인간운전차량 vs 자율주행차량
- 인간운전차량 사고 발생 : 주로 인간의 비이성적 판단 및 돌발 상황 대처 능력 부족
- 자율주행 구현 : 인간의 행동심리 이해와 예측 필요 (AI 필요성)
ADAS(Advanced Driver Assistant System)
AEB(Automatic Emergency Braking): ADAS 중에 가장 중요한 system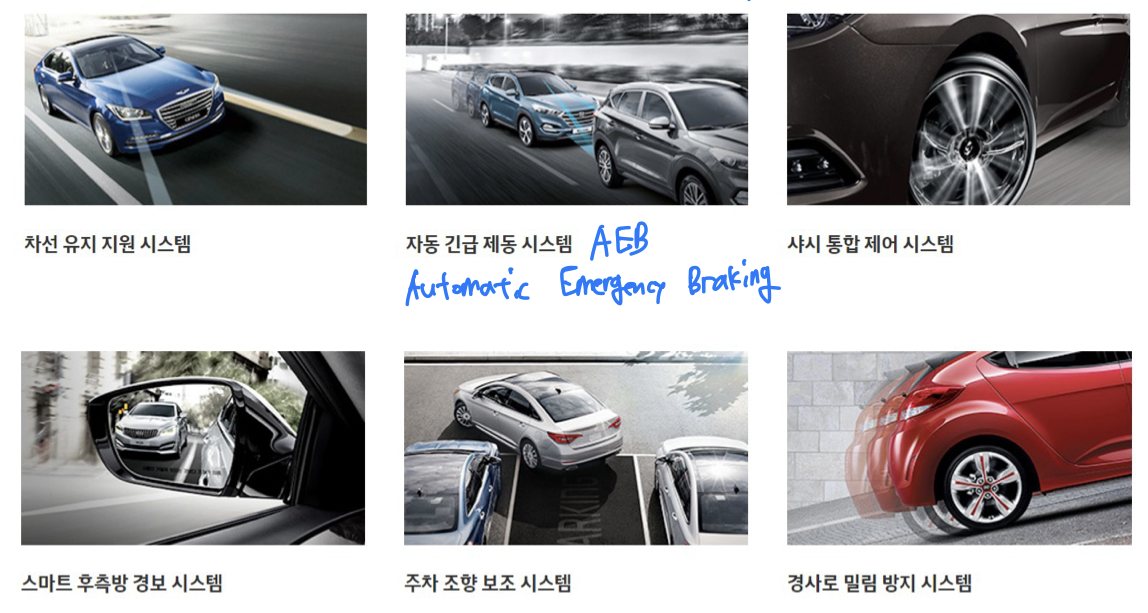
자율주행 자동차 기능 4가지
- 주어진 목적지까지 갈 효율적인 경로를 설정한다. (GPS, Map 필요)
- 주변 상황을 인식한다.
- 주변 상황을 판단한다.
- 차량을 제어한다.
자율주행으로 인한 사회적 혜택
- 일렬 주행 : 운전수 부족 문제 해결
- last one mile 자동주행 : 마트갈 때 입구까지만 운전하고, 주차는 알아서
- dead man system : 운전 중 급한 컨디션 악화에 대응 가능
- 자동 운전 : 서투른 운전능력 보완, 도심 주차 보조
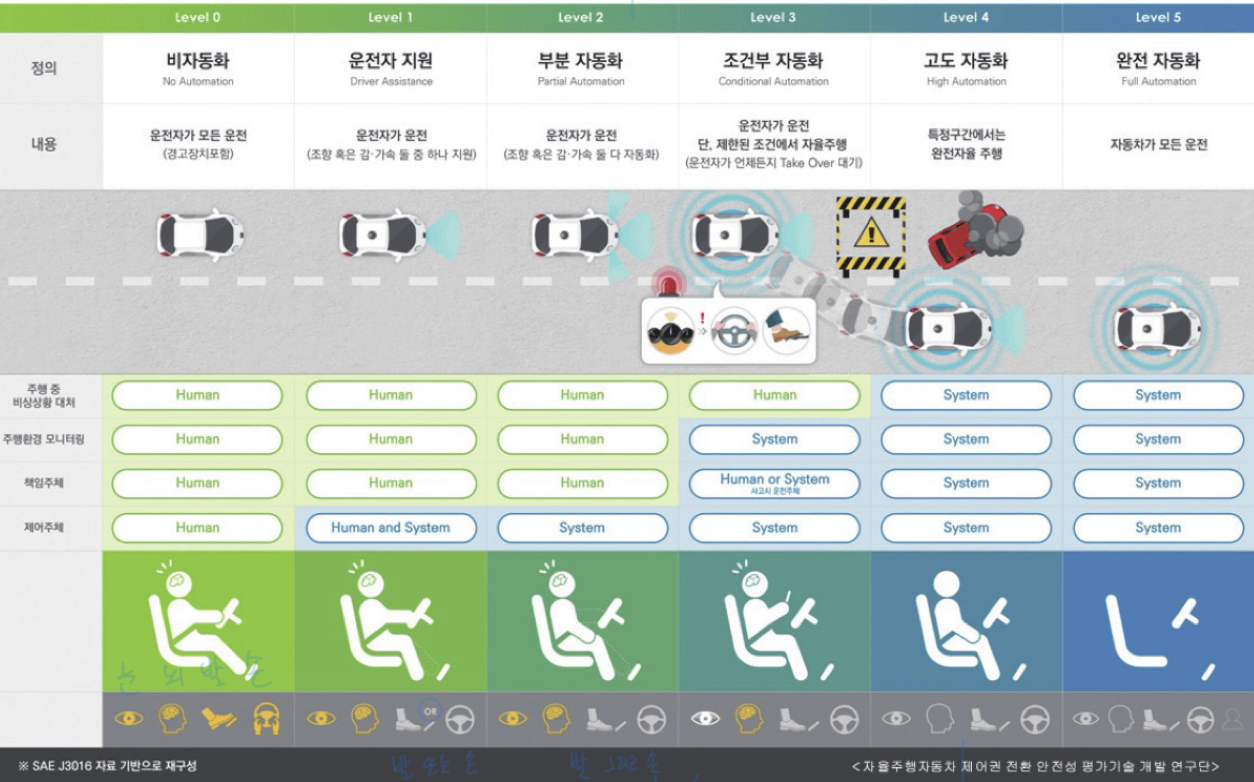
자율주행자동차 기술 6단계
-
NHTSA에 의해 초기에 5단계로 나눴지만, 지금은 없어졌다.
