Introduction
-
ADAS: Advanced Driving Assistance SystemLDWS: Lane Departure Warning System ➡️ 소리 경고LKAS: Lane Keeping Assistant System
-
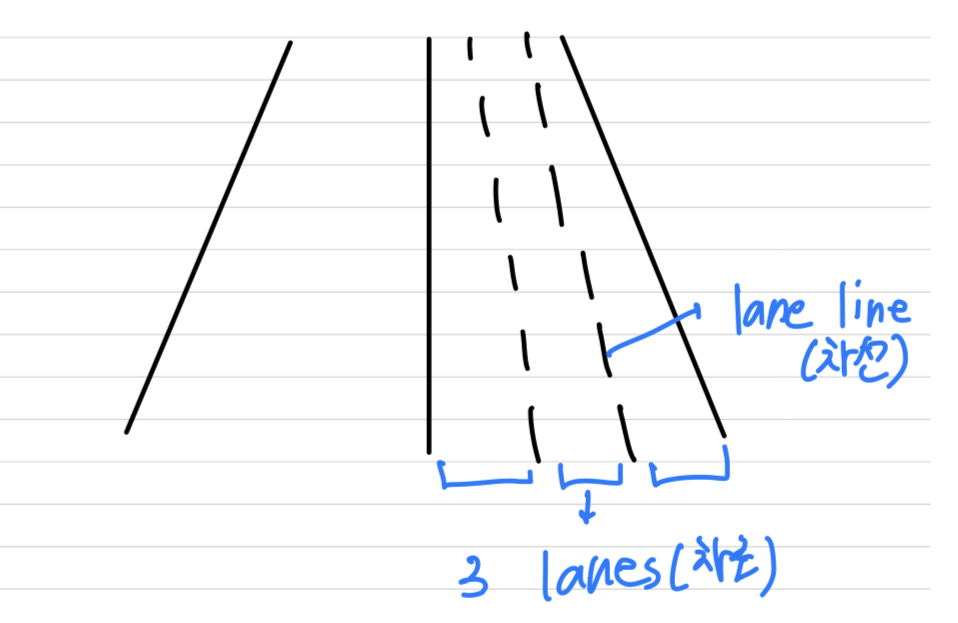
Road,lane,lane line
-
There are many
waysto detectlane linesusing vision systems.Canny Edge DetectionHough Transform Algorithm
Lane Detection
-
FSC(Forward Sensing Camera)- A typical lane detection uses a forward sensing camera.
- Lane lines and the ground can be distinguished by color difference.
- Lane can be detected by segment detection from the edge image.
-
Vanishing Poing: There is a horizontal line...- horizontal line 위의 부분은 lane line와 상관없는 image 영역.
