GPS
GPS(Global Positioning System)는 GNSS(Global Navigation Satellite Sysem) 중 하나로 물체의 위치, 고도 및 속도 등을 측정하는 위성항법시스템이다.자율주행에 있어서 Localizatoin(내 위치 정보 찾기)이 중요하다.- Ground Vehicle은 Localization이 수월하다.
- 그런데 비행기, 드론 등은 지상에 떠있기 때문에 까다롭다.
GPS 위성의 궤도 배치- 모든 위성의 고도는 20,200km, 12시간을 주기로 지구를 회전
- 총 궤도는 6개, 각도는 60도씩, 1개의 궤도면 당
GPS의 기본 원리
-
GPS의 기본 원리 : 위성기반 측위 시스템
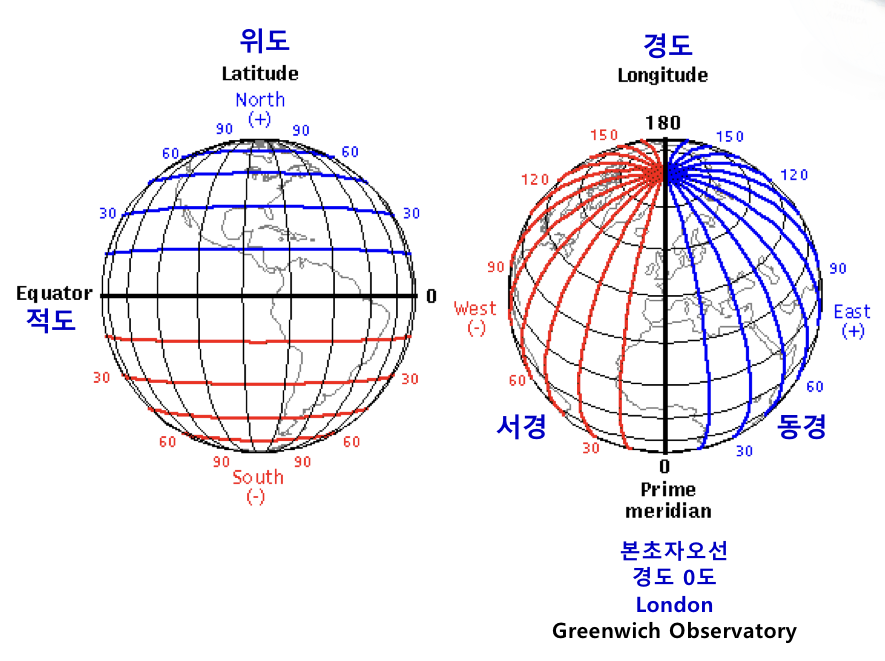
➡️ 위도(Latitude), 경도(Longtitude), 고도(Altitude)를 이용하여 위치 정보를 얻는다.
-
GMT(Greenwhic Mean Time) : 세계 표준시
➡️ UTC(Coordinated Universal Time) -
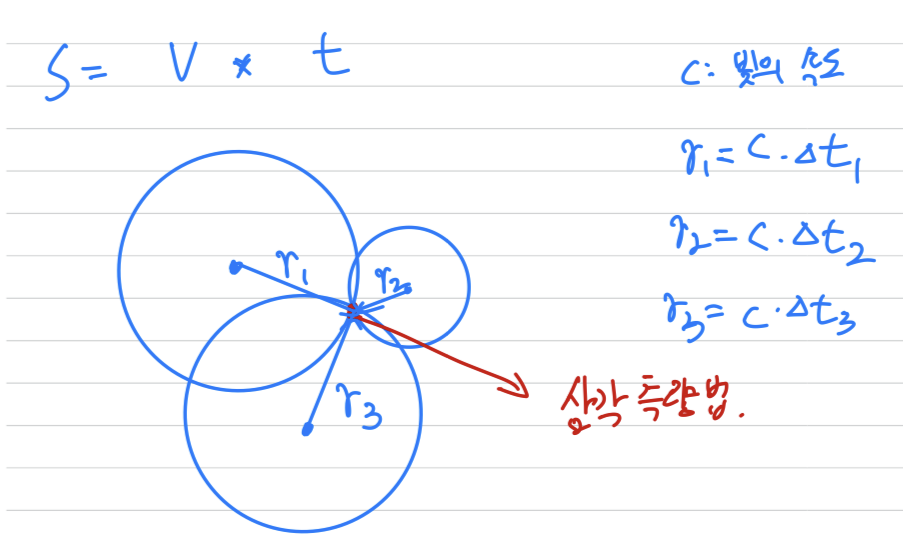
삼각측량법:
GPS를 통해 물체의 위치를 측정하기 위해 최소 3개의 위성으로부터 신호 수신 필요. (미국은 더 정확한 위치를 측정하기 위해 최소 4개의 위성 사용)
이 신호를 이용하여 삼각측량법을 통해 물체의 위치를 측정.
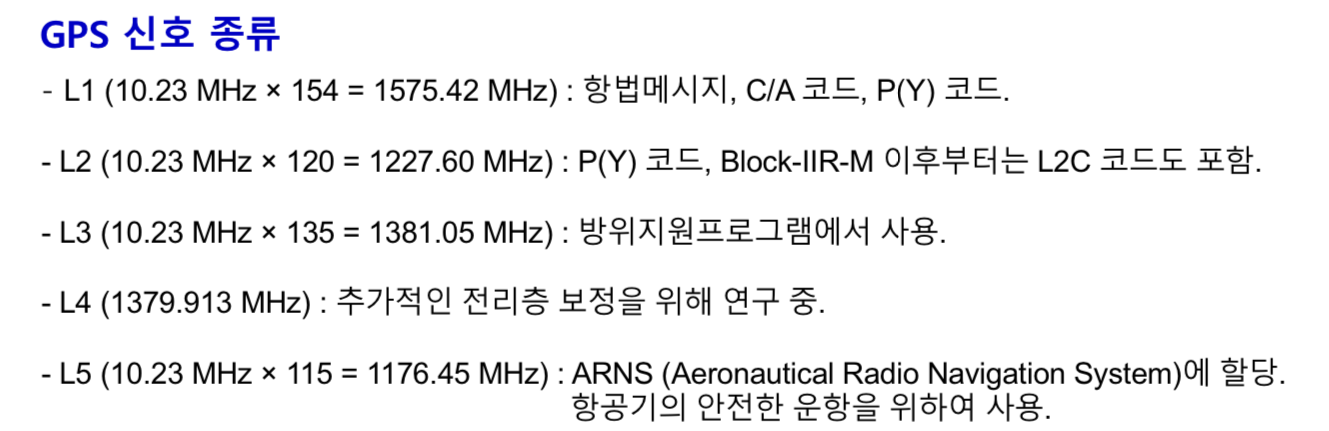
GPS 신호
- 위성에서 실제로 사용하고 있는 신호들은 여러 개가 있다.
그냥 단순 신호가 아니라 Encode가 되어 있다.
특정한 암호를 Encode하여 보낸다.