-
SAE(미국자동차공학회)에서 자율주행자동차 기술을 6단계로 나눴다.
-
(눈, 뇌, 발, 손) 관점의 단계 구분
-
Level 0: (눈, 뇌, 발, 손) 사용하여 운전한다. -
Level 1: (눈, 뇌, 발 or 손) 사용하여 운전한다 -
Level 2: (눈, 뇌)를 사용하여 운전한다.
➡️ 요즘의 차들은 Level 2에 해당한다.
➡️ 사고시, 운전자 책임 (공식적 정의는 아니지만 engineer끼리 분류)
(Level 2와 Level3의 차이가 가장 심하다 ➡️ 사고시 운전자책임? 회사책임?)
-
Level 3: (뇌)는 깨어있어야 한다.
➡️ 운전자가 운전하지만 제한된 조건에서 자율주행(운전자가 언제든지 Take Over 대기)
➡️ 사고시, 회사 책임 (공식적 정의는 아니지만 engineer끼리 분류) -
Level 4: 모든 운전이 자동이지만, 아주 예외적인 상황에는 개입해야 하기 때문에 차량에 운전자가 탑승한다. -
Level 5: 모든 운전이 자동이다. 차량에 운전자가 없다.
-
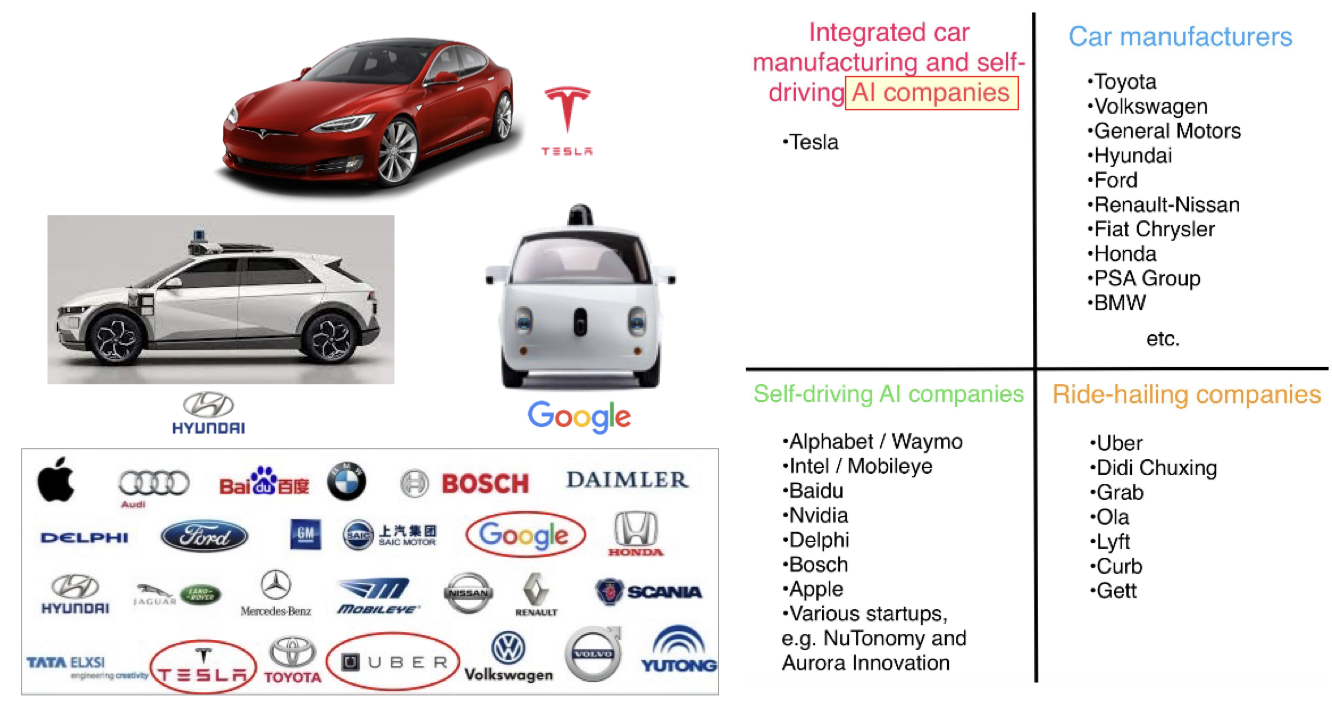
자율주행차 대기업
- Tesla
- Google의 Waymo
- Intel의 MobilEye (이스라엘 대학교 연구실 Mobileye를 Intel이 인수)

DARPA & Stanley
DARPA:
DARPA는 과학기술 발전을 통해 국방력을 유지하고 향상시키는 것을 목표로 하는 미국 국방부 하위 기관.
