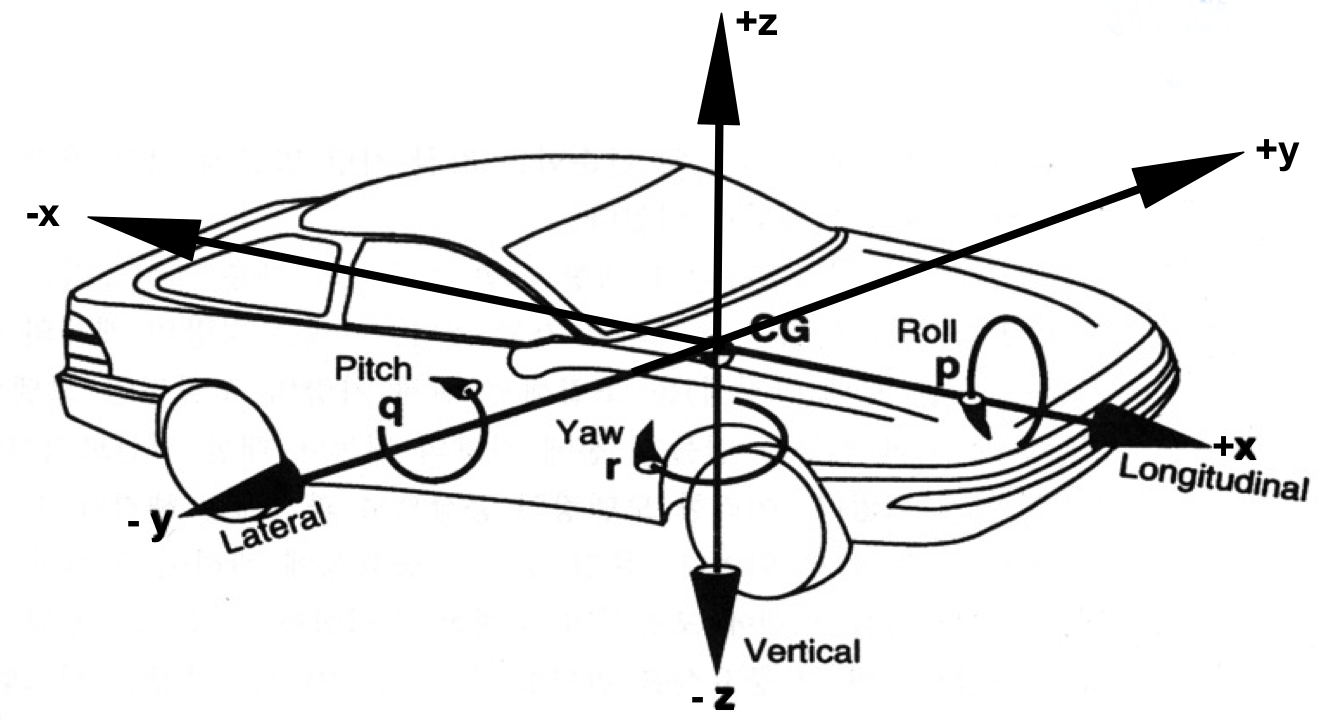
6 DOF
Longitudinal: Acceleration / Deceleration (종방향 제어)
➡️ : 가속도Lateral: Handling, Maneuvering Stability (횡방향 제어)
➡️Vertical: Ride
➡️ : Tire Pressure, Suspension
위의 (종방향), (횡방향), 에 대한 제어까지 더욱 해결되어야
진정한 자율주행이 될 수 있을 것이다.
