Lateral Control
Stanley 알고리즘
Stanley Algorithm: 주행중인 차량이 정해진 Target Path를 추종하기 위한 주행 방향.
즉 Steering angle 의 결정 logic.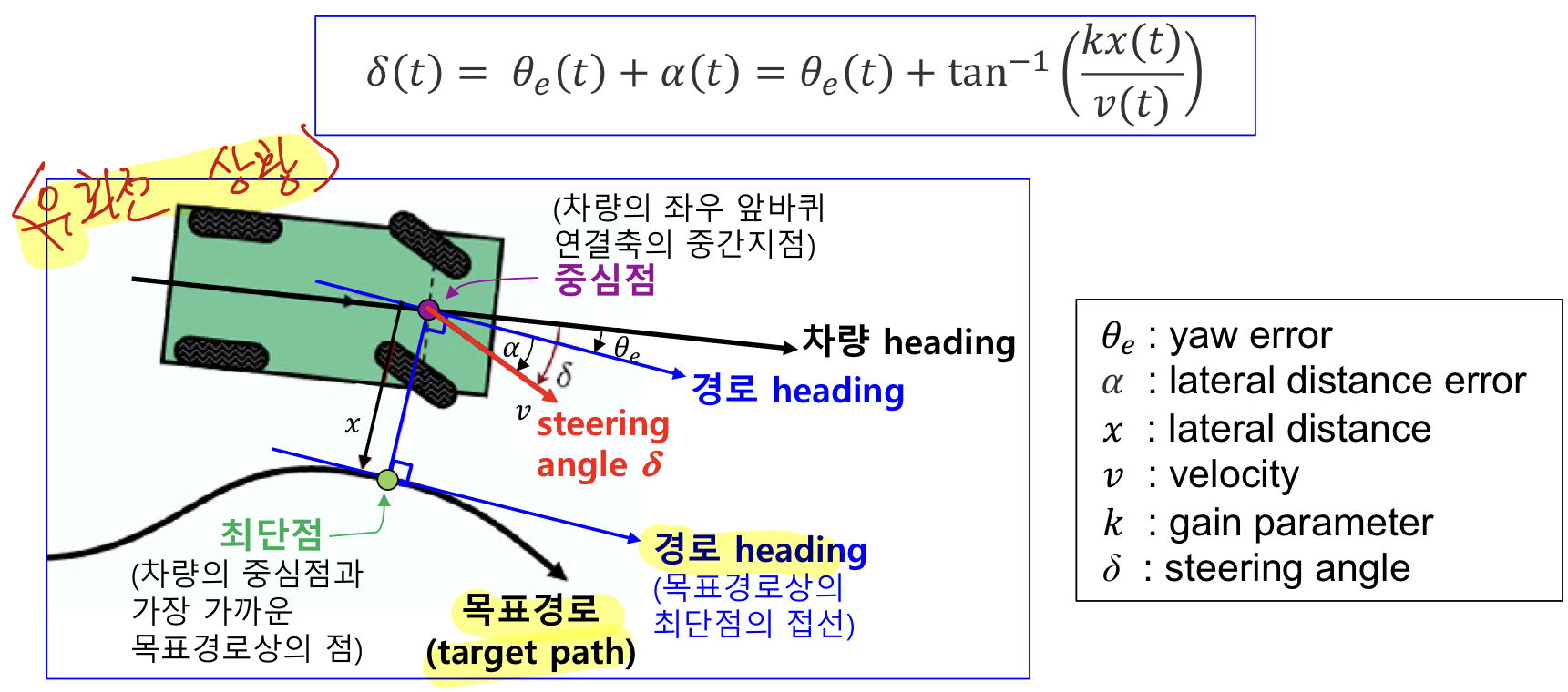