DARPA는 2004년에 'Grand Challenge'라는 로봇 자율주행 대회를 개최.
Stanley는 그 중에서도 2005년 대회에서 우승한 `스탠포드 대학교의 자율주행 차량이다.
현대모비스의 자율주행자동차 구성
- 현대자동차의 자율주행자동차 구성은 다음과 같다.
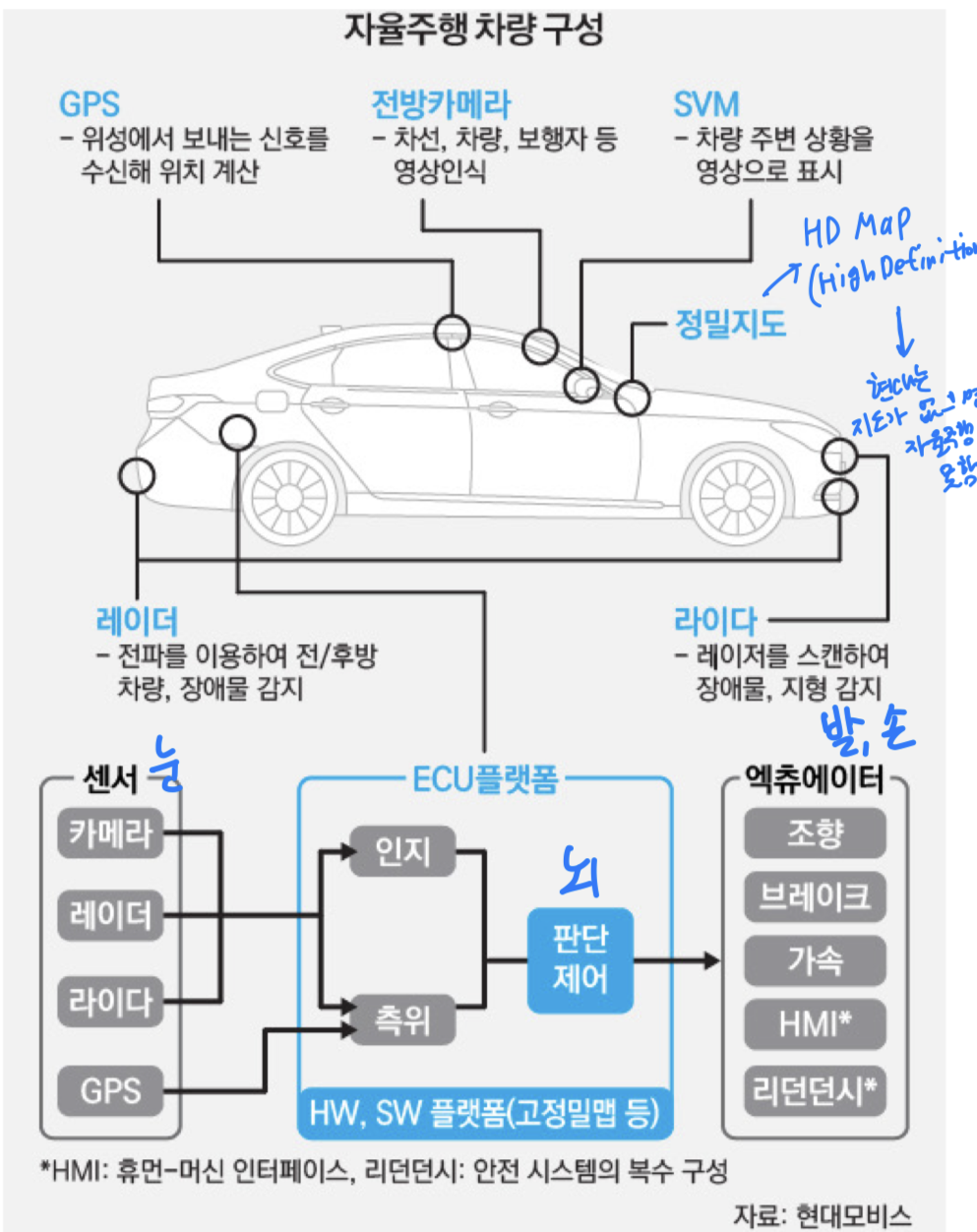
- 현대는 HD(High Definition) Map이 없으면 자율주행을 못하도록 개발되어 있다.