➡️Autonomous Ride Quality Control (ARQC)
차량의 치수
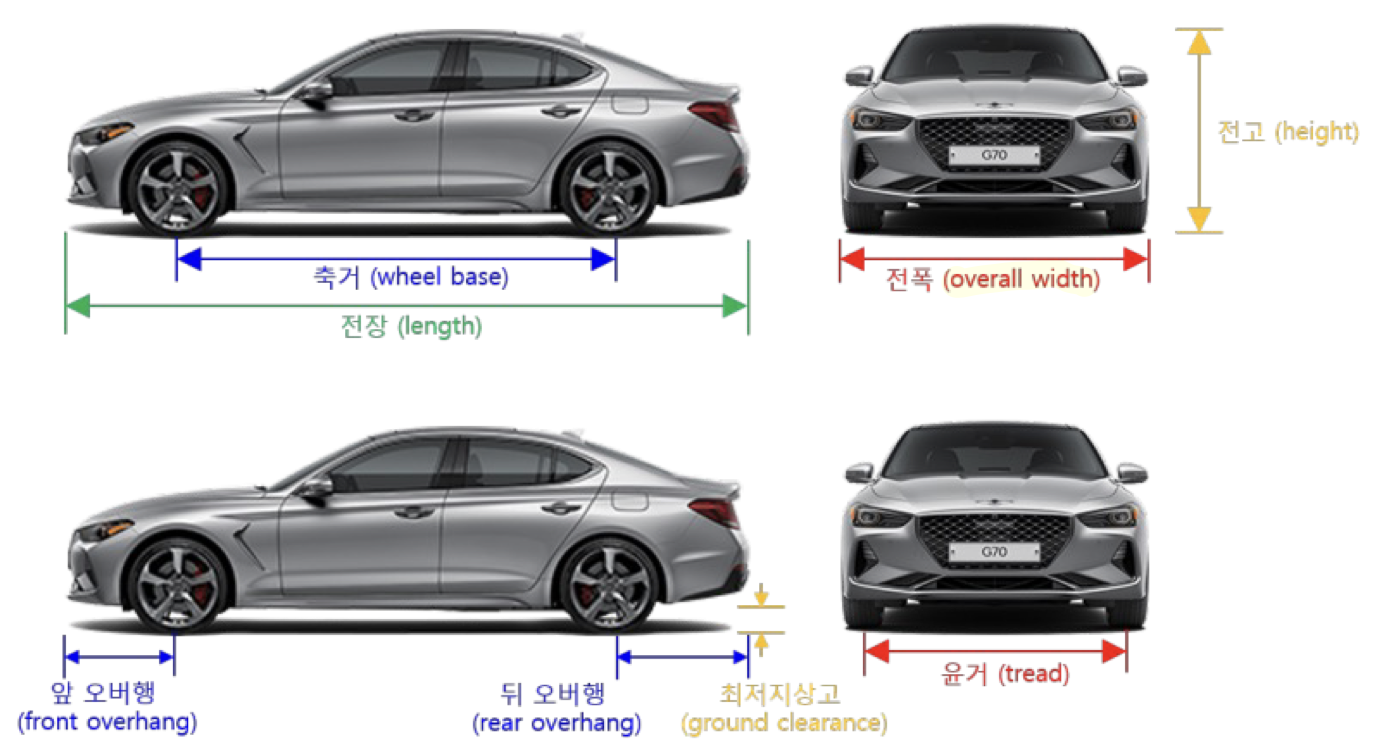
축거 (Wheel Base)- 전륜 후륜의 중심간 수평거리
- 축거가 길면, 승차감 향상, 회전반경 커짐
Front Overhang: 전륜으로부터 앞으로 튀어나간 길이Rear Overhang: 후륜으로부터 앞으로 튀어나간 길이전장(Length == Overall Length)- Overall Length = Wheel Base + Front Overhang + Rear Overhang
윤거(Tread): 좌우 타이어 접지면의 중심간 수평거리전폭 (Overall Width)전고 (Height == Overall Height)최저지상고 (Ground Clearance)
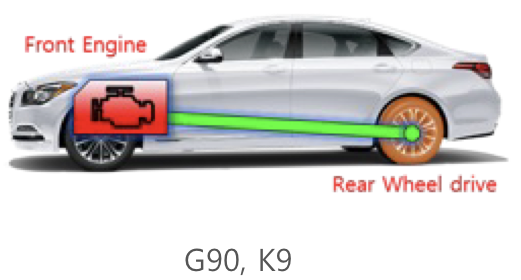
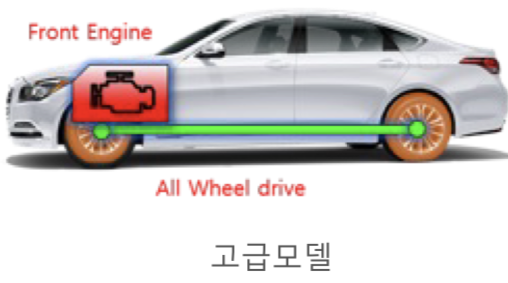
차량의 구동방식
-
FF 전륜구동: Front engine - Front wheel drive

-
FR 후륜구동: Front engine - Rear wheel drive
-