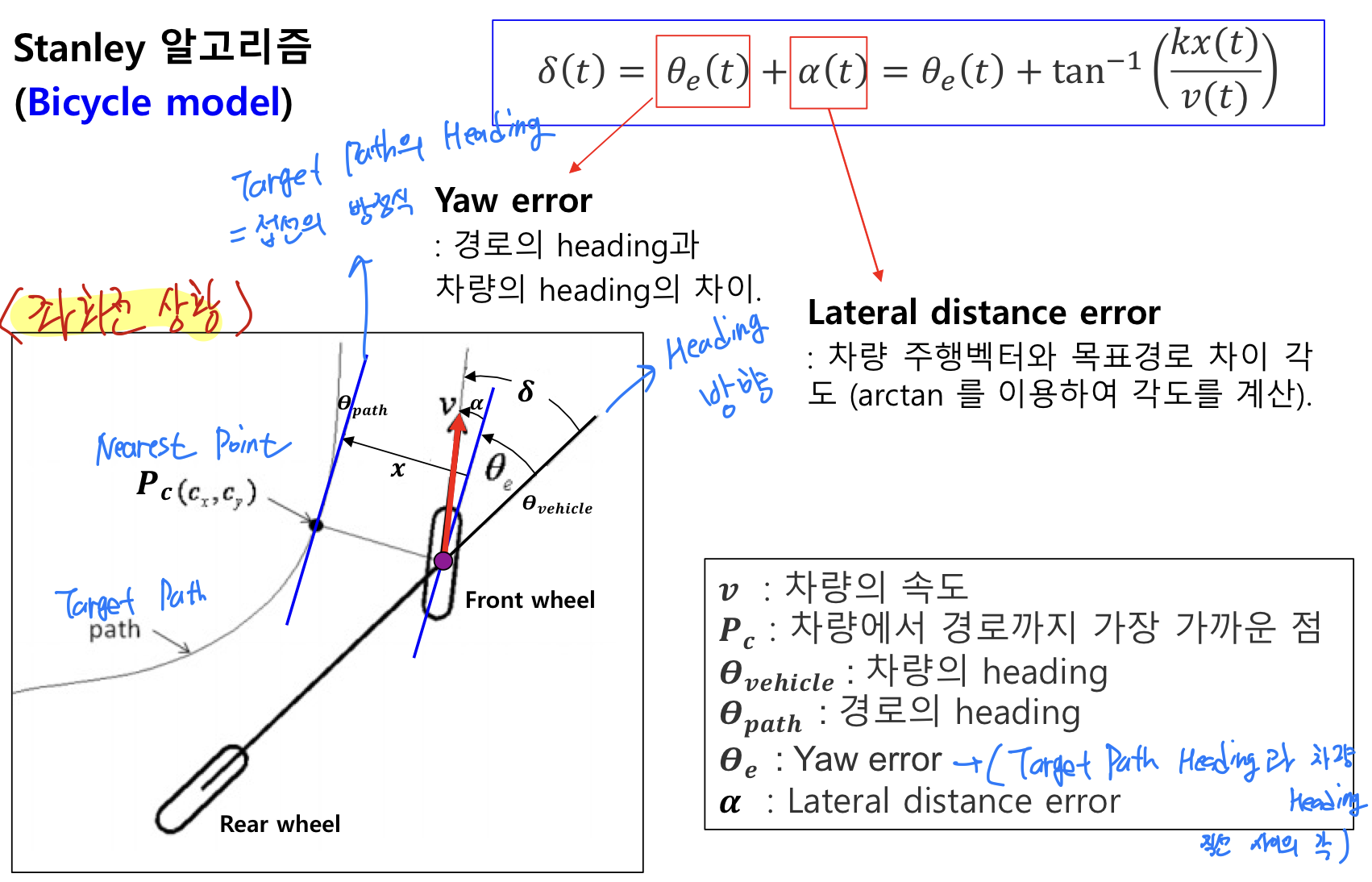
➡️ : yaw error. steering angle을 yaw error만큼만 돌리면, 차량은 target path에 도달할 수 없음.