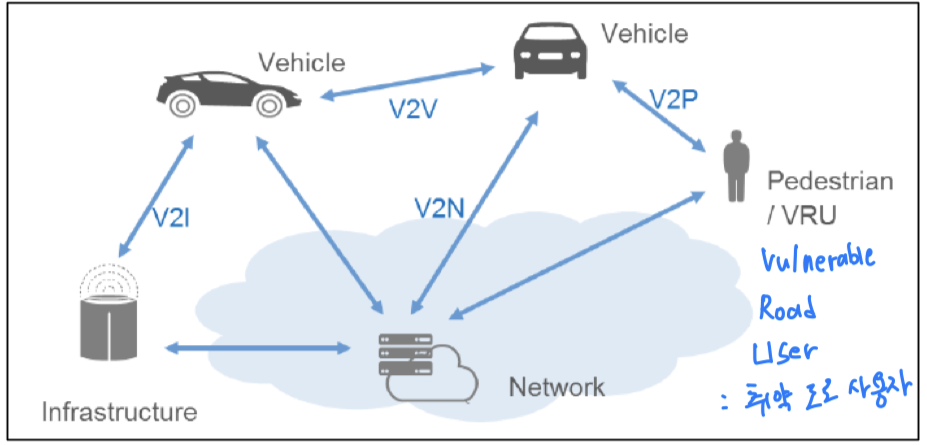
V2X
-
V2X: Vehicle To Everything == 차량과 주변 모든 것들과의 통신- 예를 들어,
신호등과 연관된 V2X를 통해 초록불인지? 빨간불인지? 언제 초록불로 바뀔지? 라는 정보를 통해 차량이 정지할지 말지 등을 정할 수 있다.
특히 해가 지거나 뜨거나, 비가 많이 와서 sensing이 잘 안될 때,
통신으로 뿌려줄 때 도움이 잘 될 것이다.
하지만 자율 주행이 외부에 의존적으로 바뀌게 된다.
(Tesla는 외부 요인에 의존하지 않을 기술을 갖고 있다.)
- 예를 들어,
-
V2X의 유형은 다음과 같다.
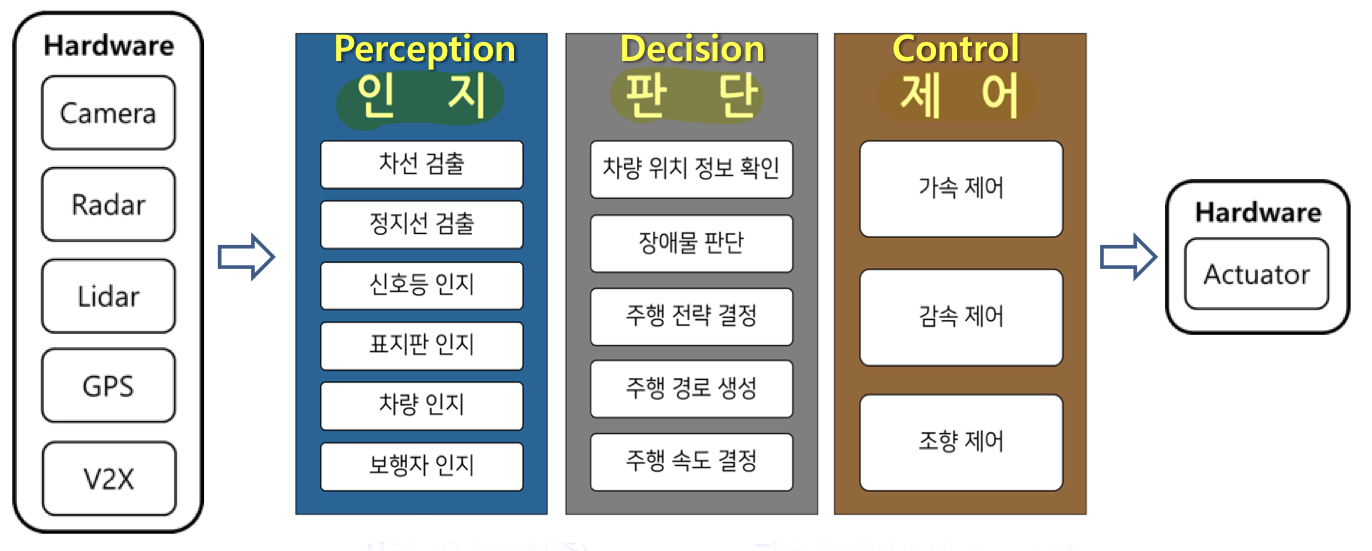
자율주행자동차란 무엇인가?