AWD 4륜구동: All Wheel Drive
-
RR: Rear engine - Rear wheel drive

-
MR: Mid engine - Rear wheel drive

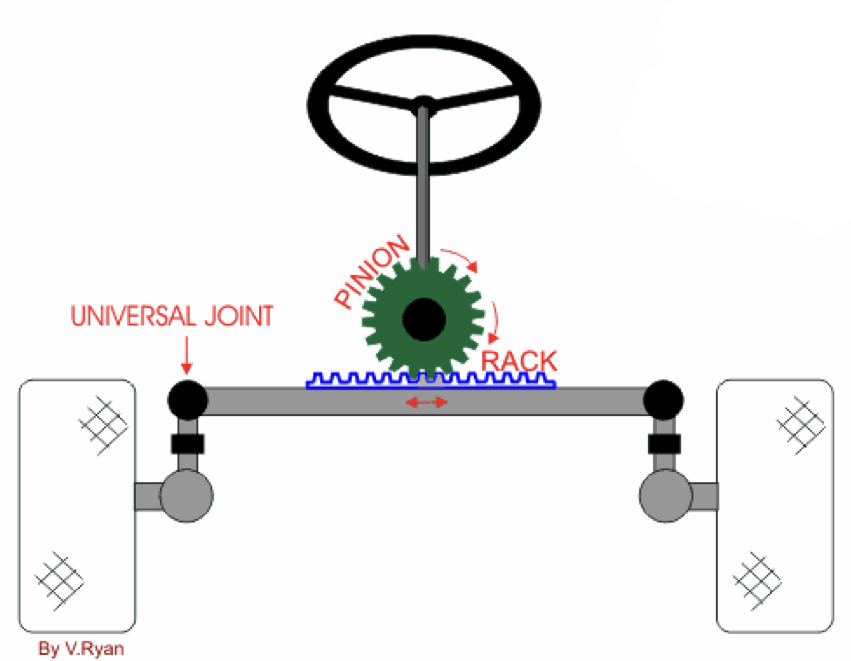
Steering System
Steering System (조향장치): 차량의 횡방향 조종 장치
Rack & Pinion이 Steering Wheel의 회전운동을 직선운동으로 전환
MDPS == EPS
MDPS : Motor Driven Power Steering
EPS : Electric Power Steering
MDPS == EPS- Encoder가 달려 있어서 작은 힘으로 motor가 구동되어 운전대가 잘 돌아가도록 한다.
- 운전자의 Steering Wheel 의지(방향, 크기, 속도 등)를 감지하여 보조
-
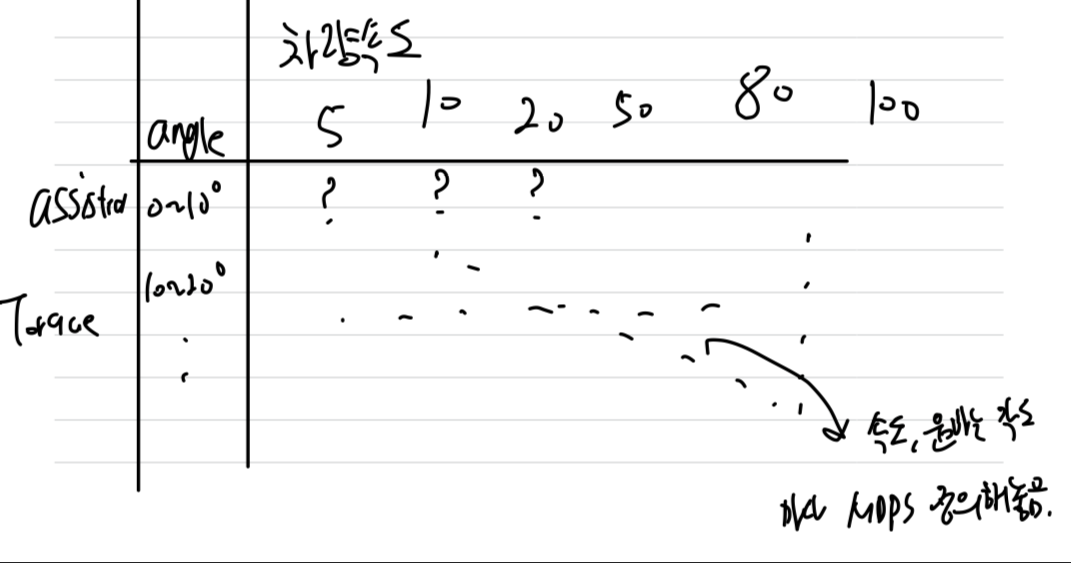
Steering Effort(운전자의 torque) = Load Torque(요구되는 torque) - Assisted Torque(MDPS 발생 torque)
- 차의 속도가 빠르면, 양력이 높아짐. 따라서 Assisted Torque를 감소시킴.