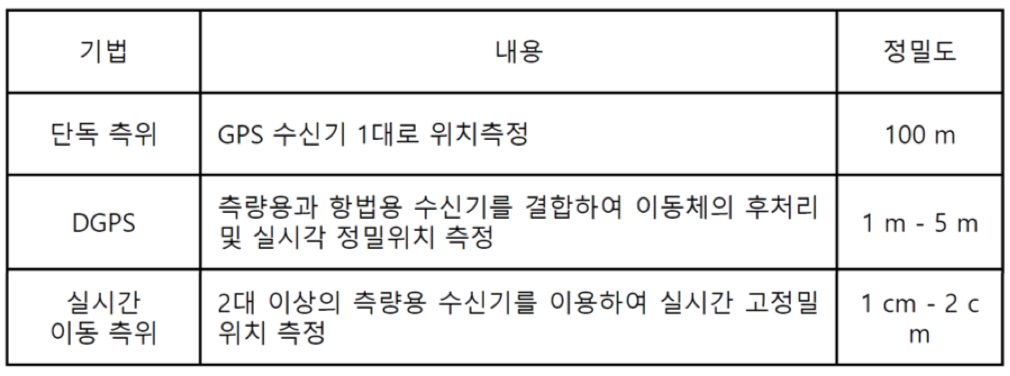
GPS 측량
SPS (Standard Positioning System, 단독 측위): 수신기 1대를 사용해서 위치를 측정DGPS (Differential GPS):
DGPS는 서로 가까운 거리에 위치한 두 수신기가 가지는 공통 오차를 상쇄하여
정밀한 데이터를 얻는 기술.
일반적으로 기준국(Base Station)에서 오차의 범위 등을 포함한 보정신호를
이동국(Rover)에 전송.- Base Station : 초정밀 시계와 고가의 수신기를 갖고 계산하여 전파를 전송
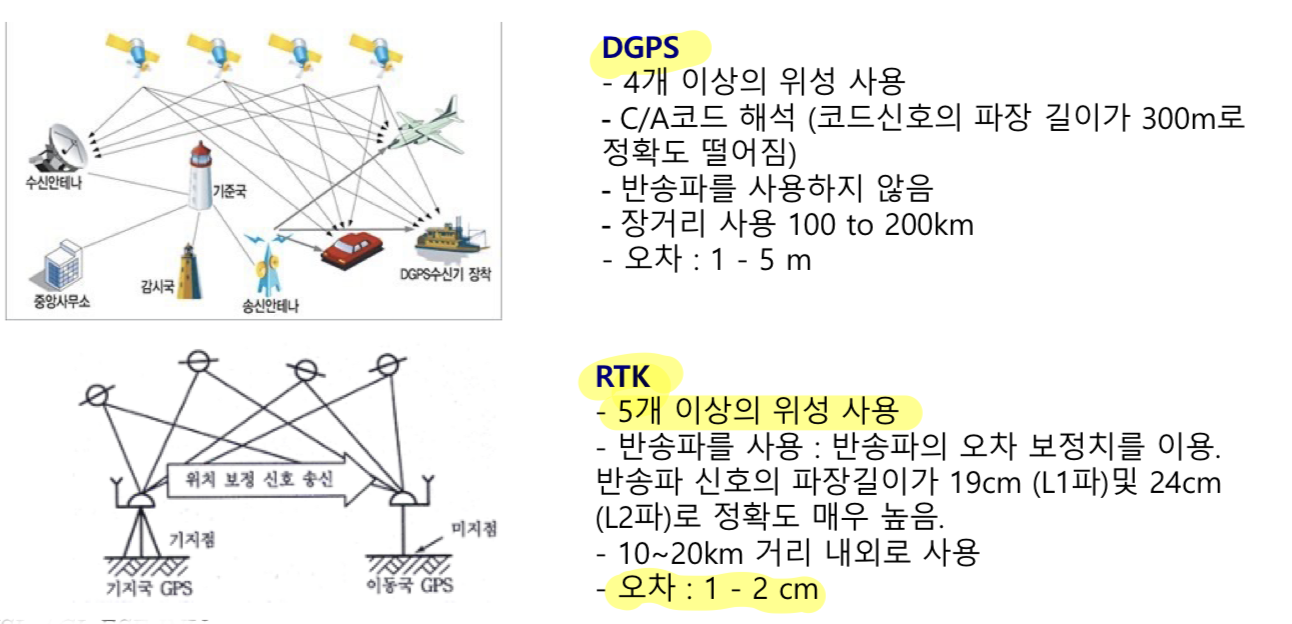
RTK (Real-Time Kinematic, 실시간 이동 측위):
RTK의 기본개념은 오차보정을 위해 기준국에서 전송되는 데이터가
반송파 수신자료라는 것을 제외하고는 DGPS의 개념과 동일
DGPS & RTK
GPS 오차와 해결 방안
- 상용으로 사용하는 GPS의 경우 약 5~10m의 오차가 지속적으로 발생한다.
multiple paths문제 : 특히 도심과 같이 높은 건물이 많고,
차량 위로 다양한 구조물이 있는 지역에서는
오차가 더욱 크게 발생하고, 위성에서 전파한 전파의 세기가 약해진다.
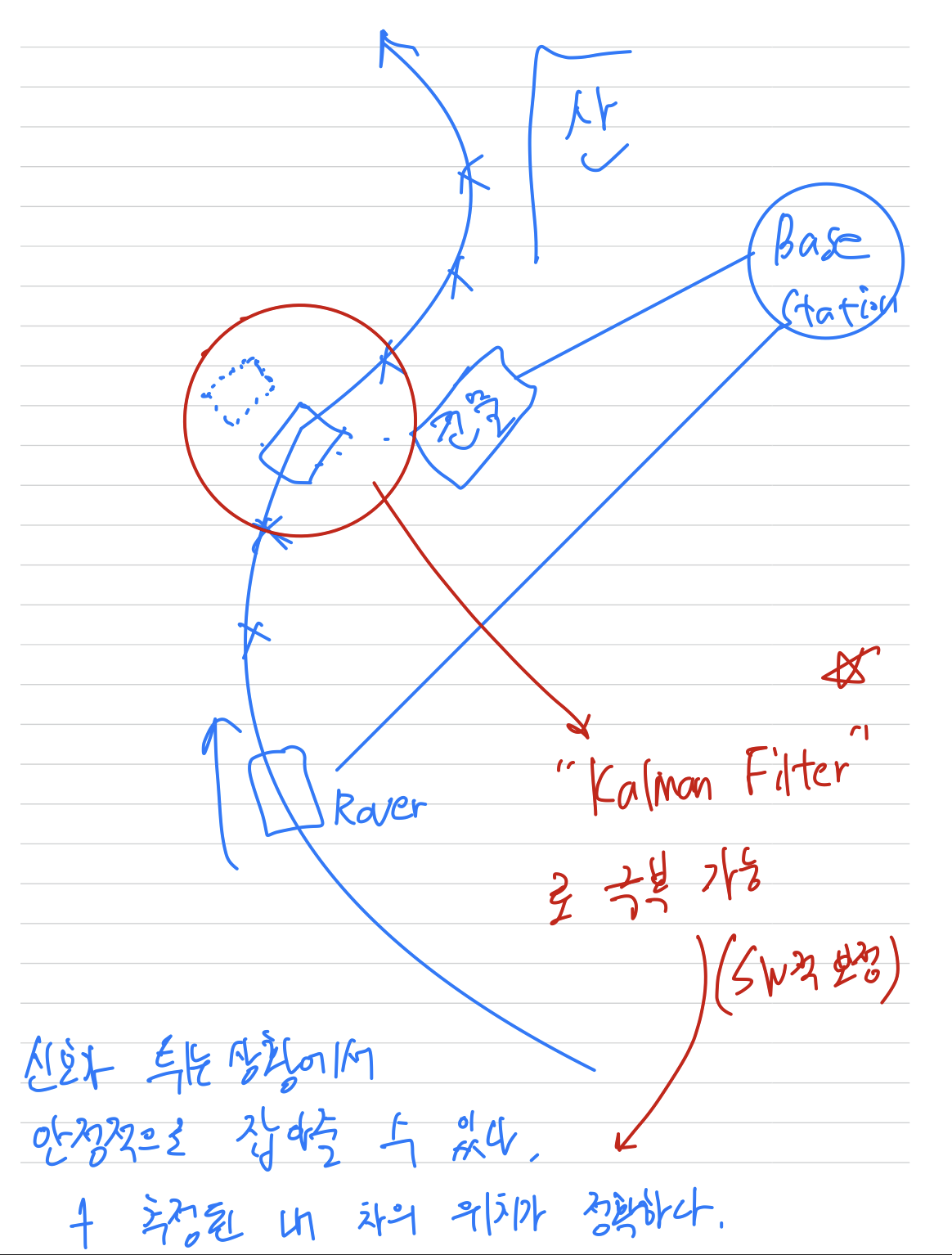
- 자율주행에서 Kalman Filter는 필수적이다..