-
운전자의 개입없이 스스로 주변환경을
인지(Perception)하고,
주행상황을판단(Decision)하여
차량을제어(Control)함으로써 주어진 목적지까지 주행하는 자동차
-
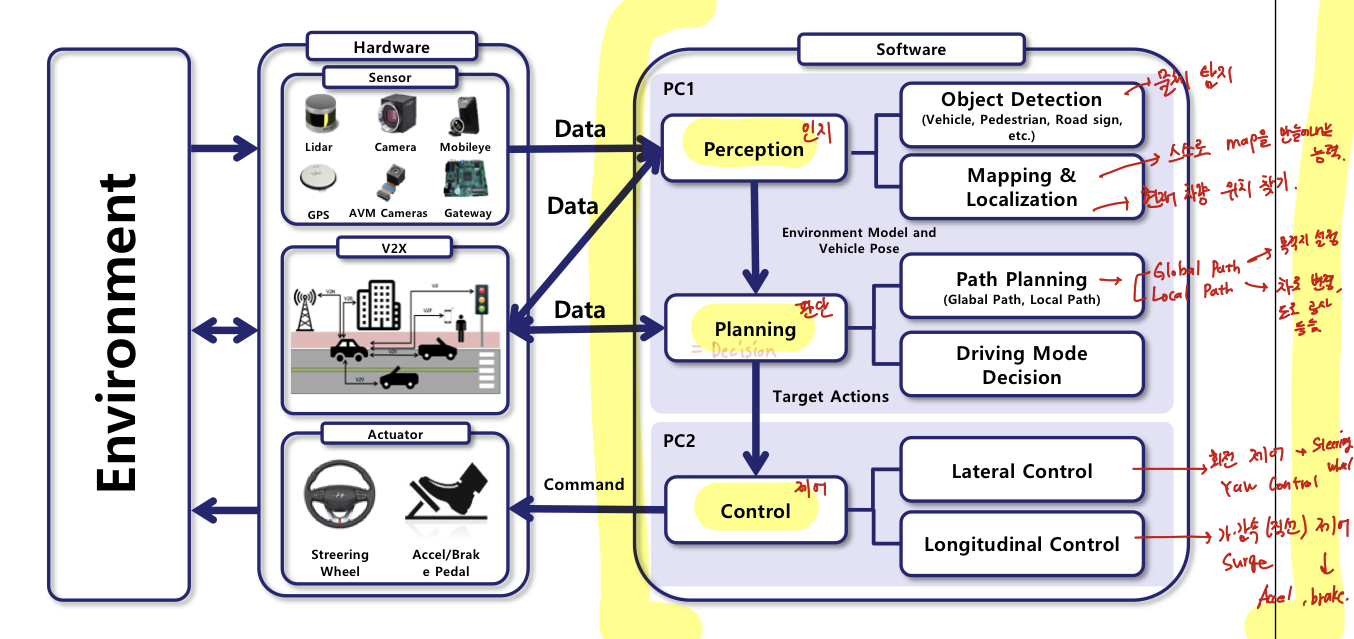
자율주행 알고리즘 개요도
-
Perception- Object Detection : 차량, 보행자, 교통신호 등 물체 탐지
- Mapping & Localization: 현재 차량 위치를 찾아 기본적으로 HD map에 표시함으로써 스스로 map을 만들어가는 능력
-
Decision- Path Planning(Global Path) : 목적지까지 최단 경로 판단
- Path Planning(Local Path) : 차로 변경, 도로 공사 피하기 등 짧은 거리에 대한 최단 경로 판단
- Driving Mode Decision
-
Control- Lateral Control : 회전 제어 (Steering wheel) ➡️ Yaw motion Contorl