- 따라서 차량의 속도 별로 Assisted Torque를 정의해놓은 Lookup Table이 존재한다.
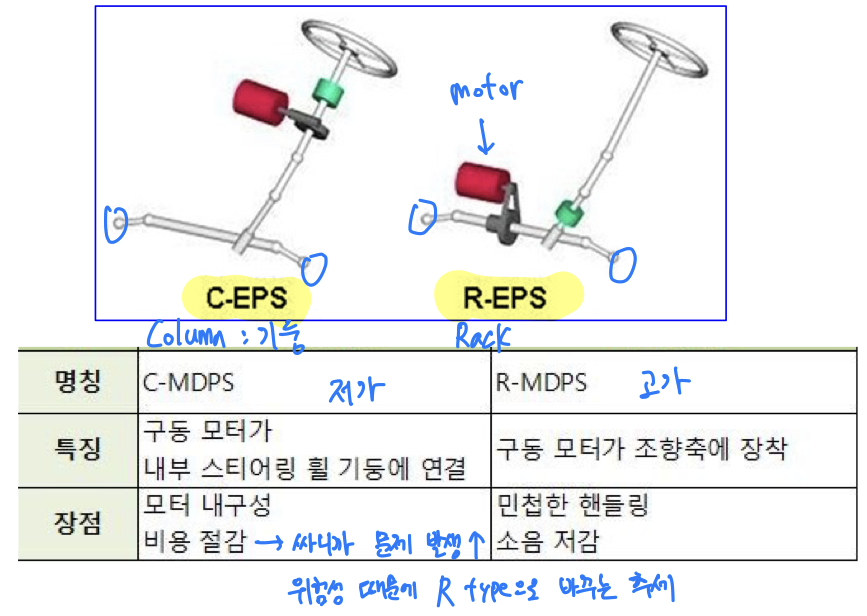
C-MDPS & R-MDPS
C-MDPS: Column(기둥)에 Motor가 붙어있는 MDPS TypeR-MDPS: Rack에 Motor가 붙어있는 MDPS Type
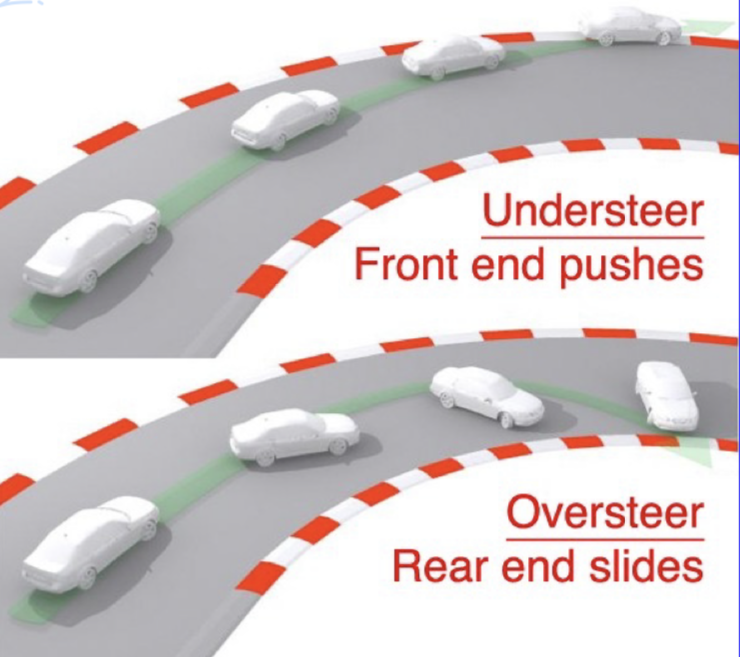
Understeer & Oversteer
-
바퀴, C-MDPS Type 등의 문제로 Steering에 문제가 발생하는 상황.