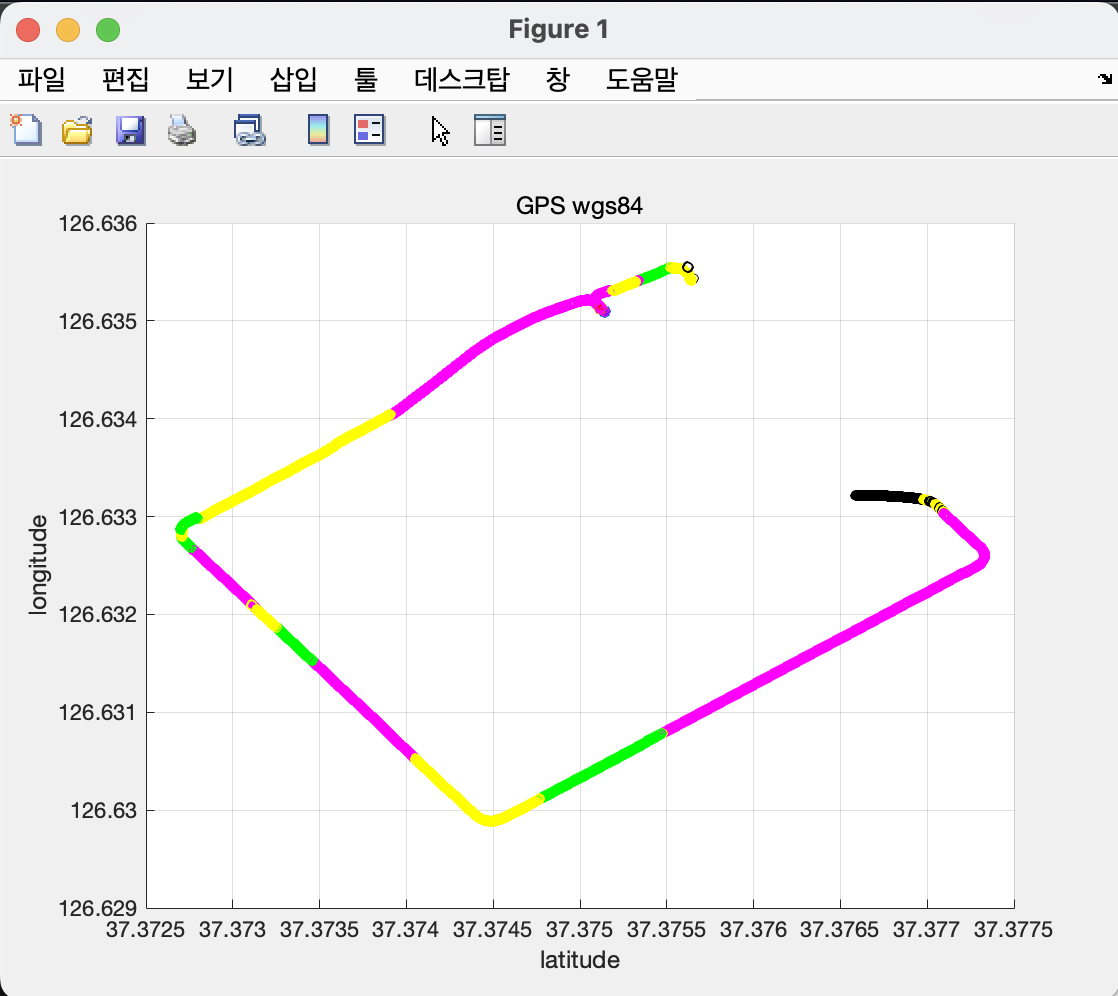
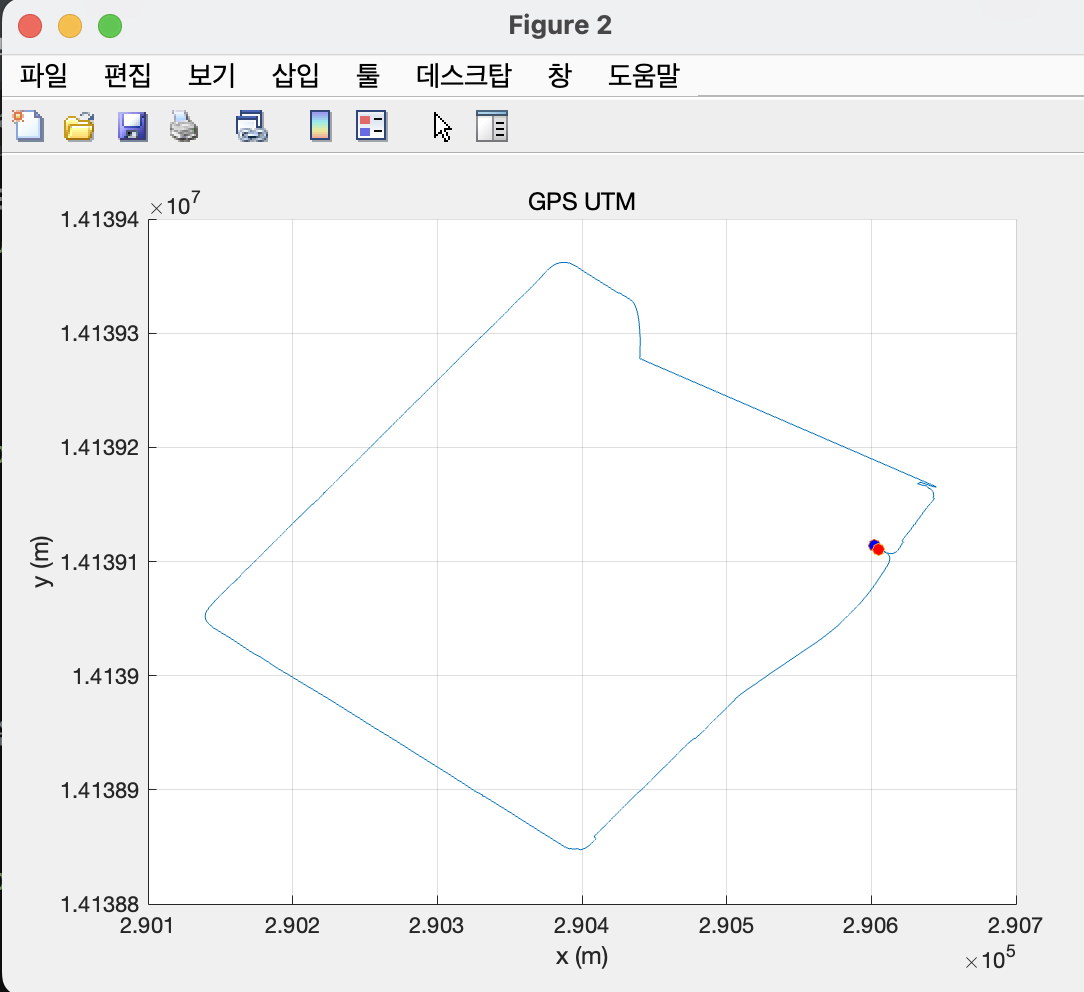
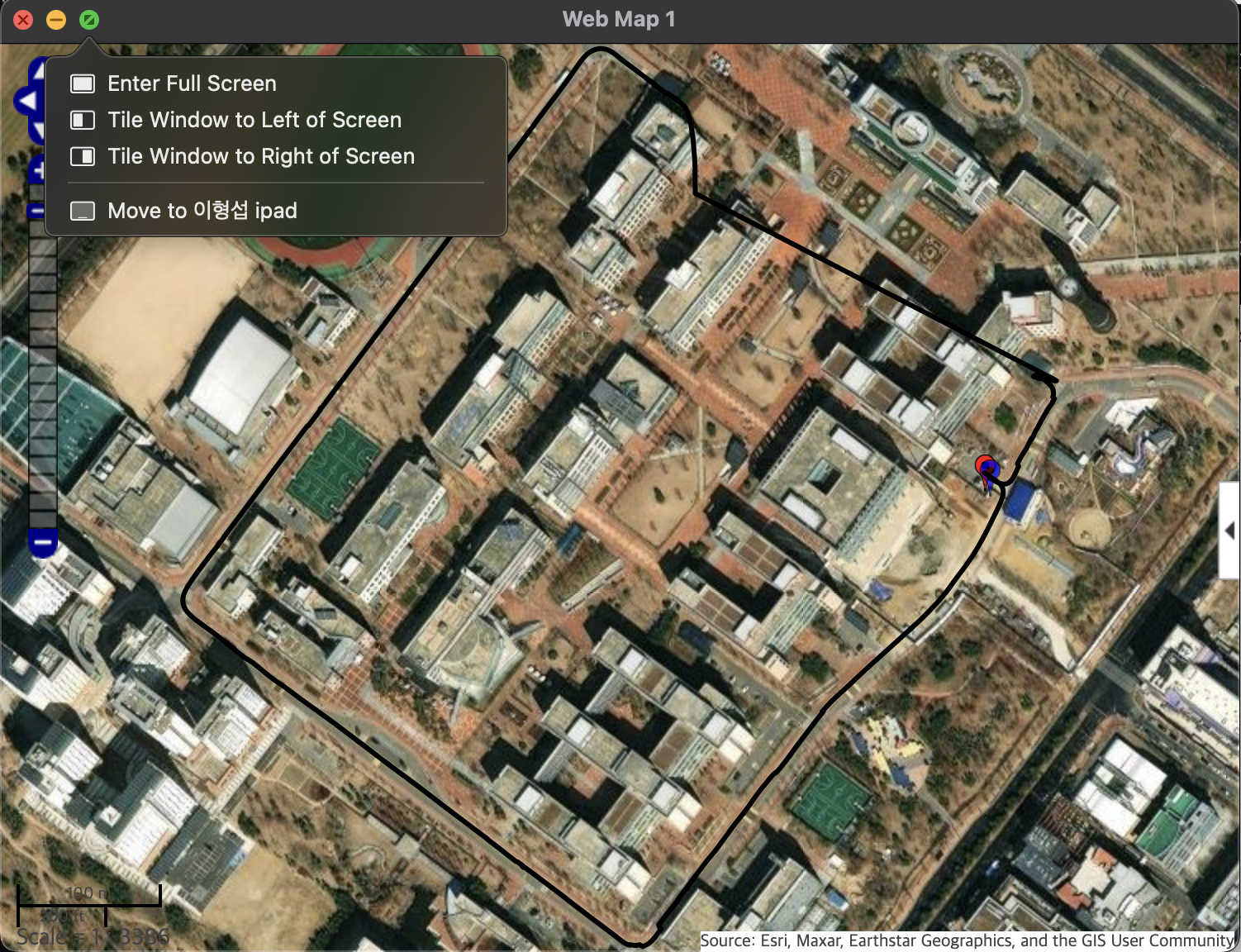
GPS 실습
- 인천대학교 외곽을 돌아다니면서 받은 GPS data 그려보기 (Matlab)
Lidar
Lidar 동작 원리
-
Lidar(Light Detection and Ranging):
Lidar는 light(=laser)를 이용하여 주변 환경 및 물체를 탐지하여 거리를 측정하는 Sensor.
(Ladar(Laser etection and Ranging)라고 불리기도 하지만 Lidar가 일반적 용어) -
Emitter에서 나간 pulse laser는 물체에 반사되어 receiver로 돌아 온다.