- horizontal line 아래 부분은 lane line이 있는 image 영역
➡️ 따라서 ROI(Region On Interest)만 보기 위해 image를 horizontal line을 기준으로 Cropping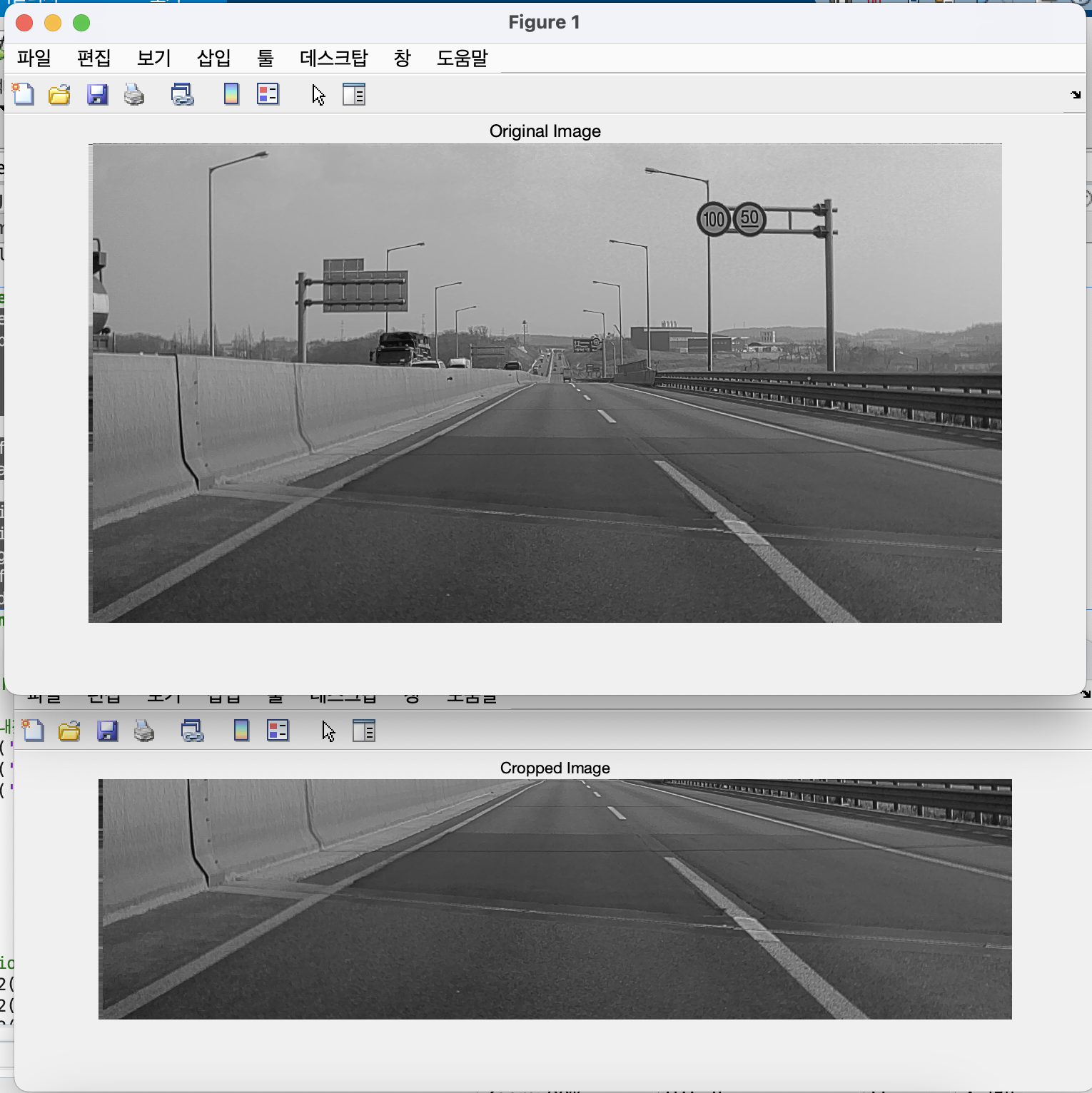
Canny Edge Detection
- Edge Detector requires the following three criteria
- Low error rate of detection
- Localization of the edge points
- Single response
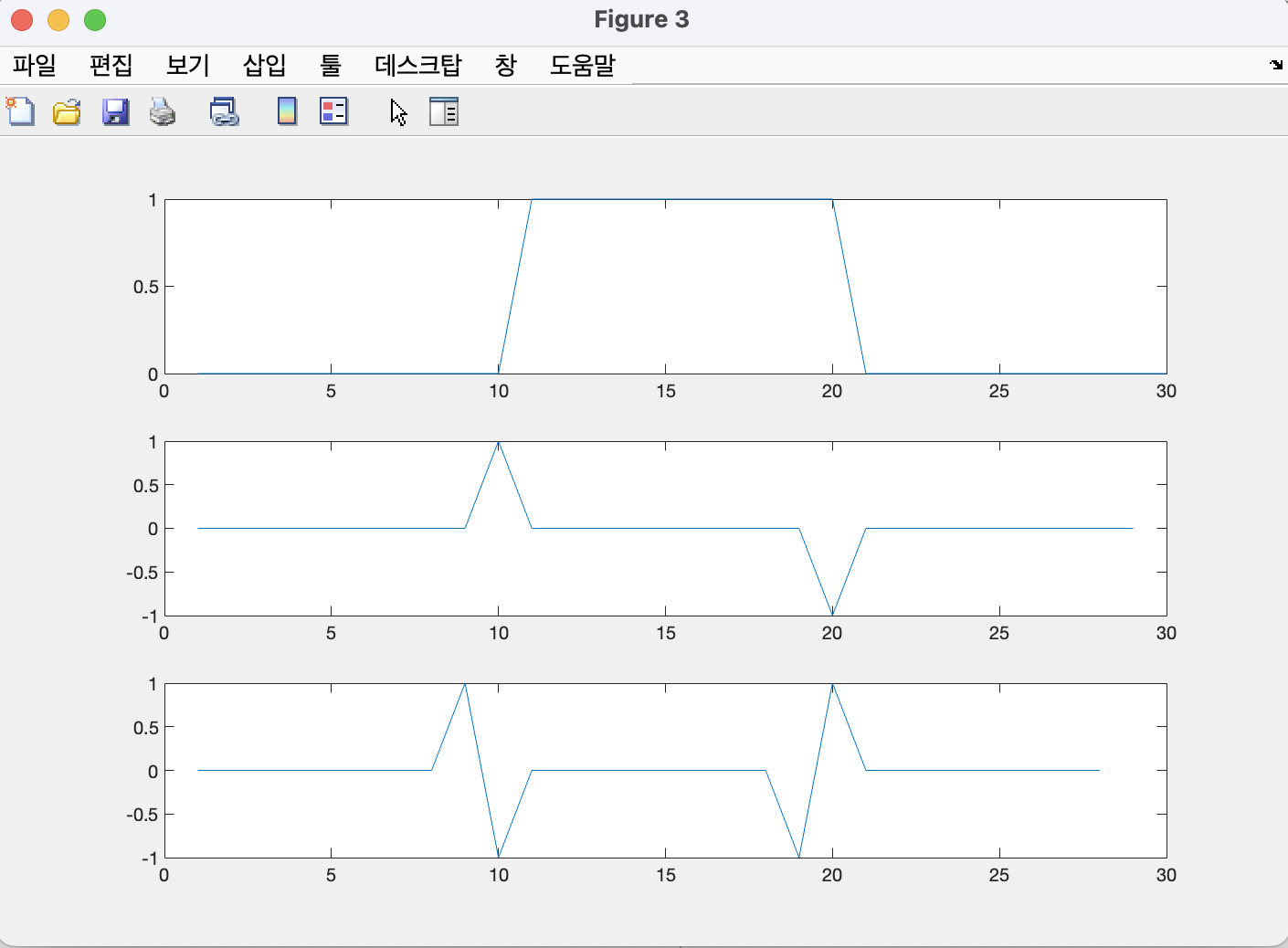
Edge Detection by derivative operations
- Lane Line Detection by derivative operations
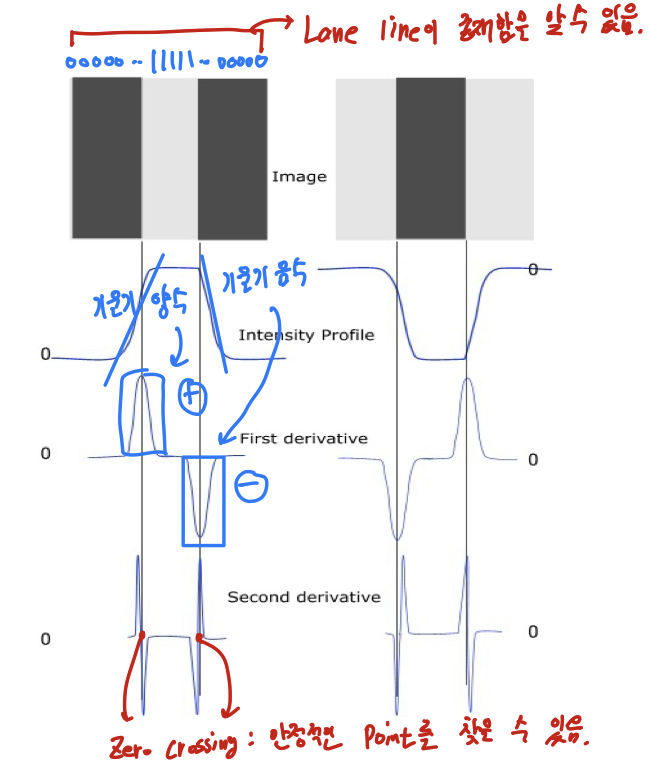
- 두 번
차분하여Zero Crossing Point를 찾을 수 있기 때문에
Lane Line의 흰 색이 언제 시작되었고, 언제 끝났는지에 대한 정보를 얻을 수 있다.
