위치/변위 센서
포텐쇼미터 (potentiometer)
포텐쇼미터(potentiometer) : 변위를 직접 전기저항의 변화로 변환하고, 부가회로에 의해서 이 저항 변화를 전압 또는 전류 변화로 다시 변환하는 센서.
즉, 가변 저항기.
직선변위 검출용 포텐쇼미터
-
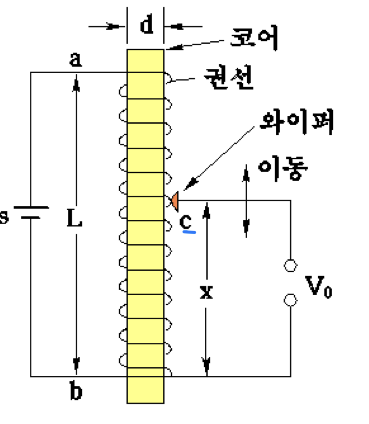
다음의 그림은 직선변위 검출용 포텐쇼미터이다.
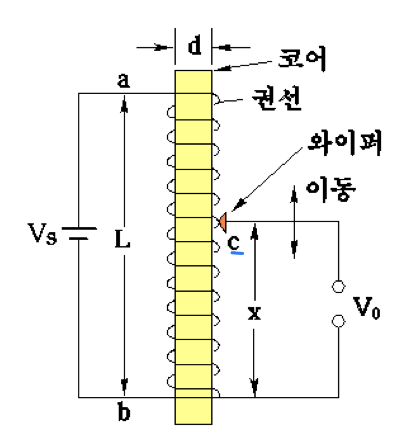
- : 권선의 양단 간의 전압(Source)
- 와이퍼 : 권선에 따라서 움직인다.
- : a지점에서 b지점방향으로 이동한 지점
- : a지점과 b지점 사이의 전기 저항값
: c지점과 b지점 사이의 전기 저항값
: a에서 b방향으로 이동한 지점 - : 출력 전압. (저항값을 이용해서 몇 mm 이동했는지 알 수 있다.)
➡️ 변위에 비례하는 출력전압이 얻어진다.
회전변위 검출용 포텐쇼미터
- 다음의 그림은 회전변위 검출용 포텐쇼미터이다.
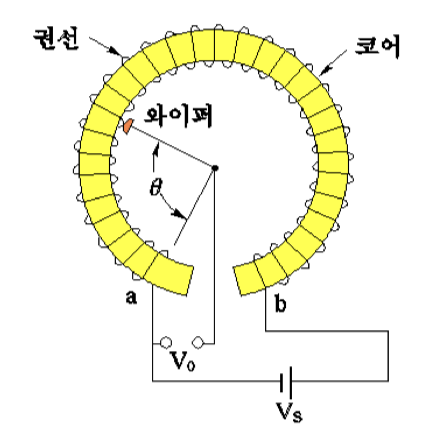
➡️ 회전각 에 비례하는 출력전압이 얻어진다.
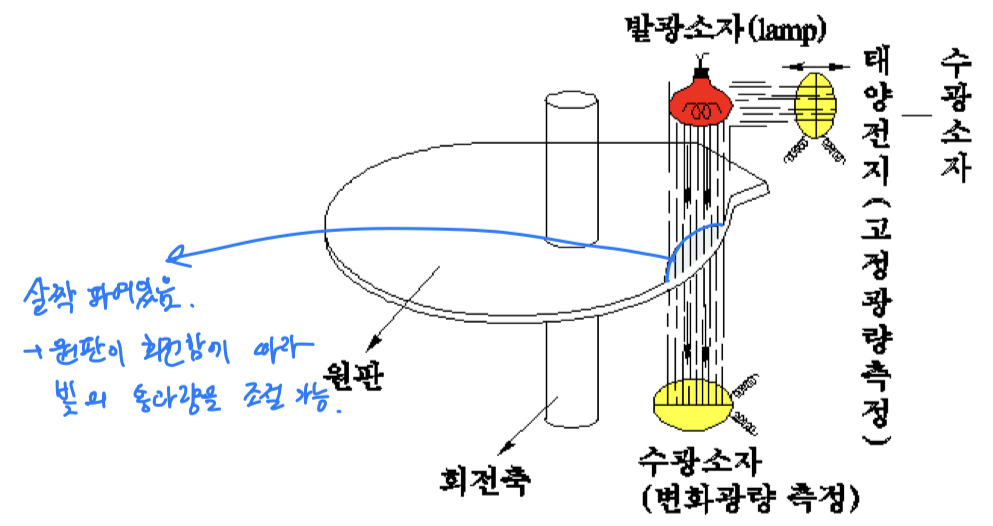
광학식 포텐쇼미터
- 축의 각도와 원판의 회전에 따라 광센서가 받는 광량이 변하도록 설계된 기구를 이용.
(현재 이 방식은 많이 사용하지 않는다.)
로터리 인코더(Rotary Encoder)
-
로터리 인코더(rotary encoder): 회전각을 전기 펄스로 변환하여 출력하는 디지털식 회전위치(변위) 검출기.