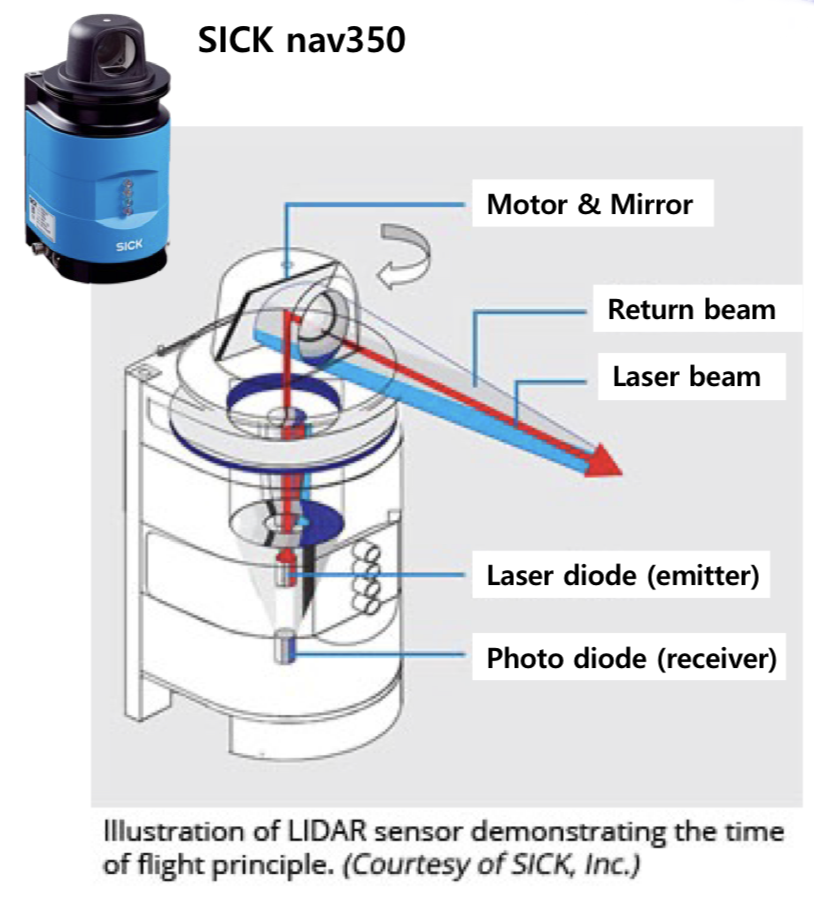
이때 pulse laser의 TOF(Time Of Flight)를 이용하여 물체의 거리를 측정.
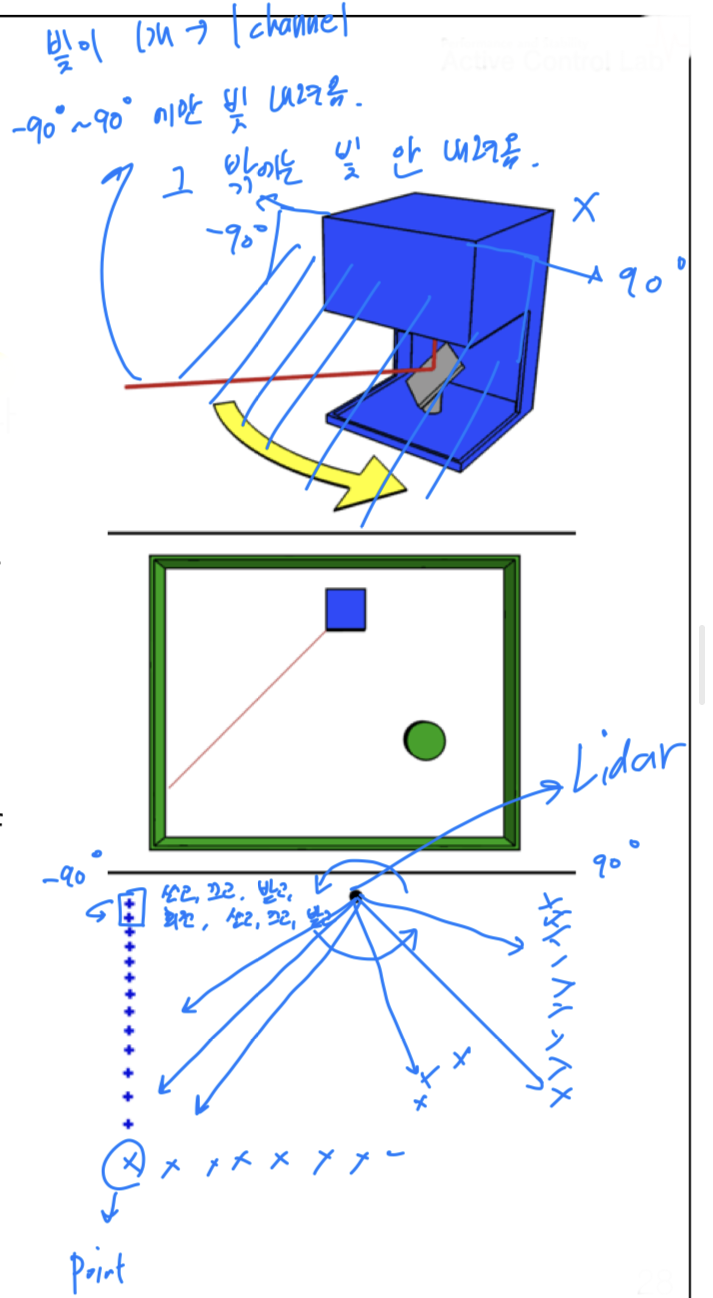
1 channel Lidar 예시
- 1 channel Lidar : Light 1개만 쏘는 lidar
Lidar 구조
-
SICK nav 350 Lidar
-
송신부:
encode된 Pusle를 쏜다.
지금 들어온 빛이 내가 쏜 빛인가? 다른 차들의 Lidar에서 쏜 빛인가? 를 알아야 한다.
도로에 Lidar기반 자율주행차들이 많아지면 빛들이 많아져서
noise를 많이 타게 되어 자율주행이 힘들어질 수도 있다. -
모터부:
모터부는 모터와 반사판으로 구성되어 있다.
모터는 반사판을 회전시키며, 송신부에서 송신된 pulse laser는 반사판에 반사되어 나간다.
이때 모터의 속도에 따라 Resolution이 달라진다. -
수신부:
photo diode를
말하며 물체에 반사되어 돌아온 pulse laser의 TOF를 이용하여 물체의 거리를 측정한다.