➡️ Edge line을 detection 가능
- 두 번
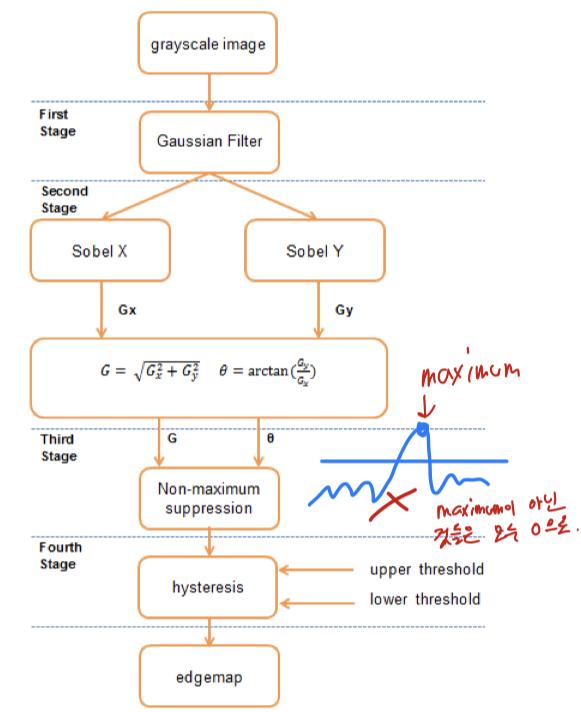
Process
- The Canny Edge Detection Algorithm consists of the following stages
gray scale image
- 우리의 목적은 Lane Line Detection이기 때문에
Edge의 Color image를 사용할 필요가 없다.

Gaussian Filter
-
정규분포: Gaussian Distribution. (mu=?, sigma=?) -
표준정규분포: Normalized Gaussian Distribution. (mu=0, sigma=1)
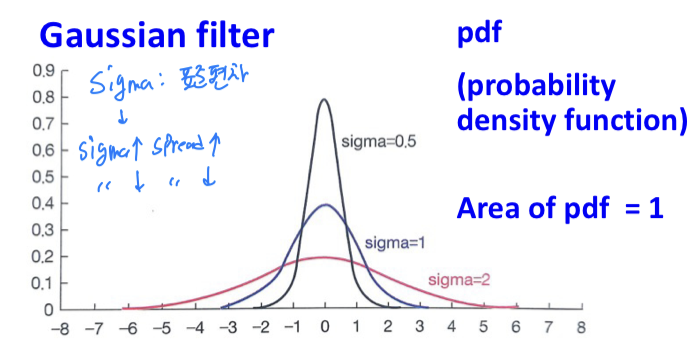
- sigma가 크면, spread 정도 큼.
- sigma가 작으면, spread 정도 작음.
-
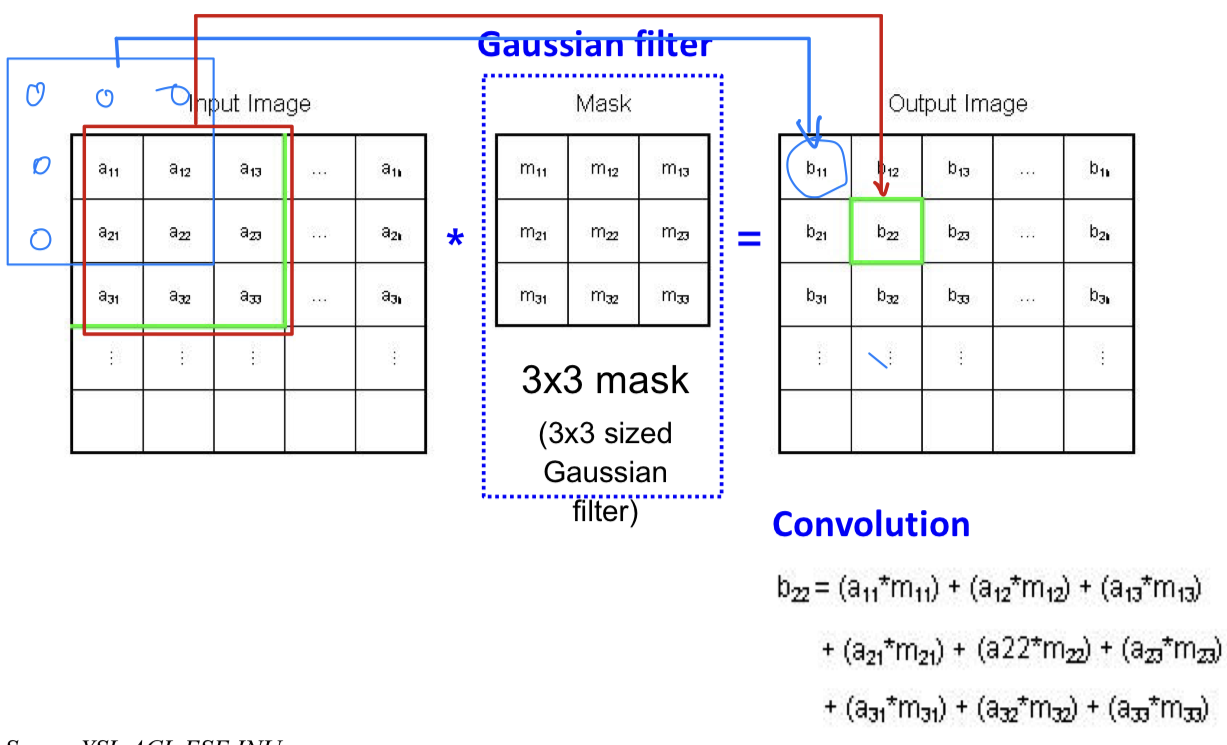
Image에 Gaussian Filter를 왜 씌우는가?