즉, 회전각도 정보를 감지하는 센서. -
출력방식에 따라 다음과 같이 분류한다.
- 증가형 인코더(Incremental Optical Encoder) : 펄스 수로 나타냄
- 절대치형 인코더(Absolute Encoder) : 절대값으로 나타냄
증가형 인코더 (Incremental Optical Encoder)
-
증가형 인코더의 구조는 다음과 같다.
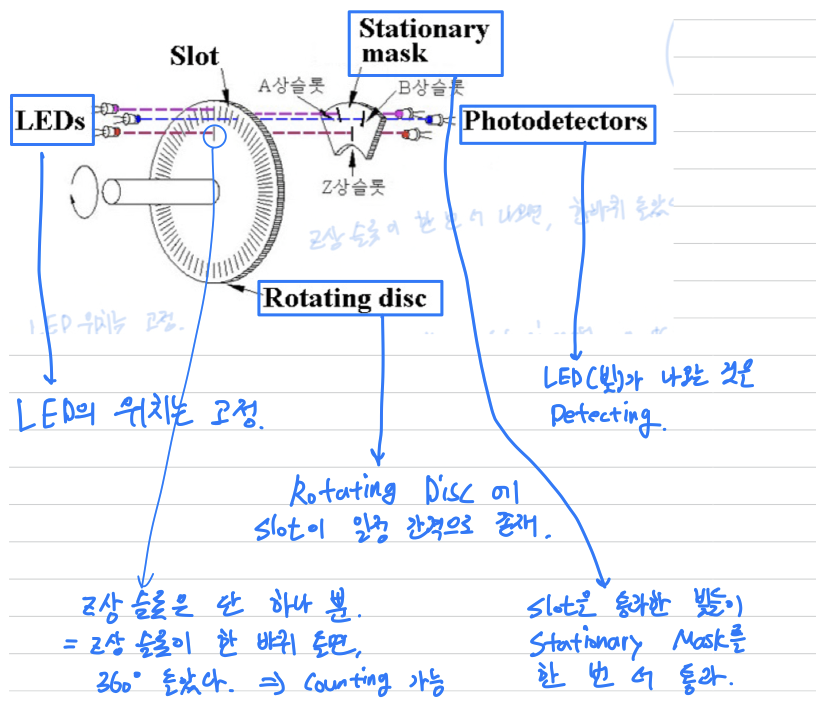
- LED는 고정된 위치에서 빛을 쏘고 있다.
- Rotationg Disc는 회전하며 일정한 간격으로 있는 Slot에 LED가 통과한다.
(Z상 슬롯은 단 하나 밖에 없다. 그래서 Z상 슬롯이 한 바퀴 돌아서 찍히면, Disc 는 360도 회전한 것이다.) - Disc를 거치며 통과된 LED들이 Stationary Mask를 최종적으로 거친다.
- Stationary Mask에서 최종적으로 거쳐진 LED들은 Photodetector에 의해 detecting된다.
-
A상과 B상의 위상 차로부터
축의 정회전(시계 방향, Clockwise)과 역회전(반시계 방향, Counterclockwise) 정보를 얻을 수 있다.- Disc가
시계방향(CW)으로 회전하면,
B상 상승시점에서 A상은 "1"이 된다. - Disc가
반시계 방향(CCW)으로 회전하면,
B상 상승시점에서 A상은 "0"이 된다. Z상은 1회전에 1개의원점신호를 발생시킨다.
따라서 주로 카운터의 리셋 또는 기계적 원점 위치 검출에 이용된다.
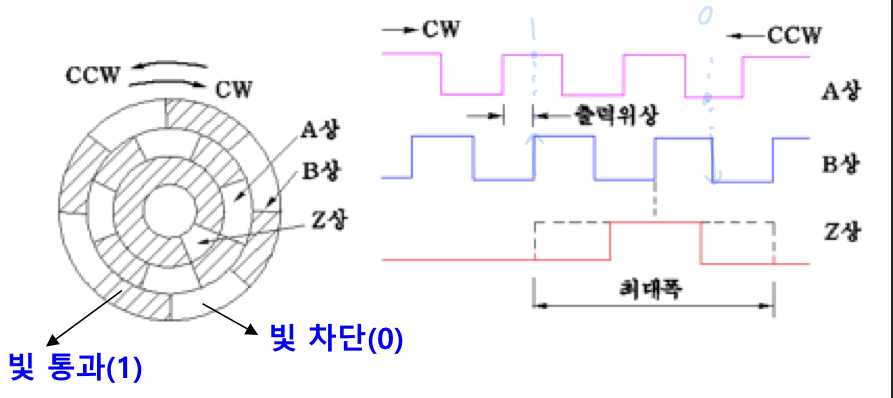
- 위의 그래프에서도 알 수 있듯이,
CW로 회전하면, B상 상승시점에 A상은 1.
CCW로 회전하면, B상 상승시점에 A상은 0.