(두 접선이 평행하기 때문)
따라서 만큼 더 꺾어야 한다.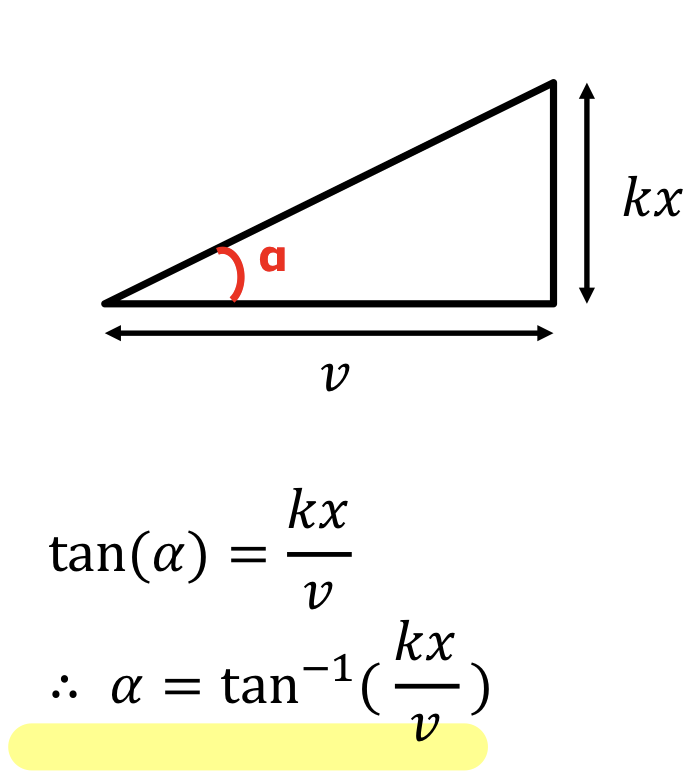 ➡️ 차량이 Target Path를 많이 벗어날수록 ➡️ 증가 ➡️ 증가 ➡️ Steering Angle() 증가
➡️ 차량이 Target Path를 많이 벗어날수록 ➡️ 증가 ➡️ 증가 ➡️ Steering Angle() 증가
➡️ 속력(v)이 높을수록 ➡️ 감소 ➡️ Steering Angle() 감소
Stanley Simulation (3.1. ~ 3.6.)
동작 Diagram