➡️ filter를 통해 주변에 있는 8개의 information을 축소, 가운데 있는 대표값을 최대화하기 위해서
- sigma=5, size=[5 x 5]인 filter
g1➡️ symmetric matrix가 만들어짐을 확인할 수 있다. g1을 input image와 convolution 연산하여
가운데에 있는 data를 크게, 주변 8개의 data를 작게 하여 가운데 data를 대표값으로 끄집어낸다.
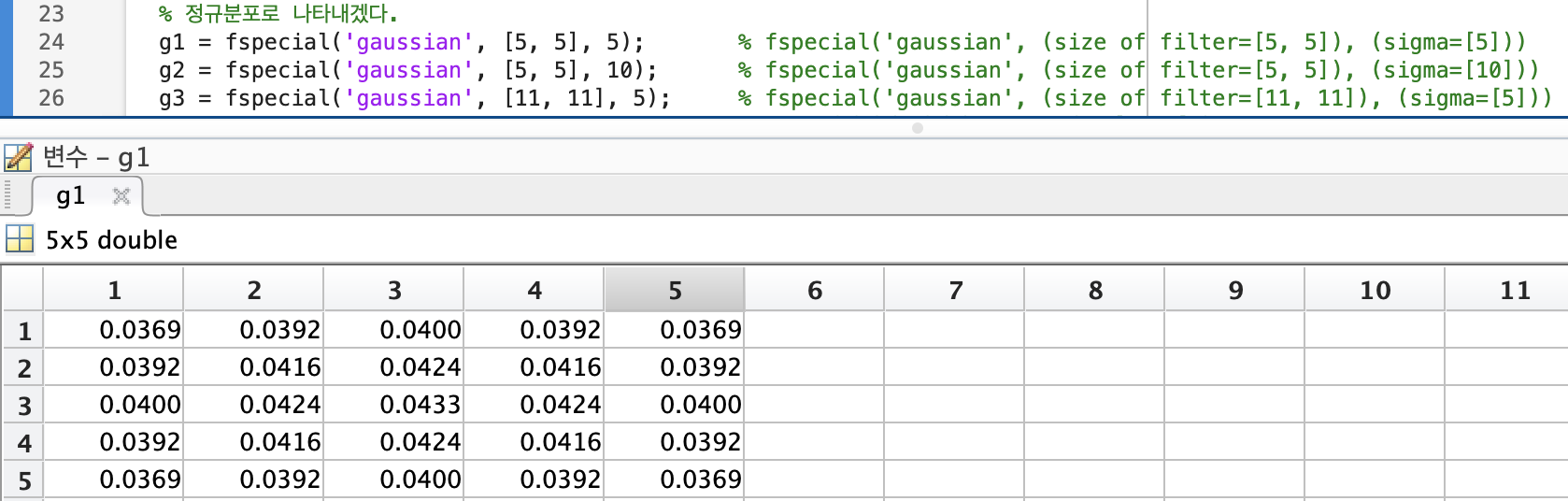
- sigma=5, size=[5 x 5]인 filter
-
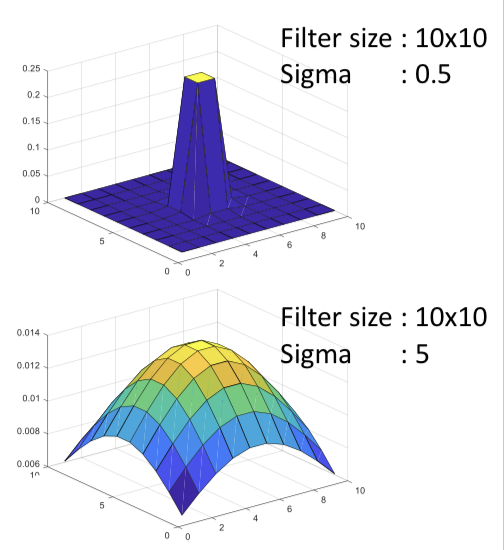
Gaussian Filter Test- Case 1 : fspecial('gaussian', (size of filter=[5, 5]), (sigma=[5]))

- Case 2 : fspecial('gaussian', (size of filter=[5, 5]), (sigma=[10]))

- Case 3 : fspecial('gaussian', (size of filter=[11, 11]), (sigma=[5]))

➡️ sigma값이 클수록, blurring(흐릿한) 현상이 커지는 것을 확인
- Case 1 : fspecial('gaussian', (size of filter=[5, 5]), (sigma=[5]))
Sobel Operator
-
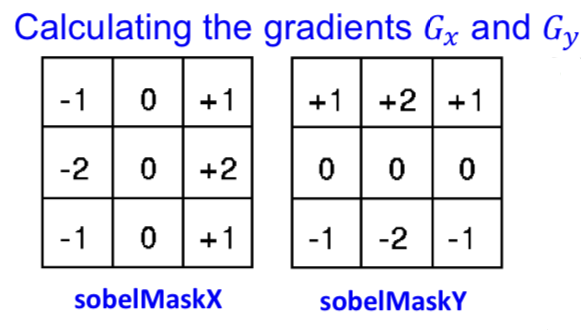
Calculating the gradients and
- 모든 방향의 edge 추출
- noise에 강함
- 수직, 수평 edge보다 대각선 방향 edge에 더 민감.