-
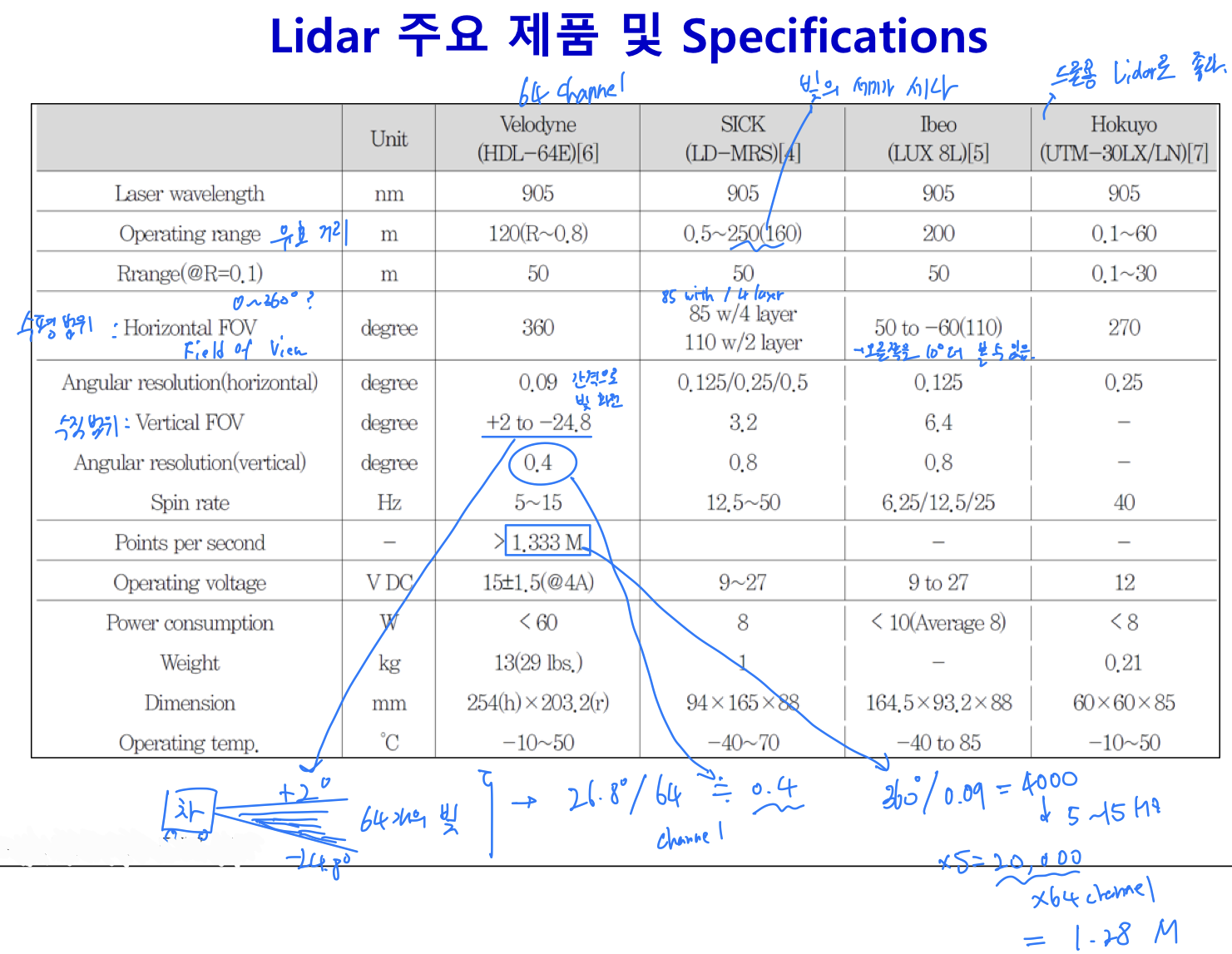
Lidar 주요 제품 및 Specifcations
- Lidar의 주요 제품 및 스펙을 살펴본다.
Lidar 거리 측정 기법
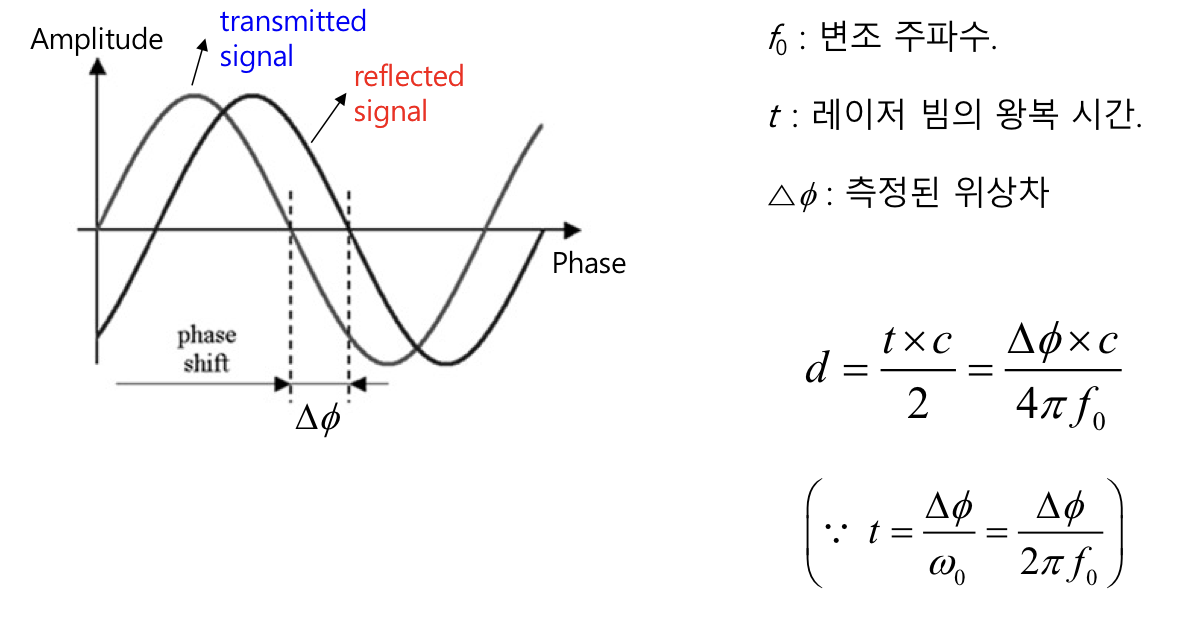
Pulsed TOF(Time Of Flight)Phase shift(위상변이): TOF보다 정확하게 거리를 측정할 수 있는 방법.
표적에서 반사되어 온 파형의 위상 변화량으로부터 거리를 환산.