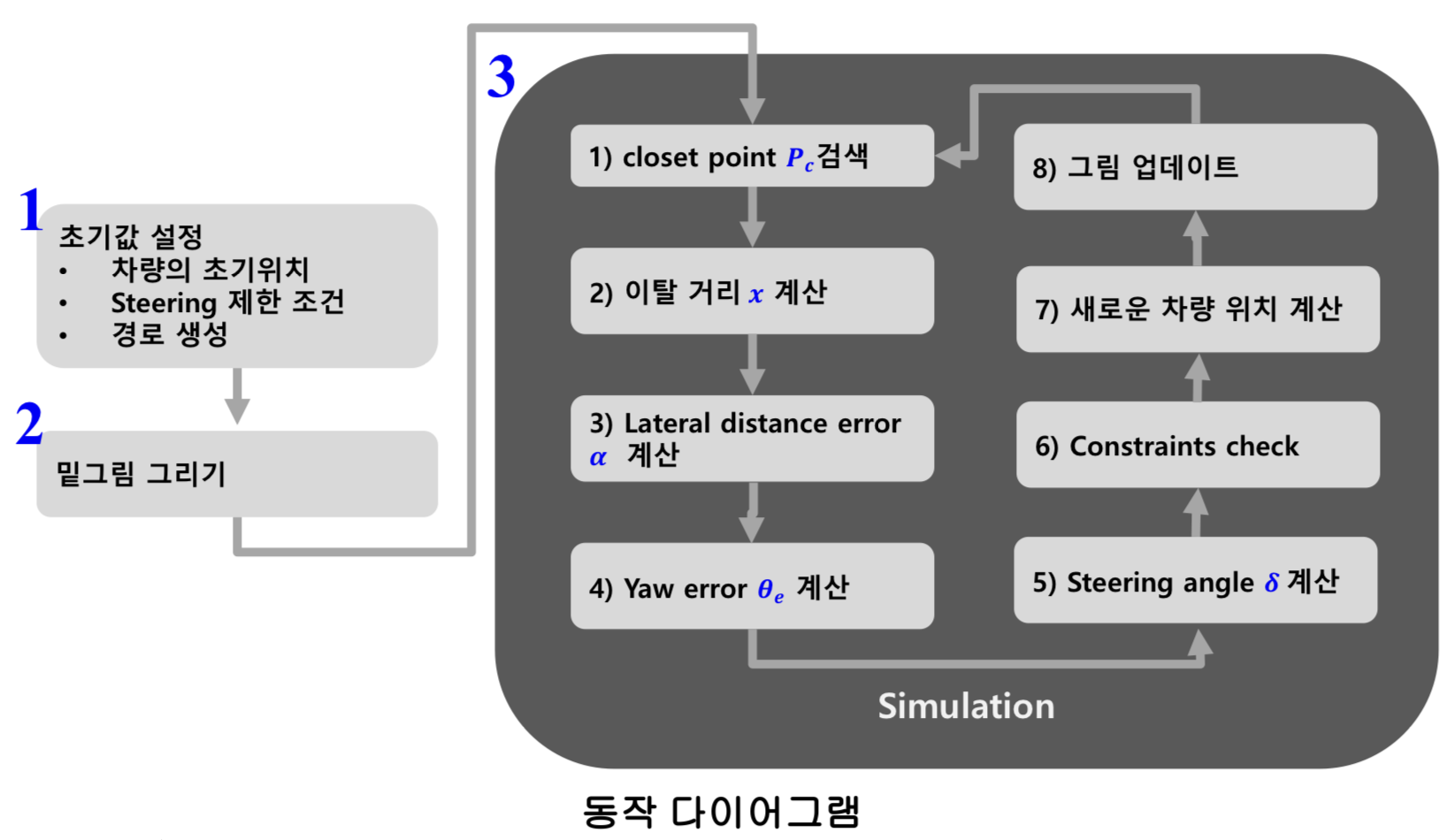
1. 초기값 설정
- 차량의 초기 위치 : x position, y position ➡️ (0, 0)
- Steering 제한 조건 : -40.95 ~ 40.95 (deg)
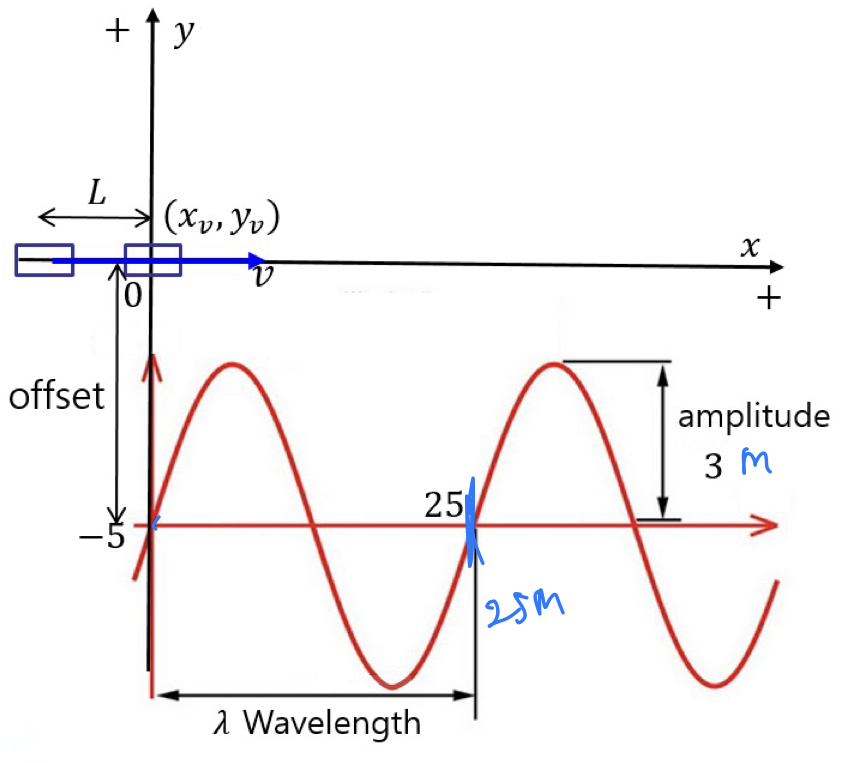
- Target Path 생성 : way point amplitude, wave_length, offset of path ➡️ Sine Wave
시간 영역을 공간 영역으로 바꿔야 함.