- mask size는 다양하게 가능 (3x3, 5x5, 7x7)
-
Sobel Mask X == 수직 방향 Edge 검출
Sobel Mask Y == 수평 방향 Edge 검출
-
Example
%% 2_1. Calculating gradient with sobel mask
sobelMaskX = [-1, 0, 1; -2, 0, 2; -1, 0, 1]; % 수평 방향(x) 미분 filter -> 수직 방향 edge 검출
sobelMaskY = [1, 2, 1; 0, 0, 0; -1, -2, -1]; % 수직 방향(y) 미분 filter -> 수평 방향 edge 검출
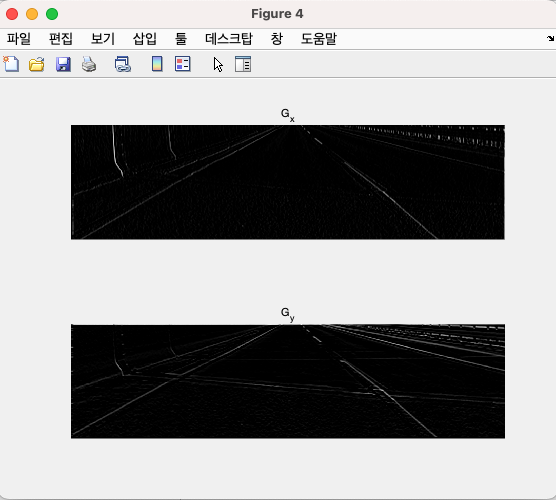
% Convolution with horizontal and vertical filter
G_X = conv2(img1, sobelMaskX, 'same');
G_Y = conv2(img1, sobelMaskY, 'same');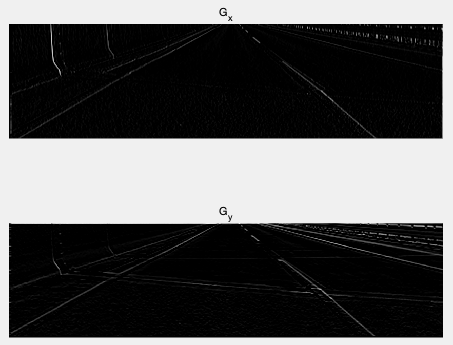
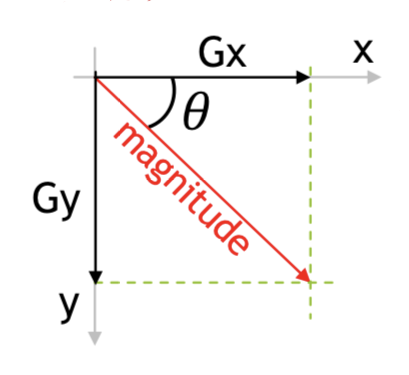
Magnitude of the gradients
- 수평 및 수직 성분 기울기의 크기 == edge의 세기
Euclidean distance == 대각선의 크기, 대각선 edge에 민감
➡️ Road에 대한 사진은 원근법으로 인해 Lane Line이 대각선으로 보이기 때문에
위에서 Sobel Mask를 써서 구한 의 Euclidean distance를 구하여 Magnitude를 구할 것이다.
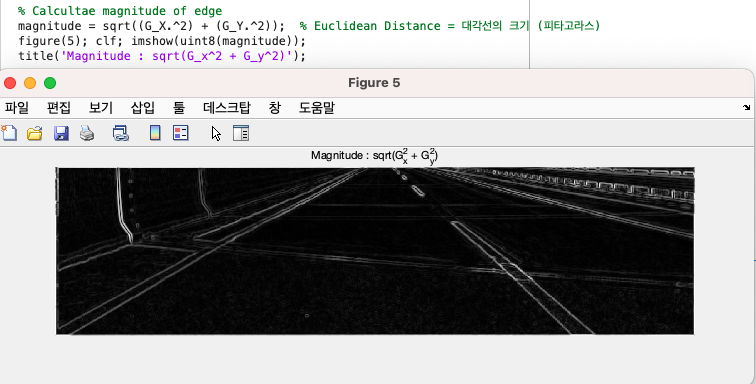
- 위 그림에서 알 수 있듯이, edge의 세기가 클수록 명확한 edge를 의미.
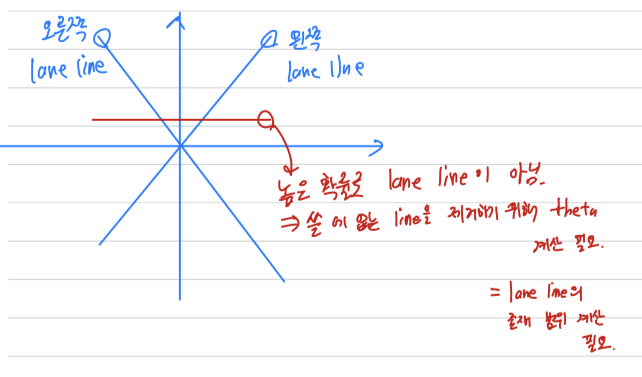
Angle of the gradients
- 아래 그래프에서 처럼 오른쪽 lane line, 왼쪽 lane line은 대각선의 형태일 확률이 매우 높고,
x축과 평행한 직선으로 보일 확률은 매우 작기 때문에
쓸데 없는 line들을 제거하기 위해 theta 계산이 필요하다.