-
Under Steer: 제대로 못 꺾임 -
Over Steer: 많이 꺾임
-
: 원심력
➡️ corner에서 v(속도)를 줄이는게 가장 안전하다.
ESP(Electronic Stability Program)
ESP: Electronic Stability Program.
차량의 주행 조건 및 노면의 상태에 따라 4륜과 엔진 제어를 통해
운전자의 차량 주행방향 이탈 또는 눈길 또는 차량 선회 시 긴급 제동 상황에서
주행 방향을 자동으로 제어하고 차량의 제어를 안정적으로 유지시켜 주어 차량의 안정성을 향상시켜 주는 기술
➡️ IMU Sensor를 통해 읽어서 ESP 기술 가능.
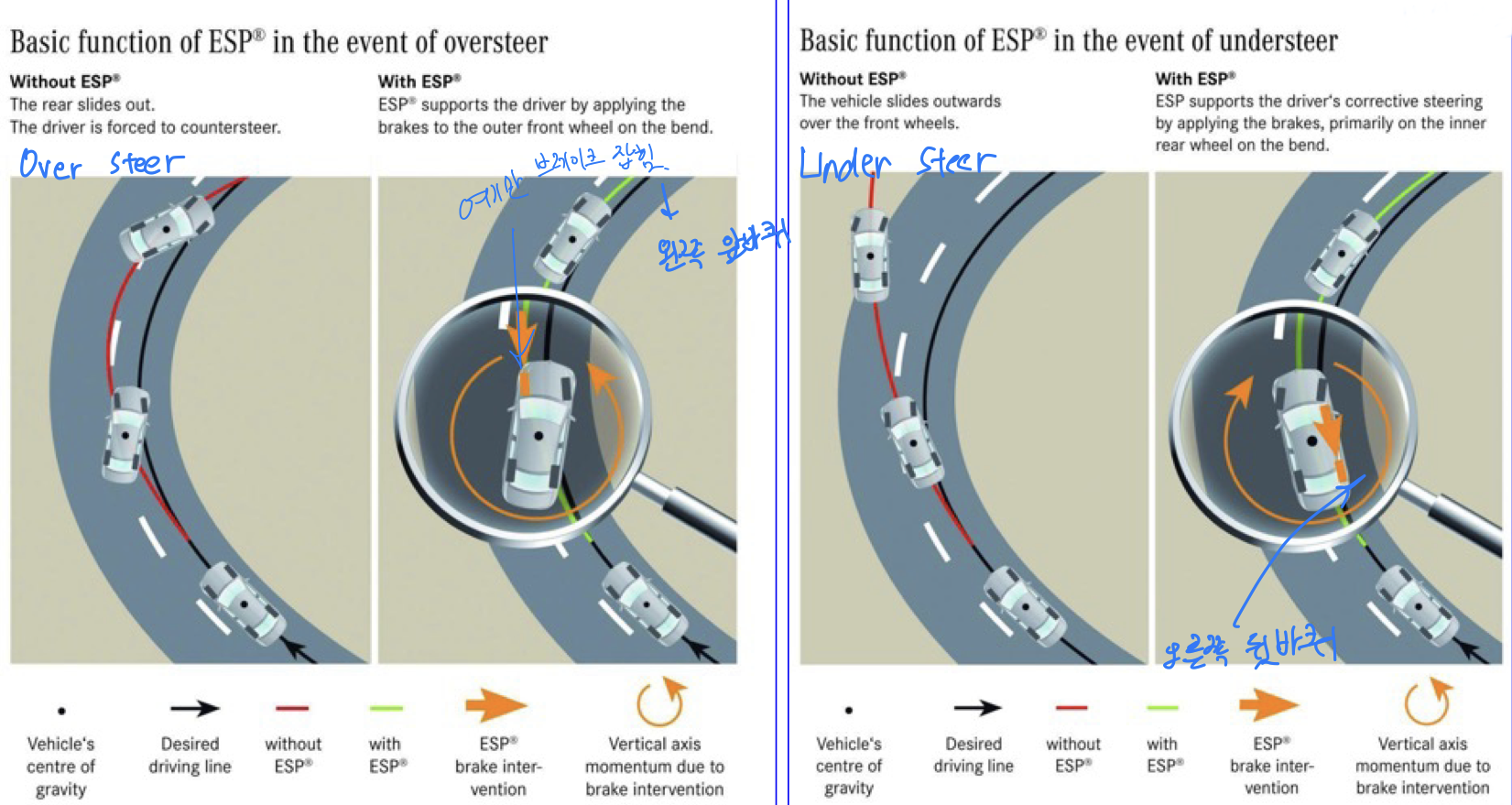
- 우회전 Over Steer 상황에서 왼쪽 앞바퀴에 브레이크를 잡아줌으로써 Over Steer 극복하도록
- 우회전 Under Steer 상황에서 오른쪽 뒷바퀴에 브레이크를 잡아줌으로써 Under Steer 극복하록
