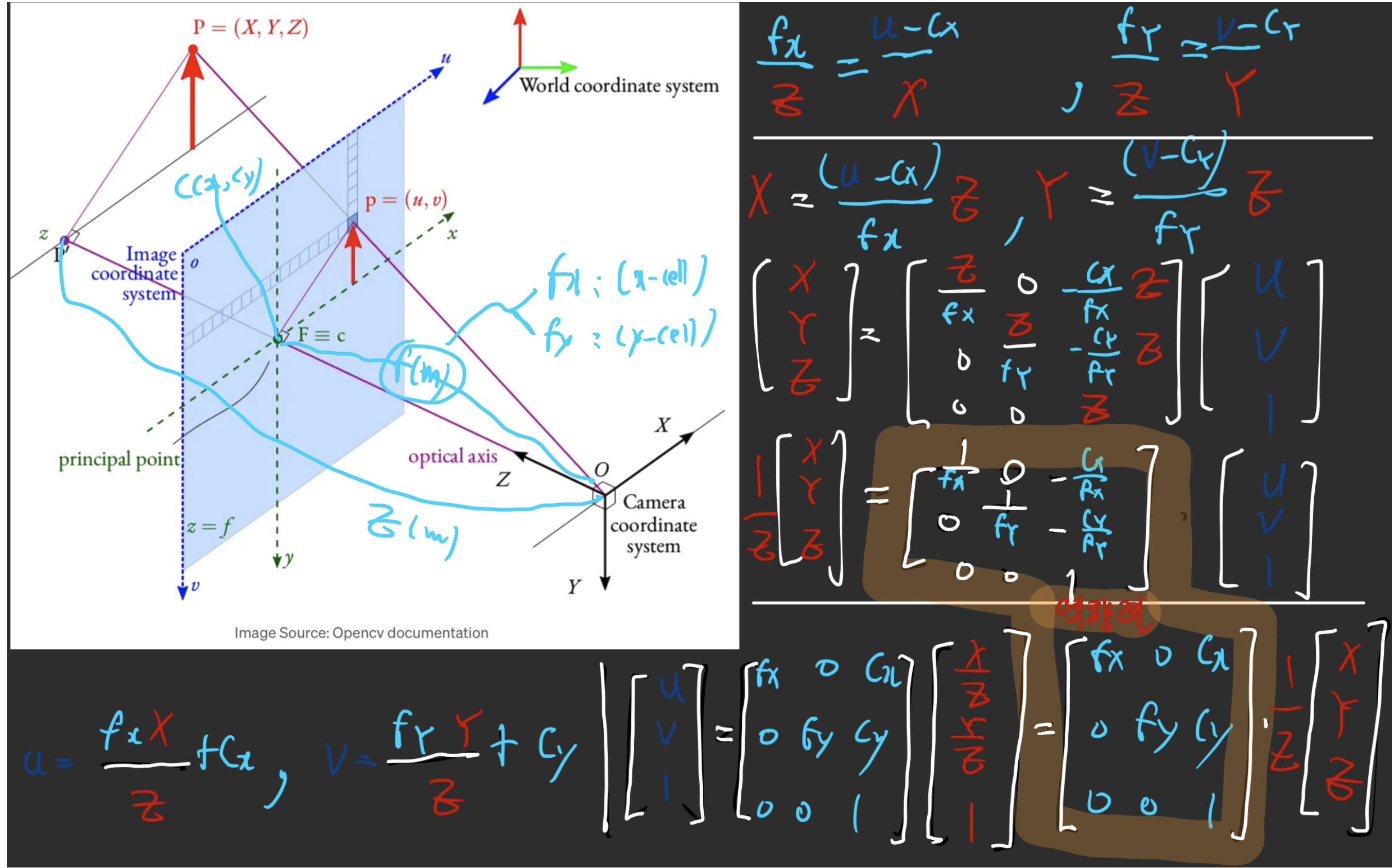
- 요약
- BEV map 픽셀 → 카메라 이미지 픽셀:
Matrix 3 * Matrix 2 * Matrix 1- Matrix 1: BEV pixel map → world XYZ
- Matrix 2: world XYZ → Camera XYZ (Extrinsic)
- Matrix 3: Camera XYZ → Camera pixel map (Intrinsic)
- BEV map 픽셀 → 카메라 이미지 픽셀:
- 카메라 이미지 픽셀 → BEV map 픽셀 :
Inv(Matrix 3 * Matrix 2 * Matrix 1)
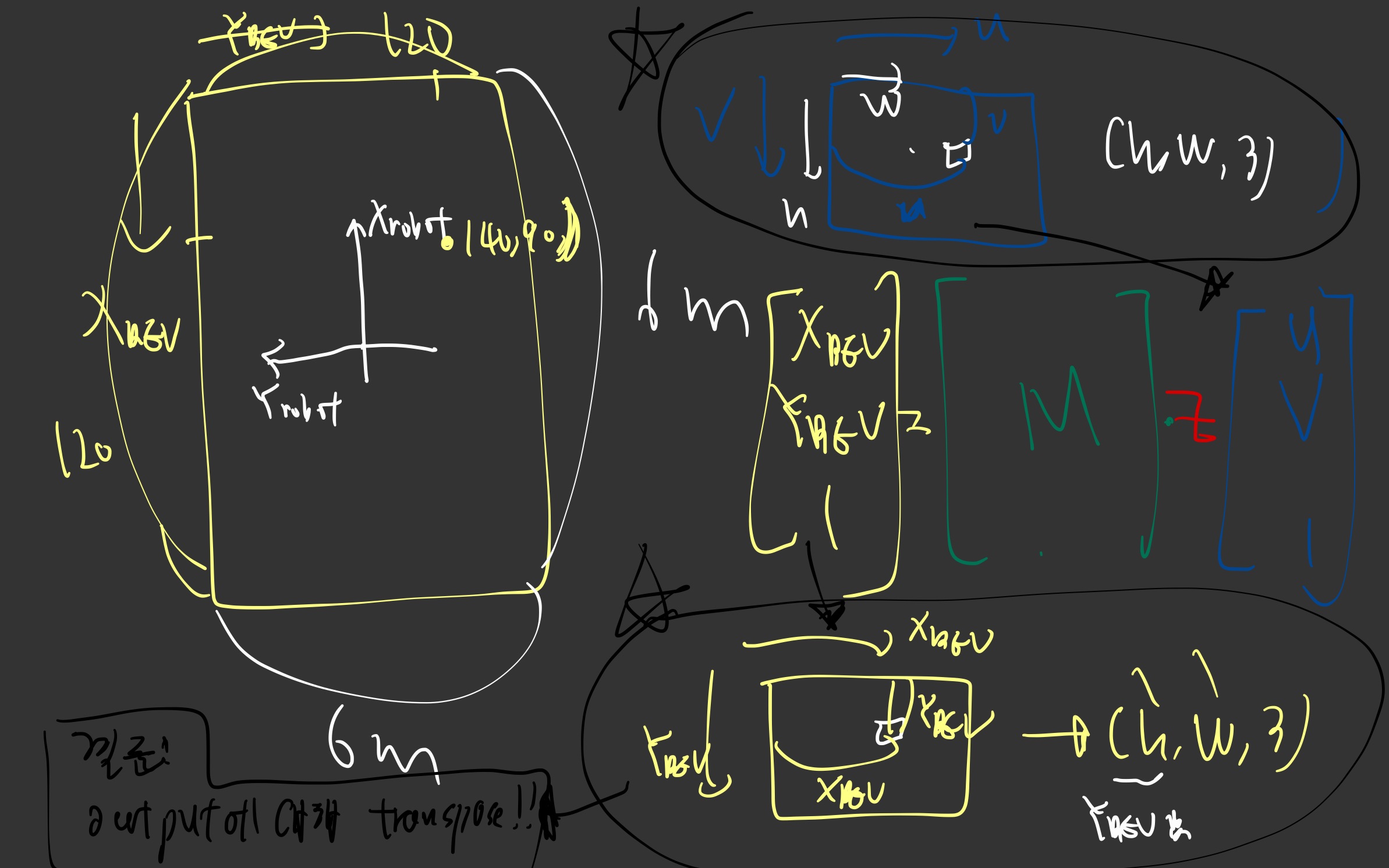
NOTES
- cv2.warpPerspective를 쓸 때, src로 (h, w,3)을 넣음
- h, w는 각각 v, u 축이나,
- 우리의 M matrix는 u, v 순서임

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것