- Longitudinal Control : 직선 제어 (Accel, Brake) ➡️ Surge motion Control
LiDAR 기반 자율주행
- 기본적 주행 알고리즘으로
HD Map과LiDAR Sensor에 의존한 주행 메커니즘. - 지도가 준비되지 않은 지역과 날씨 변화(비, 눈, 안개)와 같은 상황으로 인해
➡️ Sensor의 인식 환경 악화시 주행 불가.
➡️ AI 역량에 기반한 능동 주행 역량 부족
➡️ 높인 비용과 낮은 확정성(상용화 가능성 문제)
등의 어려운 점이 있다.
눈에 집중하여 자율주행 개발
Virtual LiDAR
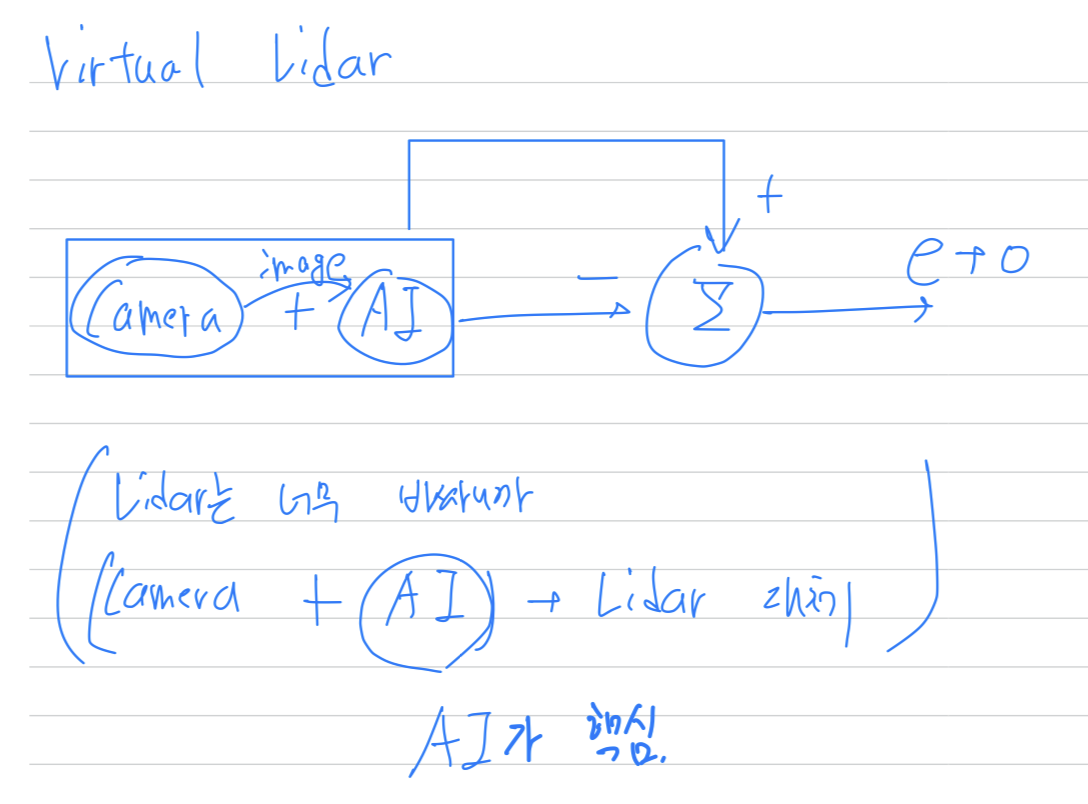
Camera 기반 자율주행
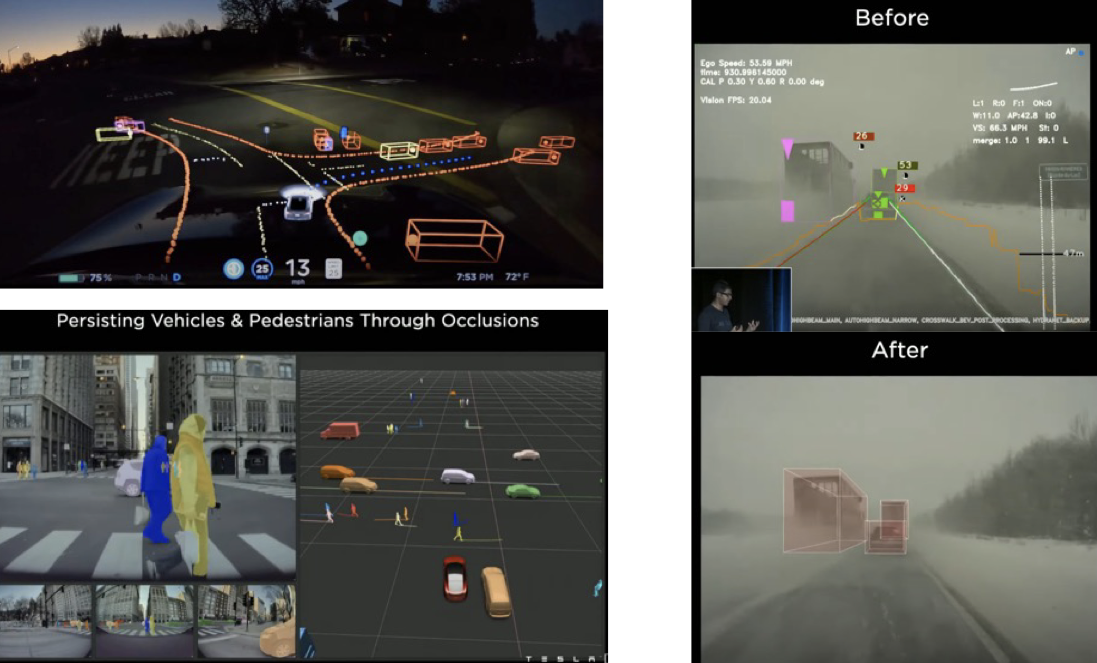
- Tesla는 8개의 Camera를 통해 다각도 촬영 이미지를 통해 3차원 공간을 구현한다.
8개의 Camera를 통해 Virtual LiDAR로 사용한다. LiDAR는 비, 눈이 오면 Sensing이 잘 안되지만