Steady-State Cornering
Steady-State Cornering(정상상태 선회): 속도 일정, 각도 일정한 상태에서 Cornering- steaty-state에서의 선회 성능의 척도 : Understeer gradient
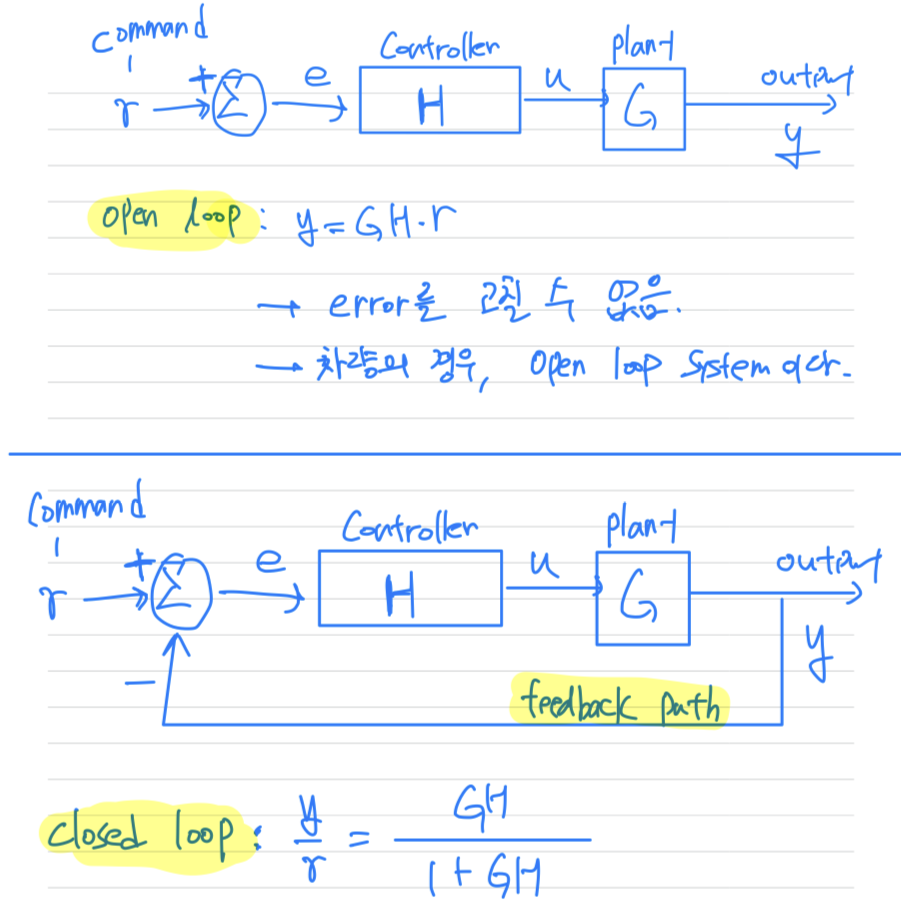
- 차량 자체의 특성 : Open-Loop System
Low-Speed Turning
- Steady-State Cornering에서 Low-Speed Turning을 대입.
Low-Speed Turning을 고려하는 이유- 고속으로 선회하면, slip(미끄러짐)이 발생하기 때문.
- slip이 발생하면, 바퀴가 회전한만큼()의 거리가 가지지 않는다.
- 저속으로 선회하면, slip현상이 발생하지 않기 때문에 정확히 바퀴가 회전한만큼 거리의 이동이 발생한다.