Quantization
-
arctan: range[- ~ +],
range[ ~ ],
range[- ~ -],
... -
arctan2: range[- ~ +]
➡️ arctan2는 arctan이 의 범위에 따라 있는 그래프를
- ~ 의 범위로 그려준다.
따라서 값을 정확하게 준다.
따라서 공간 상의 움직임을 구현하기 위해서는 arctan2를 사용해야 한다.
arctan2를 이용하여 를 얻었을 것이고, 그 를 range[0, 360]로 만든다- 그리고 나서 를 4가지 구간 (0, 1, 2, 3)으로 quantization한다.
➡️ edge의 기울어진 정도를 4가지로 quantization하기 위해
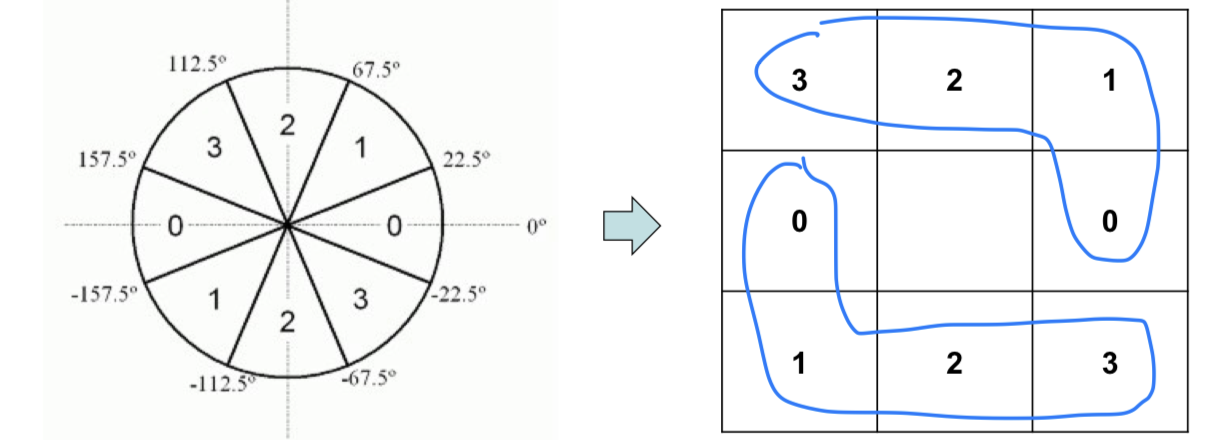
- 왜 8개 방향인가? 한 pixel을 중심으로 주변에 있는 pixel이 8개이므로
Non-Maximum Suppression
-
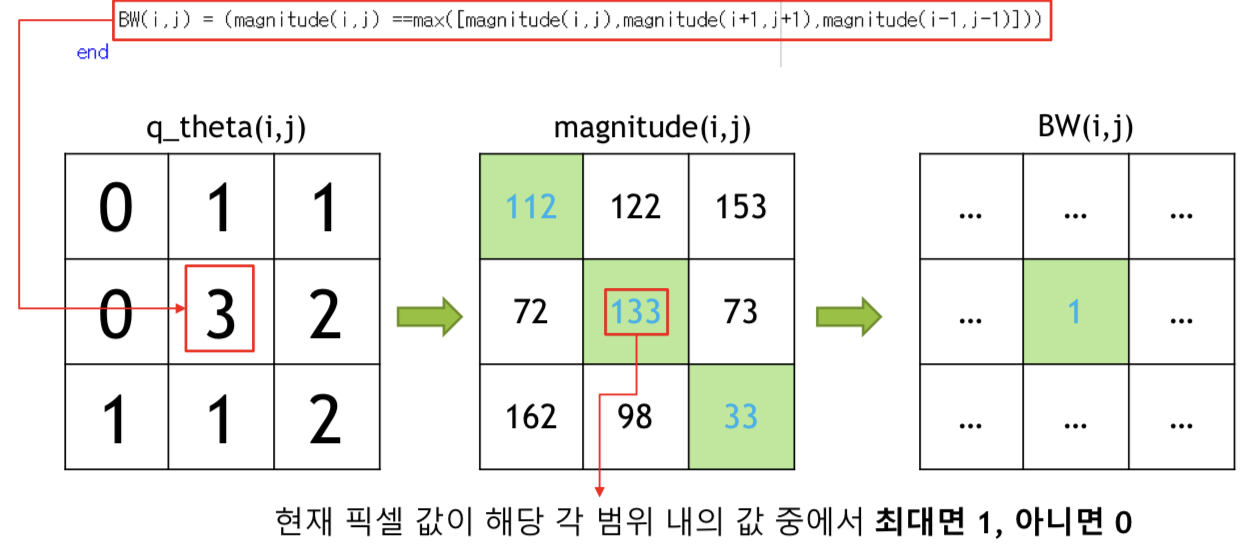
Non-Maximum Suppression:
지역적으로 최대값이 아닌 Edge를 제거하는 과정.
Edge에 기여하지 않는 pixel을 제거 (0으로 만듦)
➡️ 진짜 edge가 아닌데도 검출되는 pixel들이 있기 때문.