Tesla는 비, 눈 영상을 학습시켜 Camera로 극복. (Virtual LiDAR)- Tesla는 8개 Camera의 다각도 촬영 이미지를 통한 3차원 공간 구현
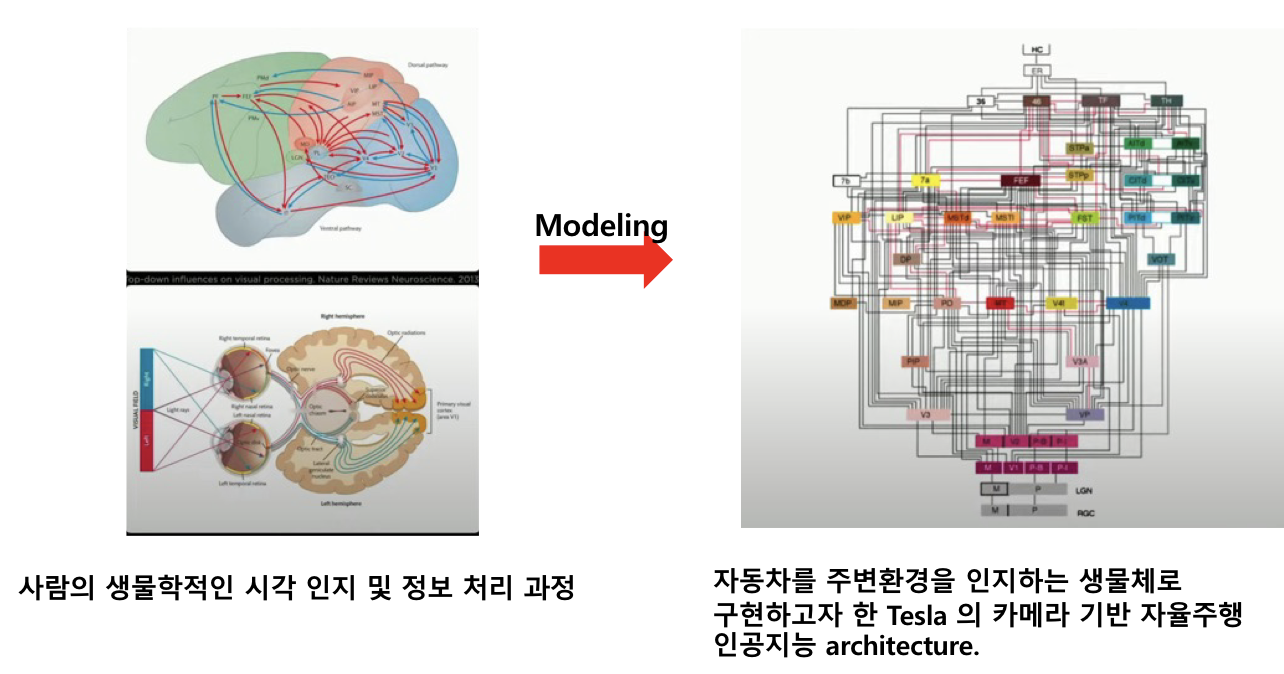
Tesla는 뇌에 집중하여 자율주행 개발
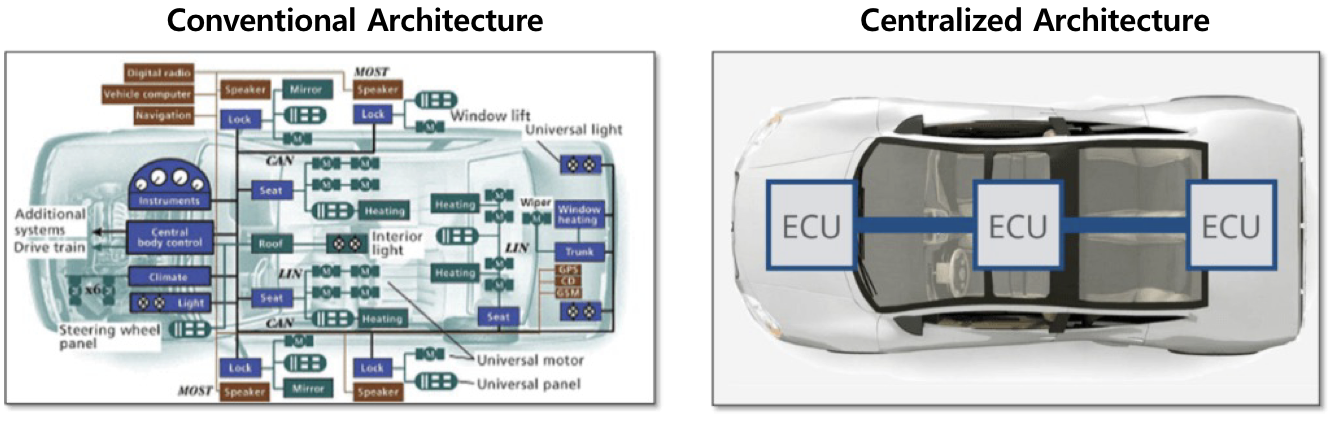
자율주행자동차 통합 ECU
- 자율주행을 위해서는 더 많고 복잡해진 차량 제어를 필요로 함.
- 기존의 architecture는 수백 개의 ECU를 관리하기 위한 수백 개의 SW가 독립적으로
구동되어야 함.
➡️ Centralized Architecture(integrated ECU)로의 전환 필요.
전기자동차
전기자동차 플랫폼
- 전기를 동력으로 사용, 배터리에 축적된 전기로 하나 이상의 모터를 회전
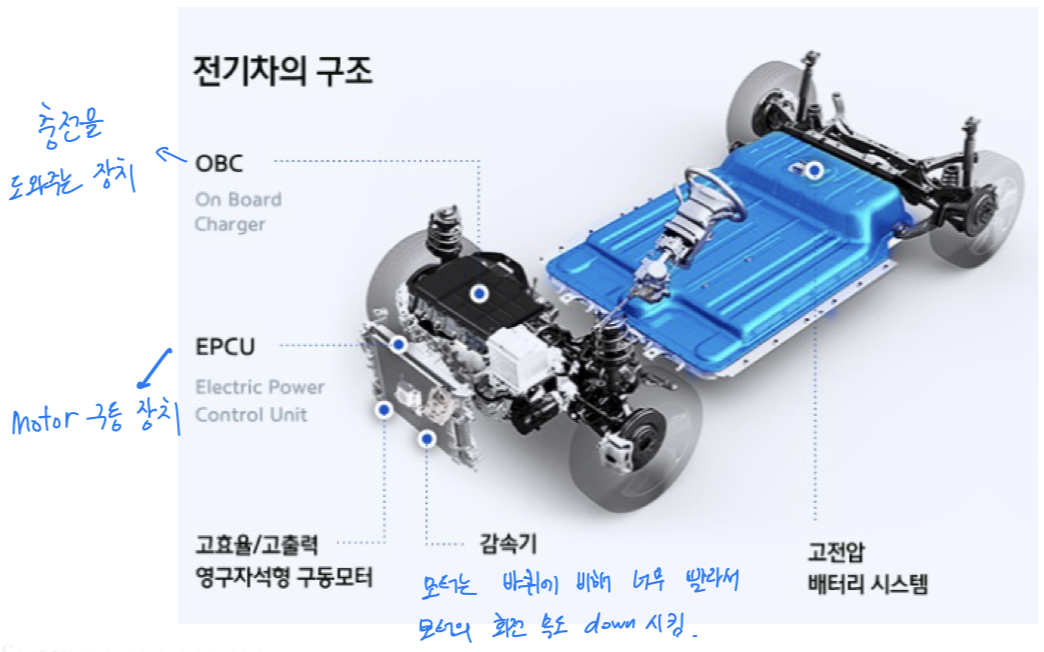
전기자동차 핵심 기술
- DC인 HV Battery를 Inverter(DC ➡️ AC)를 통해 Motor에 AC로 전달해줌.