Sonar
Sonar: Sound Navigation and Ranging
➡️ 음파를 쏴서 거리, 속도, 시간 계산
TOF for SONAR
Pulsed TOF(Time Of Flight)
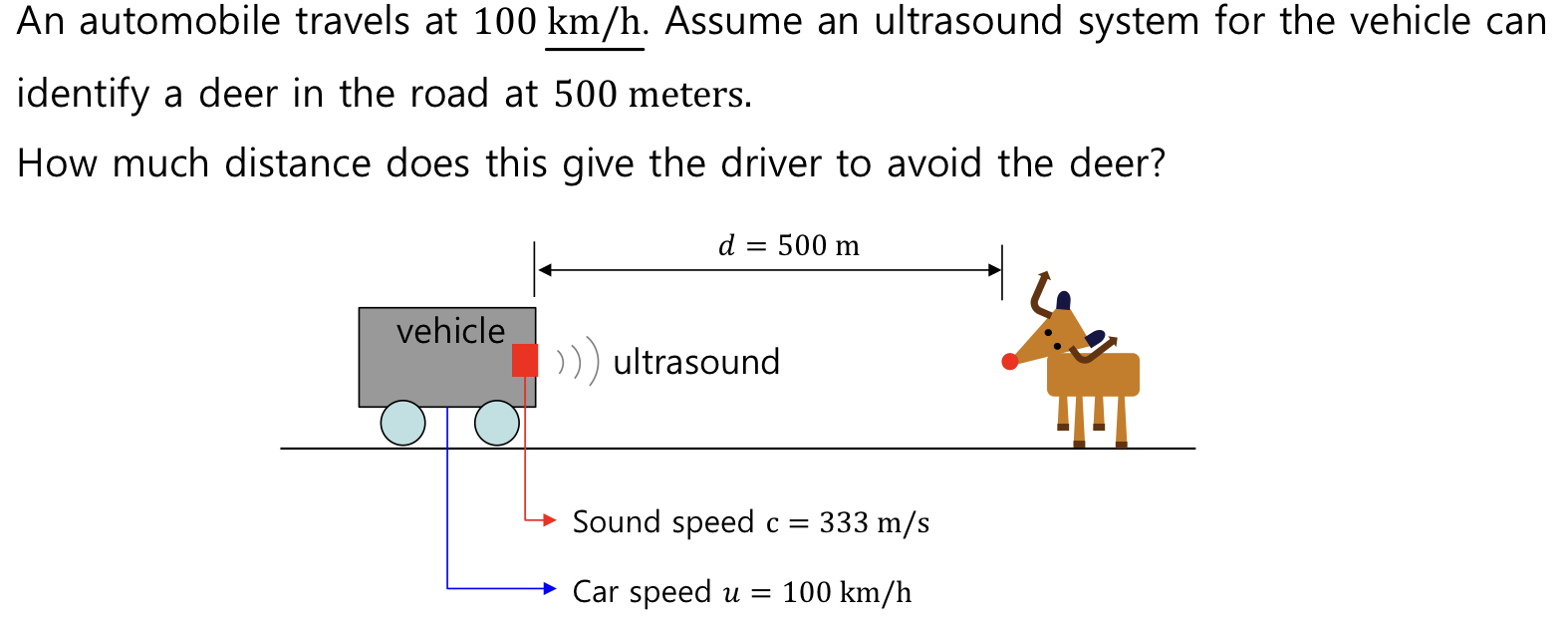
Time To Collide :
Time To Collide : 물체 A, B가 서로 마주 보고 다른 속도로 달릴 때 충돌할 때까지 걸리는 시간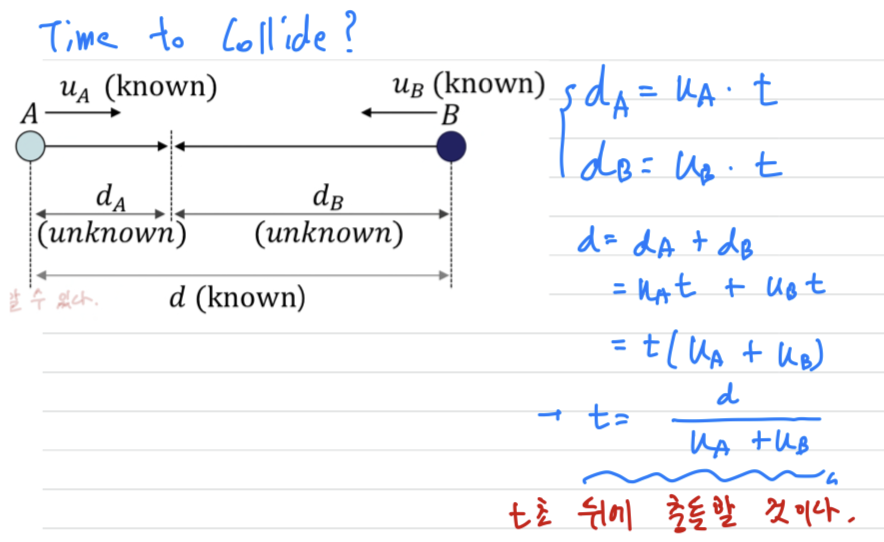
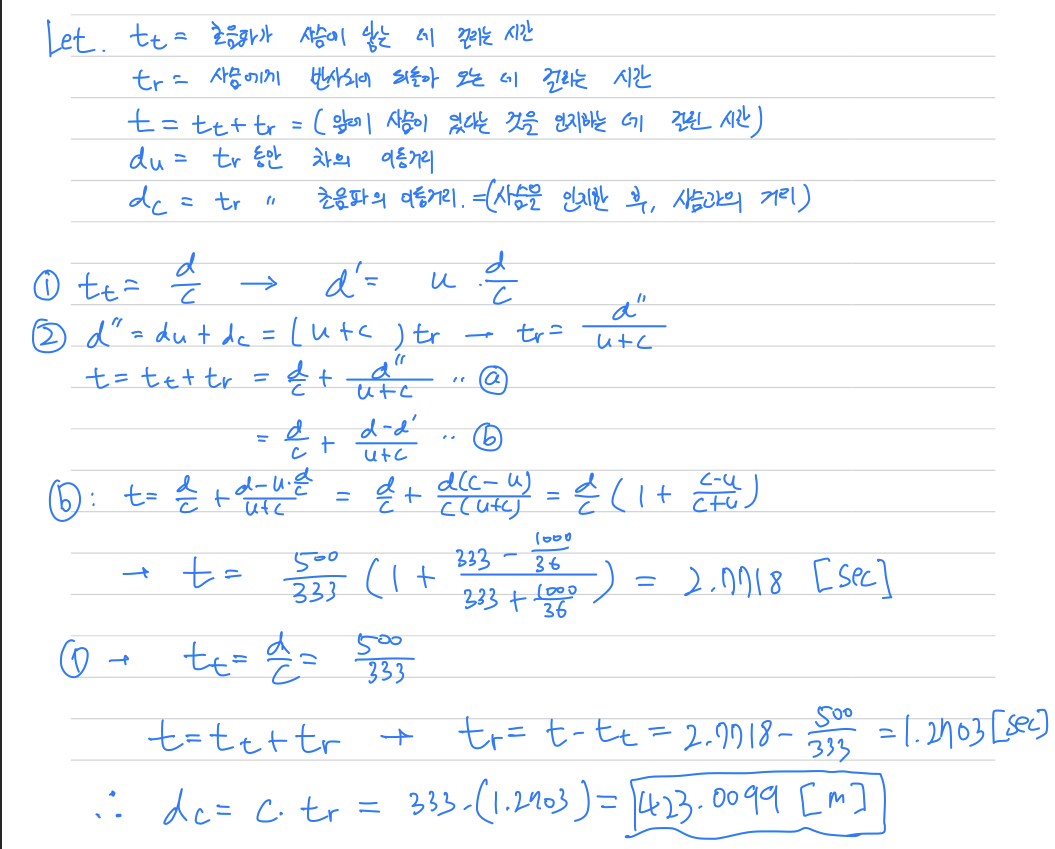