➡️ Blurring 현상을 없애고 Sharp한 Edge로 변경 필요하기 때문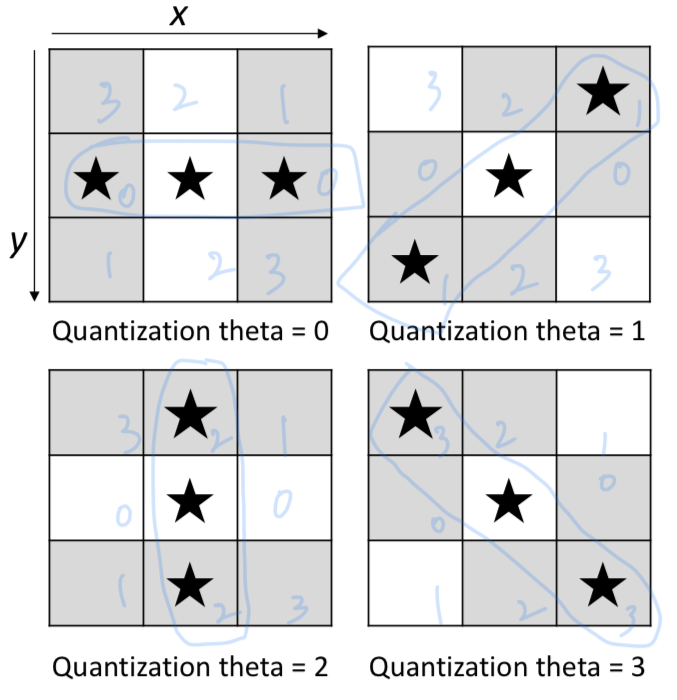
-
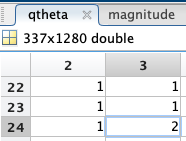
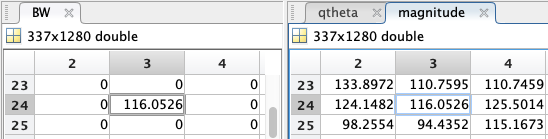
24row 3column을 봤을 때, quantization = 2이다.
따라서 max(23row 3column, 24row 3column, 25row 3column) 연산을 했을 때,
결과가 24row 3column이기 때문에 지역적으로 최대값을 가지므로 제거되지 않음.
-
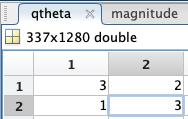
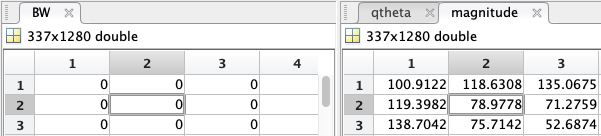
2row 2column을 봤을 때, quantization = 3이다.
따라서 max(1row 1column, 2row 2column, 3row 3column) 연산을 했을 때,
결과가 1row 1column이기 때문에 지역적으로 최대값이 아니기 때문에 제거
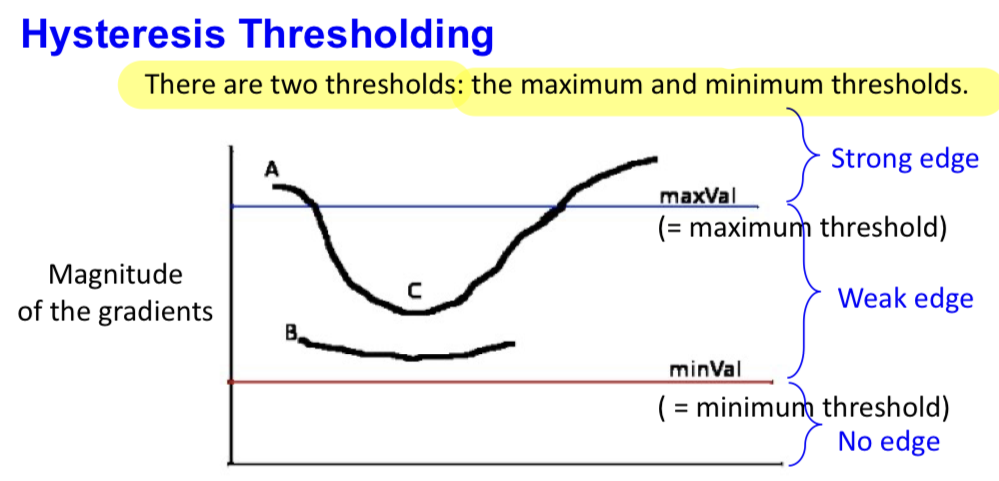
Hysteresis Thresholding
-
두 개의 Thresholds로 Edge인지 아닌지 추론하는 단계.
- Maximum Threshold = 0.2 * (pixel 중 최대값)
- Minimum Threshold = 0.1 * (pixel 중 최대값)
-
Strong Edge: Maximum Threshold < 현재 pixel값
Weak Edge: Minimum Threshold < 현재 pixel값 < Maximum Threshold
No Edge: 현재 pixel값 < Maximum Threshold -
하지만 Strong Edge pixel들만 Edge로 판단할 경우,
영상의 noise로 인해 Edge Pixel인데도 제대로 인식되지 않을 수 있다.
그래서 Strong Edge와 인접한 Weak Edge Pixel을 Strong Edge로 판단해주어 Edge Pixel들끼리 서로 연결해줘야 한다.