: ➡️
2. 밑그림 그리기
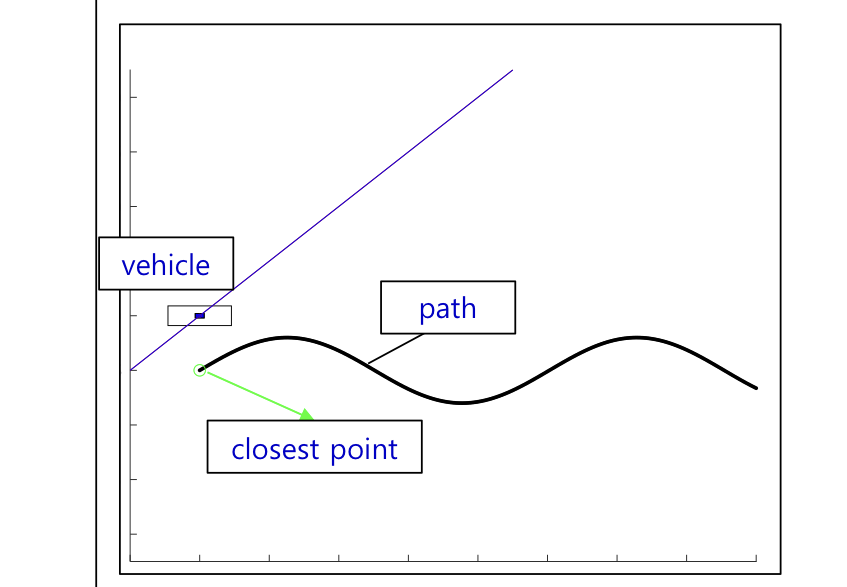
3.1. Closet point 검색
- 차량으로부터 가장 가까운 점 를 찾는다.
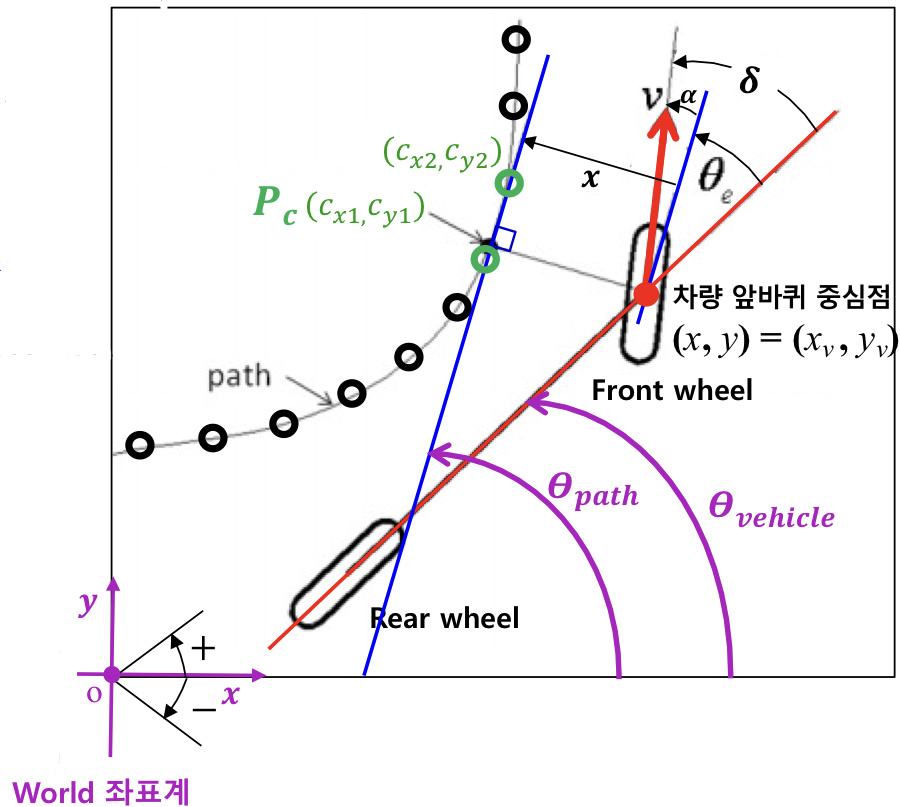
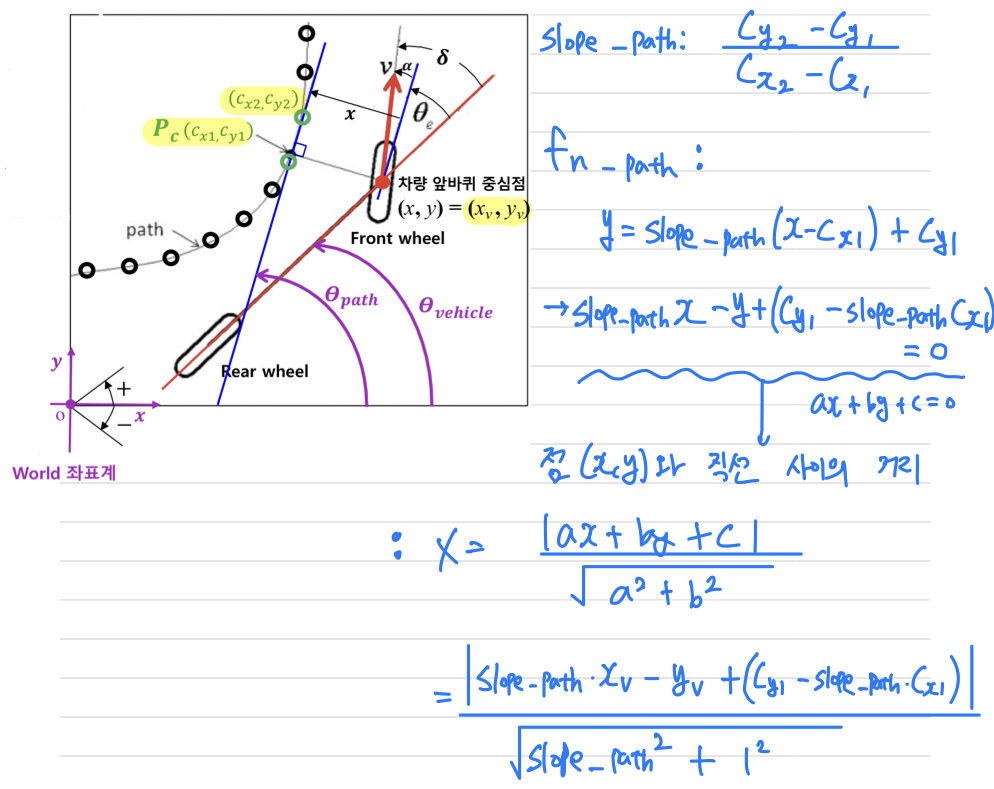