Ackerman Geometry & off-tracking distnace
L : wheel base
t : track (윤거)
R : Turning radius
➡️ Ackerman Angle : L, t, R이 주어진 상황에서 선회 시의 평균 Steering Angle
➡️ off-tracking distnace : 앞바퀴의 회전 궤적과 뒷바퀴의 회전궤적 차이로서 발생
Ackerman Angle()과off-tracking distance(후륜의 이탈궤적)() 다음과 같이 유도한다.
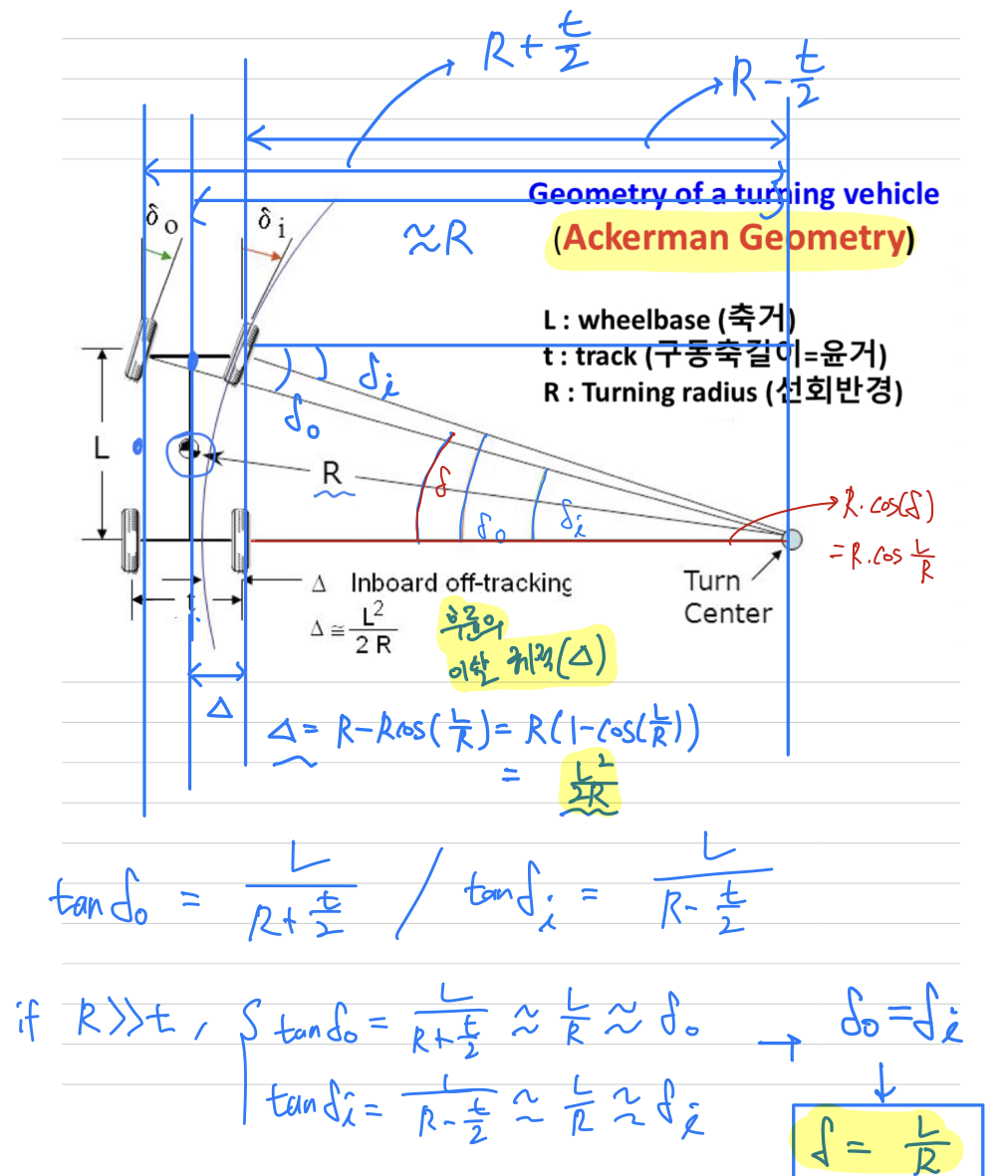
Ackerman Angle:off-tracking distacne:
➡️ 특히 wheelbase(L)이 큰 버스, 트럭에서 중요.