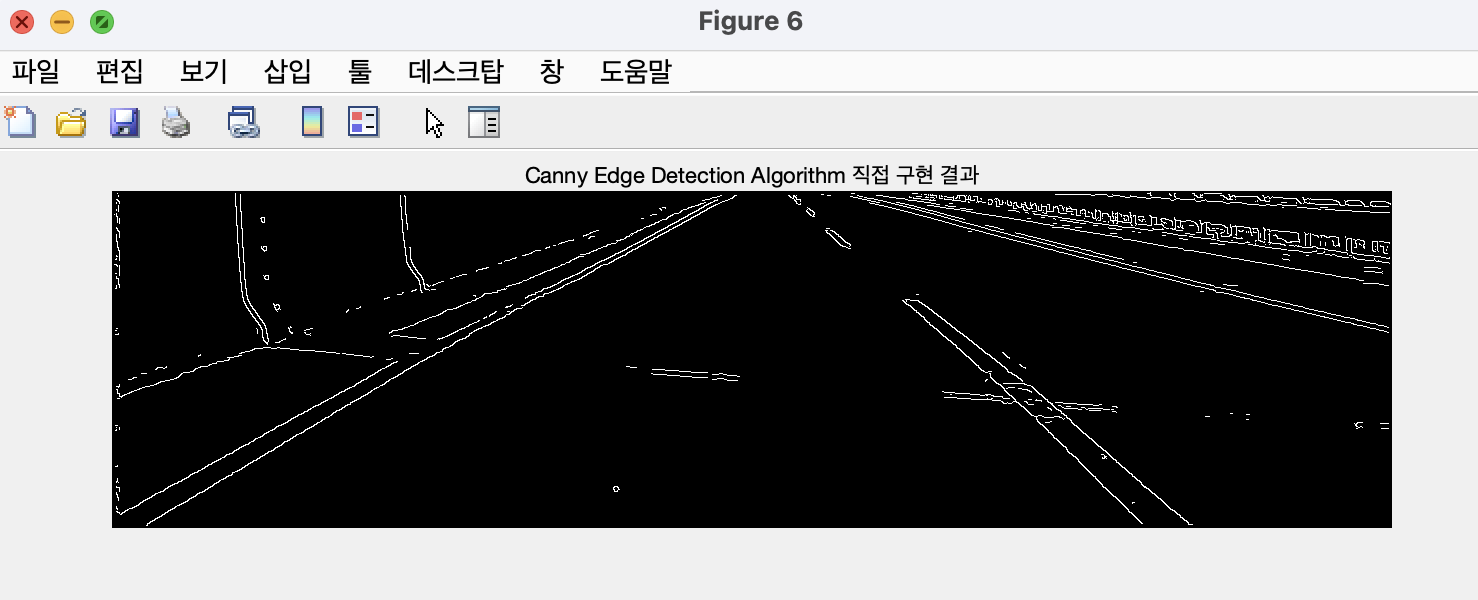
drawing edge map
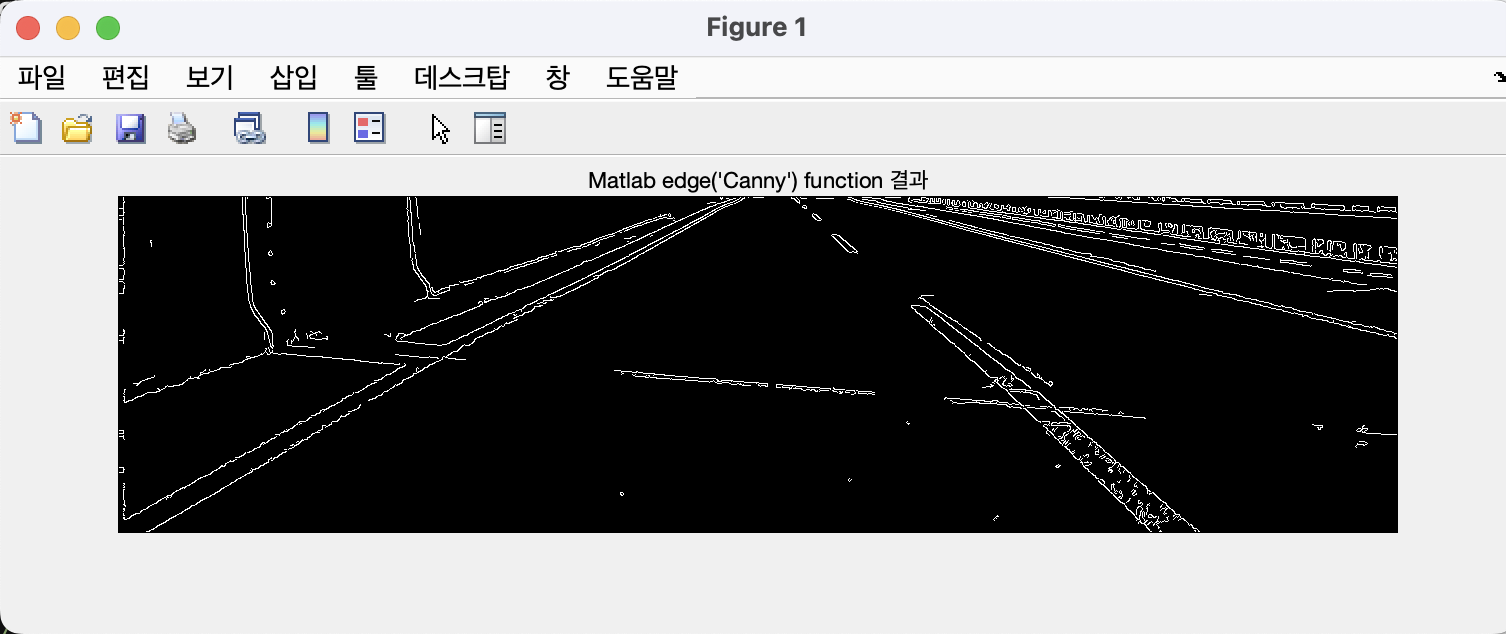
drawing edge map (Matlab제공 edge('Canny'))
- 다음은 Matlab에서 제공해주는 edge()함수를 통해 Canny Edge Detection Algorithm을 구현한 결과.