Action Spotting using Dense Detection Anchors Revisited: Submission to the SoccerNet Challenge 2022
action recognition in videos
목록 보기
5/24
abstract
-
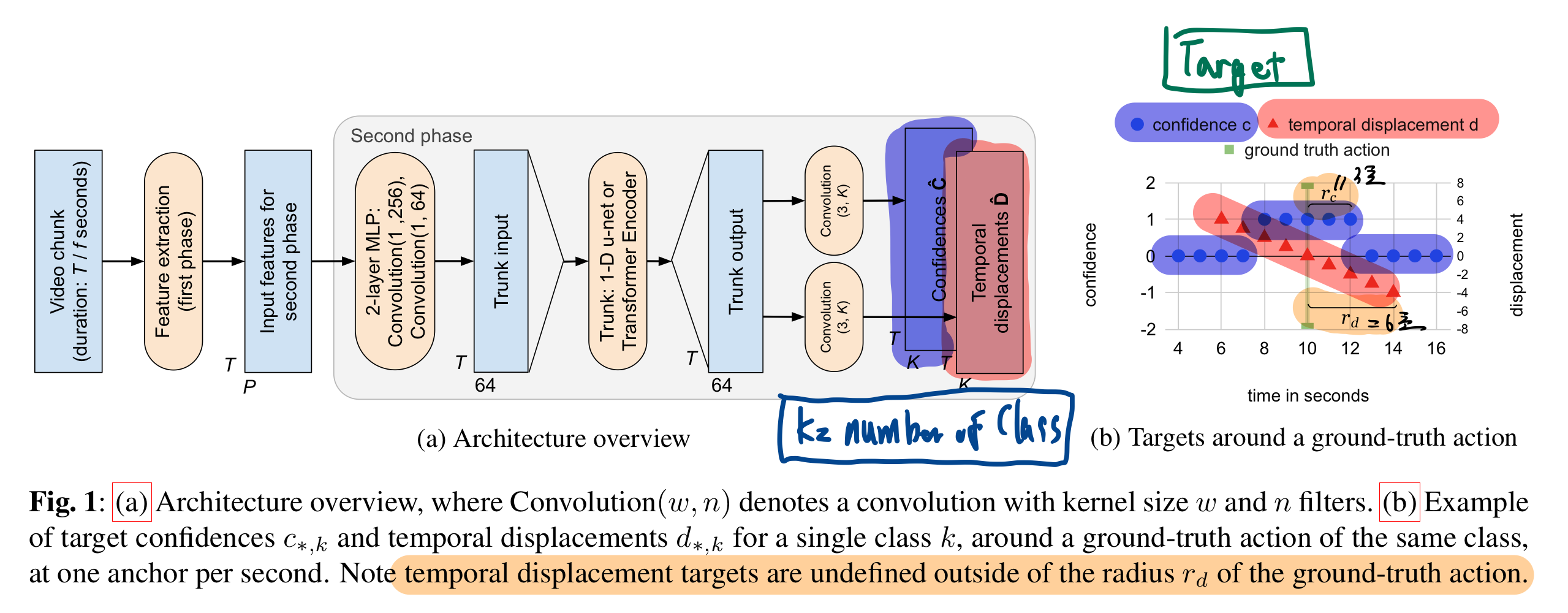
밀집된 탐지 앵커(densely sampled detection anchors)사용- 각 앵커는
특정 시간과 행동 클래스의 쌍으로 정의됨 (60초 영상이면,60 * 2hz * 3 class = 360 개앵커)- 1 input feature vector 당, 1 class 당, 1개의 앵커
- 여기서 앵거는
- 위 그림의 파란색 빨간색 박스를 의미
- 아래 그림 왼쪽 아래의 3개의 막대바를 의미 (
탐지 신뢰도만 그렸음)
- 각 앵커에 대해,
탐지 신뢰도+시간적 변위가 추론됨
- 각 앵커는
-
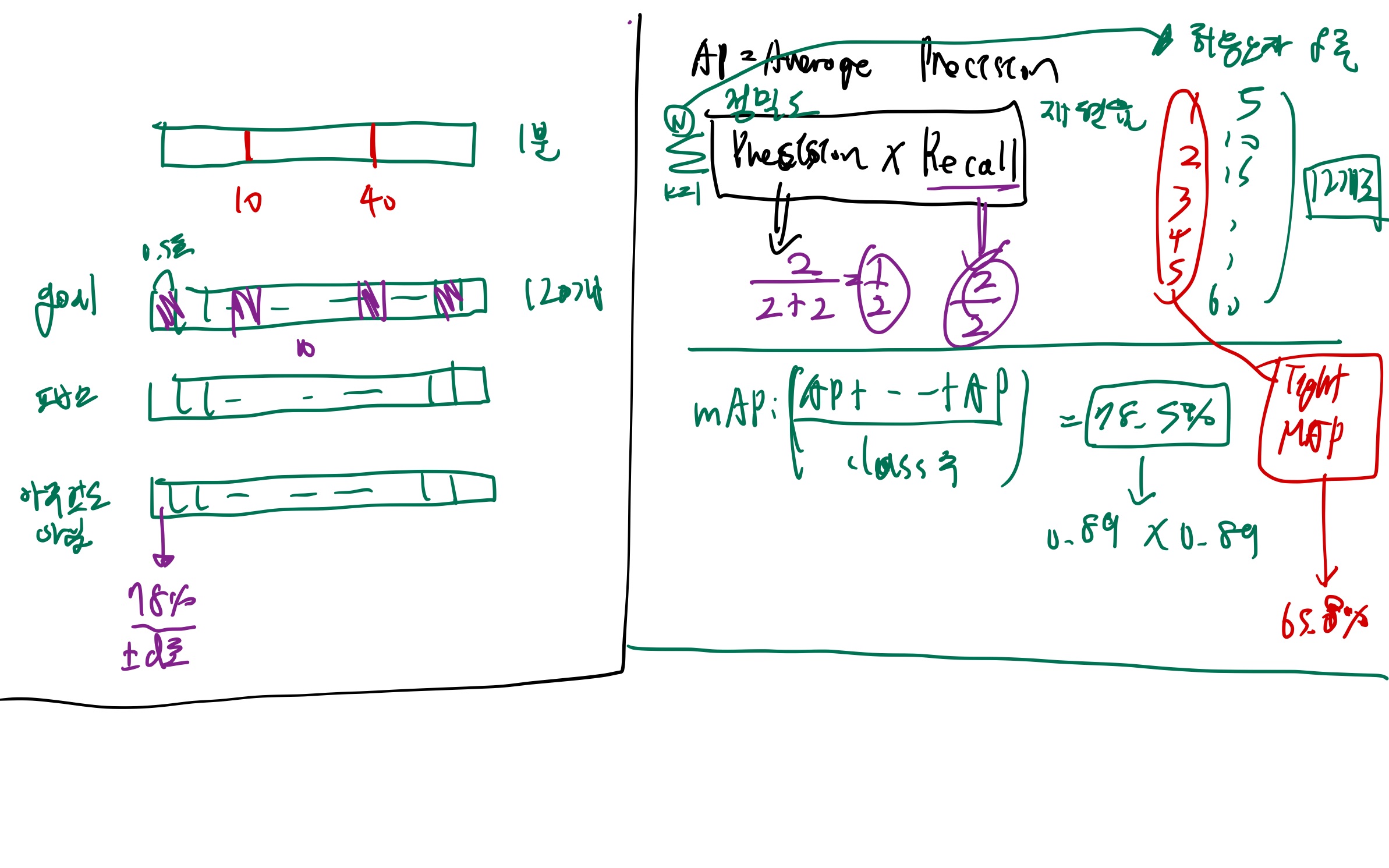
'타이트 평균-mAP(tight average-mAP)' 성능 지표에서 상당한 개선 (아래 빨간글씨)
-
프로세스의 개선:
사전 처리(pre-processing) 및 사후 처리(post-processing) 단계에 작은 변화- 또한,
다양한 유형의 입력 기능을 '늦은 융합(late fusion)'을 통해 결합
1. Introduction
1.1. TEMPORALLY PRECISE ACTION SPOTTING IN SOCCER VIDEOS USING DENSE DETECTION ANCHORS
- 이 논문을 발전시켰음