3.2. Lateral Distance X 계산 (크기)
- Target Path의 직선과 차량의 Heading 직선의 이탈 거리 의 크기를 계산.
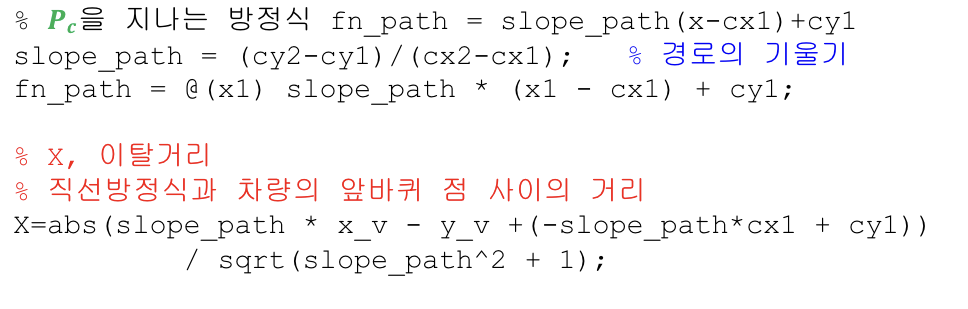
- Closet Point 를 지나는 직선의 방정식 은 다음과 같이 계산한다.