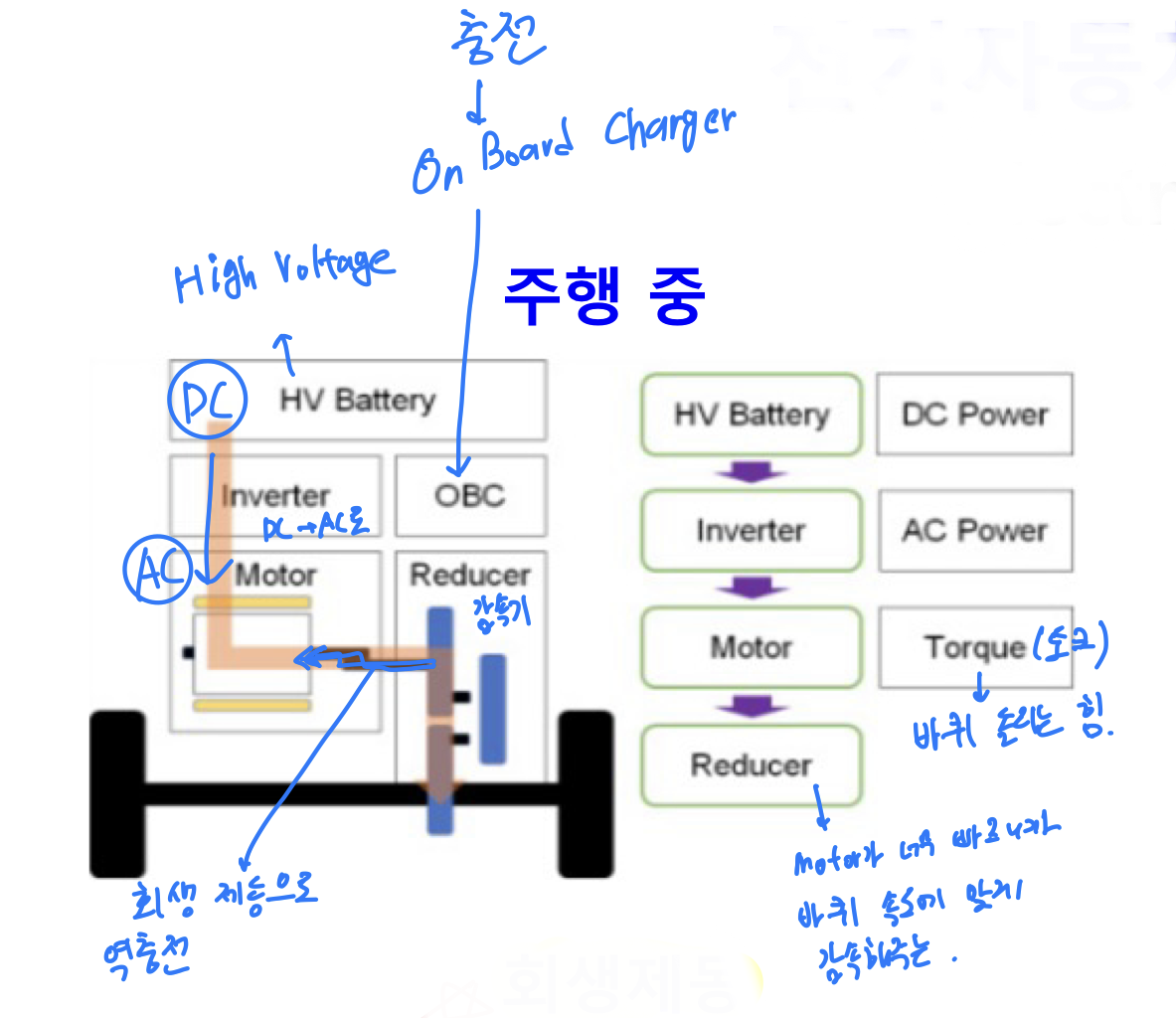
전기자동차 특징
전기차 고유의 발진 가속:
전기모터 특유의 우수한 초기 발진 토크로 제로백이 좋다.회생 제동:
브레이크를 밟으면 모터가 발전기로 전환되어 반대로 배터리가 충전되는 기능으로
특히 제동 횟수가 높은 도심에서 주행 효율성(연비)을 높여준다.급속충전:
24 ~ 33분 내외의 짧은 기간에 급속 충전이 가능하다.완속충전 상태에서의 예냉 / 예열:
충전기 플러그인 상태에서 공조장치를 미리 가동시키면 쾌적한 상태로 드라이빙이 가능하다.