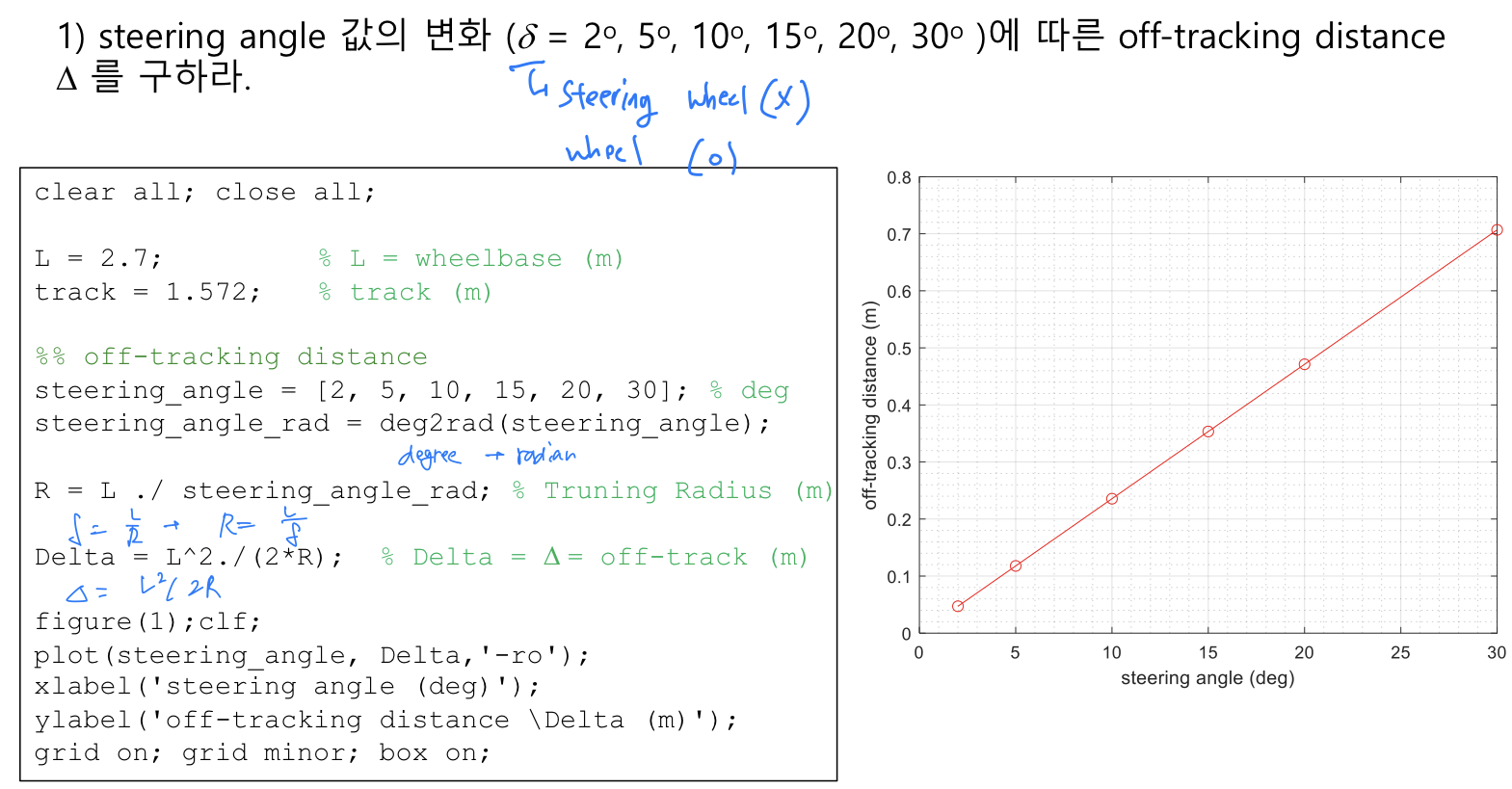
Problem
실습 Github
-
https://github.com/LeeHyungSeop/3-1_SensorAndActuator/tree/main/10weekth_Tracking
-
실습 내용 : 운전면허 시험 굴절코스 빠져나가는 simulation
(ankerman angle & off-tracking distance 고려)
https://github.com/LeeHyungSeop/3-1_SensorAndActuator/tree/main/HW_02