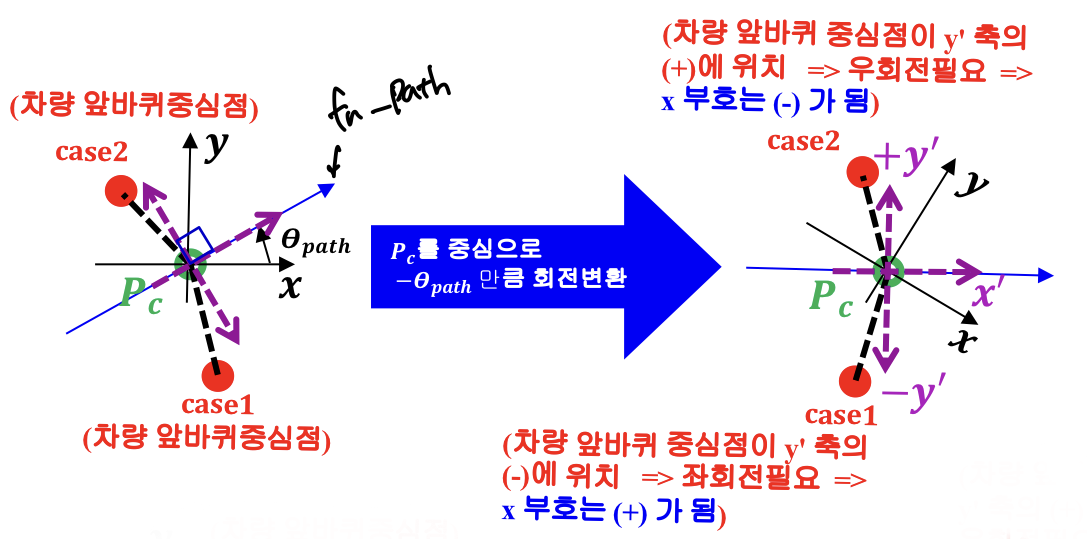
3.2. Lateral Distance X 계산 (부호)
- 차량이 (Target Path)의 왼쪽에 있으면 우회전, 오른쪽에 있으면 좌회전을 해야 하는데...
차량이 Target Path의 왼쪽에 있는지? 오른쪽에 있는지? 어떻게 알 수 있을까?
➡️ Target Path에서 의 접선의 방정식 는 WORLD 좌표계에서 만큼 기울어져 있다.
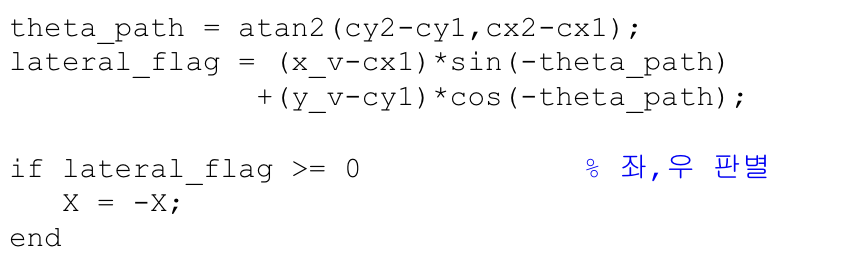
➡️ 를 x축과 일치하도록 를 기준으로 -만큼 회전변환을 수행한다.
- case 1 == 회전 변환된 새로운 좌표계에서 차량 앞바퀴 중심점의 가 (-)에 있는 경우 :
차량이 Target Path의 오른쪽에 있었으니 좌회전해야 한다. - case 2 == 회전 변환된 새로운 좌표계에서 차량 앞바퀴 중심점의 가 (+)에 있는 경우 :
차량이 Target Path의 왼쪽에 있었으니 우회전해야 한다.
3.3. Lateral Distance Error 계산


3.4. Yaw Error 계산
- Yaw Error

3.5. Steering angle 계산
- Steering angle

3.6. Constraints check
- 3.1.에서 정의한 차량의 조향 제약 조건(Steering 각속도 limit?, Steering angle limit?)을
만족하는지 check
3.7. 새로운 차량 위치 계산
3.8. 그림 update
실습 Github

Efficient Deep Learning