- https://velog.io/@hsbc/TEMPORALLY-PRECISE-ACTION-SPOTTING-IN-SOCCER-VIDEOS-USING-DENSE-DETECTION-ANCHORS
1.2. introduction
- 이전 논문에서 사용한 2개의 feature을 late fusion함
- "RESNet-152 + PCA" features : 2 fps
- "Combination": 1 fps
- 1 fps 를, linear interpolation을 통해 2fps로 변환
- 이유: 빈도(1fps)가 허용 반경이 0.5초 단위로 증가하는 타이트 평균-mAP 지표를 적절하게 계산하기에는 너무 낮다는 것을 알아냄
- 최종 탐지를 얻기 위해
non-maximum suppression, NMS단계가 적용
2. Features
2.1. Experimental protocol and model training
- SoccerNet 데이터셋에는 '훈련', '검증', '테스트', '챌린지'라는 네 가지 분할
- 세 가지 프로토콜:
- test
- training: '훈련'
- validation: '검증'
- test: '테스트'
- 챌린지 검증
- training: '훈련' + '테스트'
- validation: '검증'
- test: '챌린지'
- 챌린지
- training: '훈련', '검증', '테스트'
- validation: X
- test: '챌린지'
- 각 모델에 대한 학습률, Sharpness-Aware Minimization(SAM), 가중치 감소, mixup 데이터 증강 등의 하이퍼파라미터들은
검증 세트를 사용하여 조정
Soft non-maximum suppression

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것