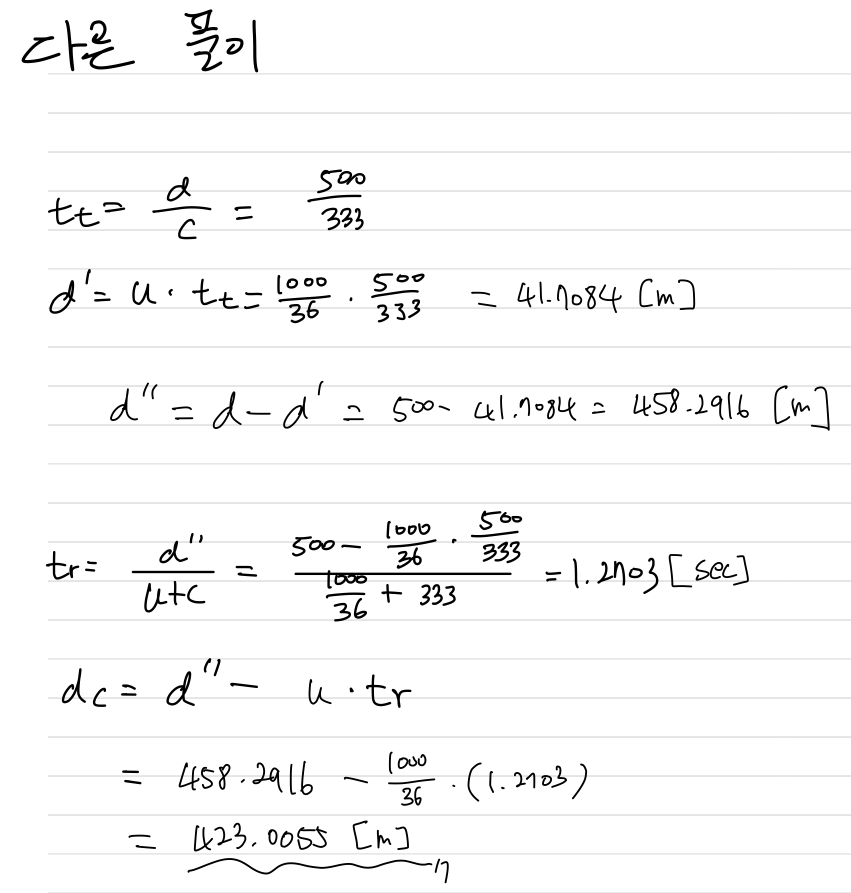
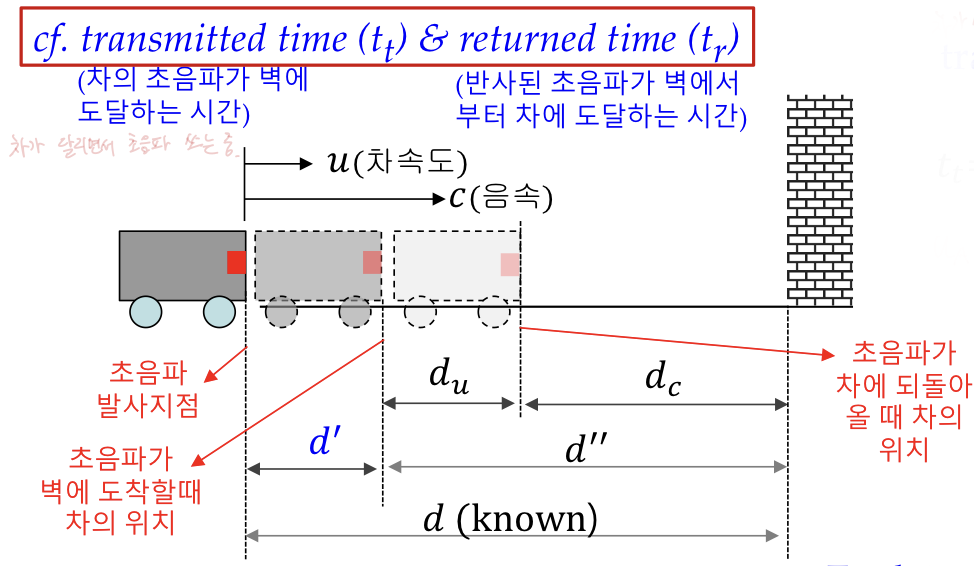
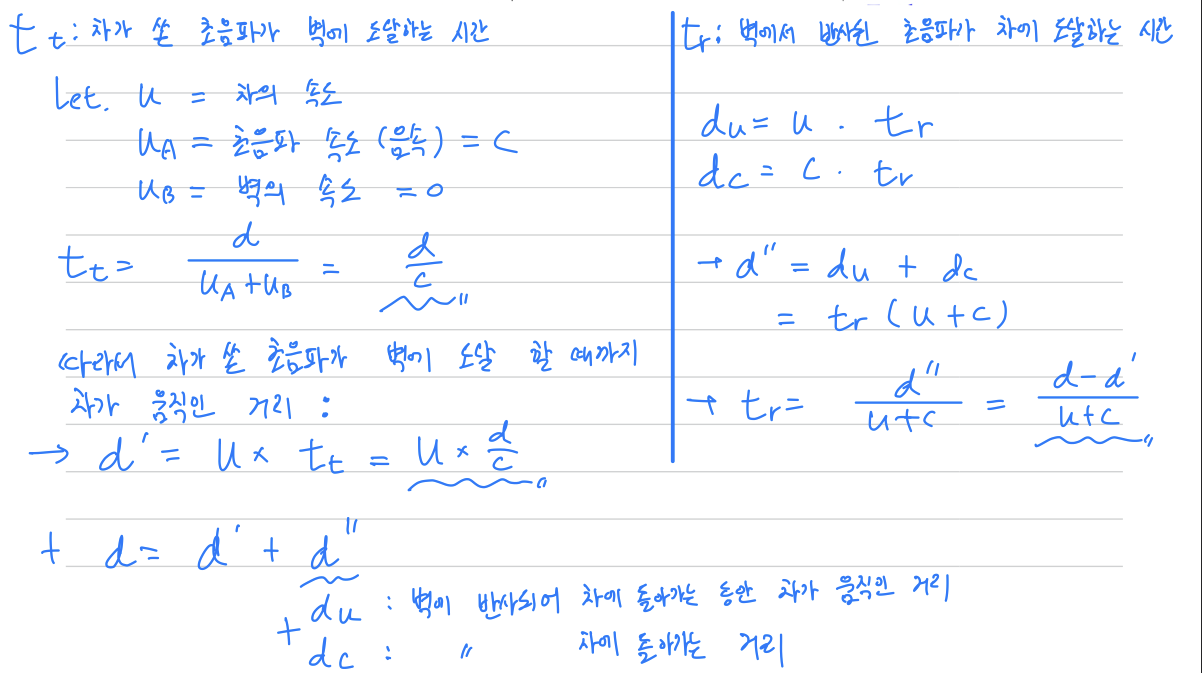
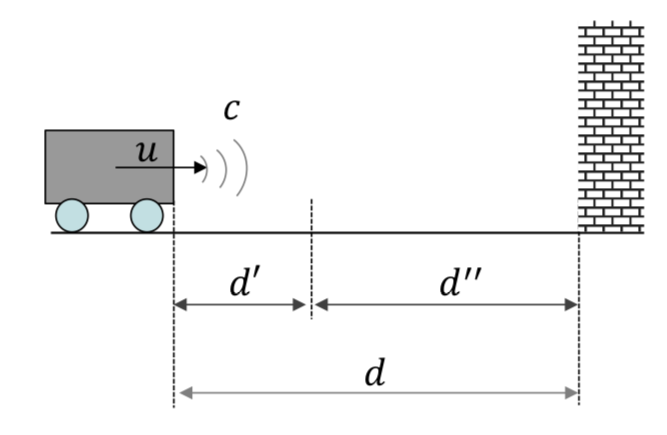
Transmitted time & Returned time
: 차에서 쏜 초음파가 벽에 닿을 때까지 걸리는 시간
: 벽에서 반사된 초음파가 차로 되돌아가는 시간
- example 1 :
-
example 2 :

-
example 3 :

-
example 4 :