- Disc가
절대치형 인코더 (Absolute Encoder)
-
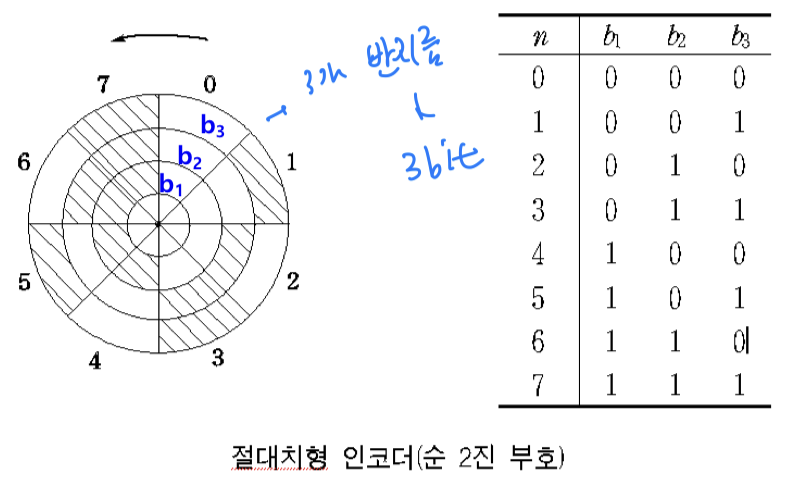
Rotating Disc가 돌지 않고 고정이다. 슬롯에 빛이 들어오면 1, 안들어오면 0.
-
3-bits absolute encoder : 반지름 방향으로 3개의 반지름 존재 ➡️ 3bit와 같다 ➡️ 따라서 원 8등분 -> 한 칸 당 45
-
4-bits absolute encoder도 3-bits와 마찬가지이다.
인코더가 모터에 필요한 이유
- Feedback Control System
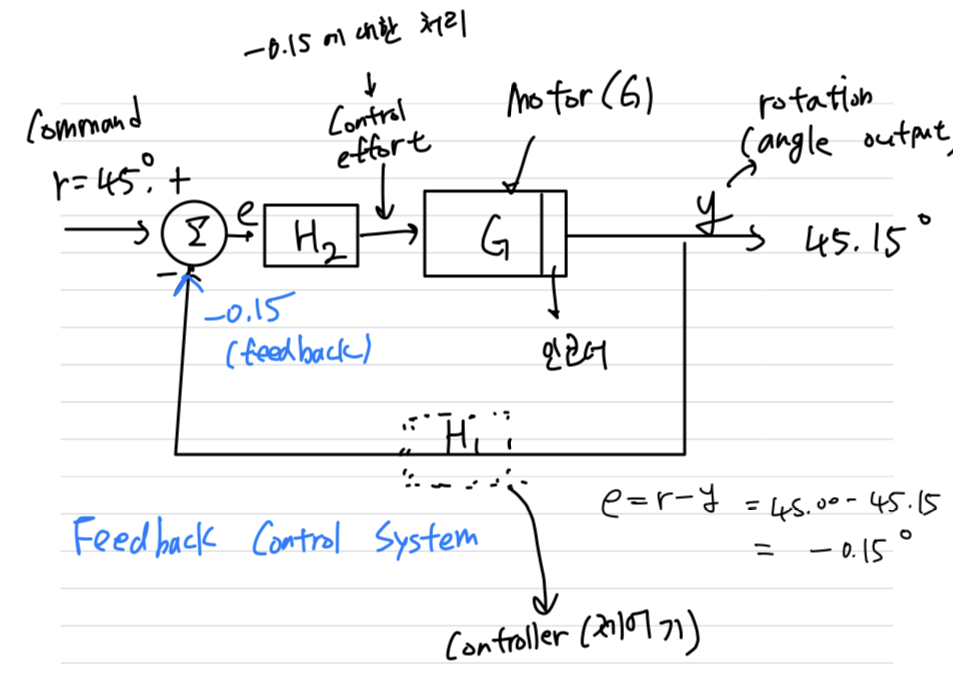
- 45 회전하라는 Command(r) 부여.
➡️ 실제 rotation output(y)으로 45.15 회전.
➡️ error = r - y = -0.15
➡️ -0.15 error 처리를 위한 feedback 전달.
➡️ 제어기2(H2)에서 -0.15에 대한 error 처리(Control Effort)
➡️ 최종 rotation output(y) = 45Feedback Path(Feedback Control System)를 만듦으로써
Closed Loop을 만들기 위해
스스로 오차를 극복할 수 있어야 한다.
그러기 위해서는 모터가 얼만큼 움직였는지 측정할 수 있어야 하고,
이를 인코더로 측정한다.
즉, 모터가 얼만큼 움직였는지를 측정하기 위해 Encoder가 필요하다.
인코더가 없다면 모터를 제어하기 힘들어진다.
- 45 회전하라는 Command(r) 부여.
초전형 이동 검출기
초전현상:열에너지만 있으면 전압을 생성하는 현상.- 초전형 이동 검출기 : 초전현상을 이용해서 사람 또는 물체의 이동을 검출하는
수동적 적외선 이동 검출기 (Passive Infrared Motion Detector) 사람의 이동 검출에 가장 널리 사용.(ex. motor가 달려있는 CCTV, 카메라)
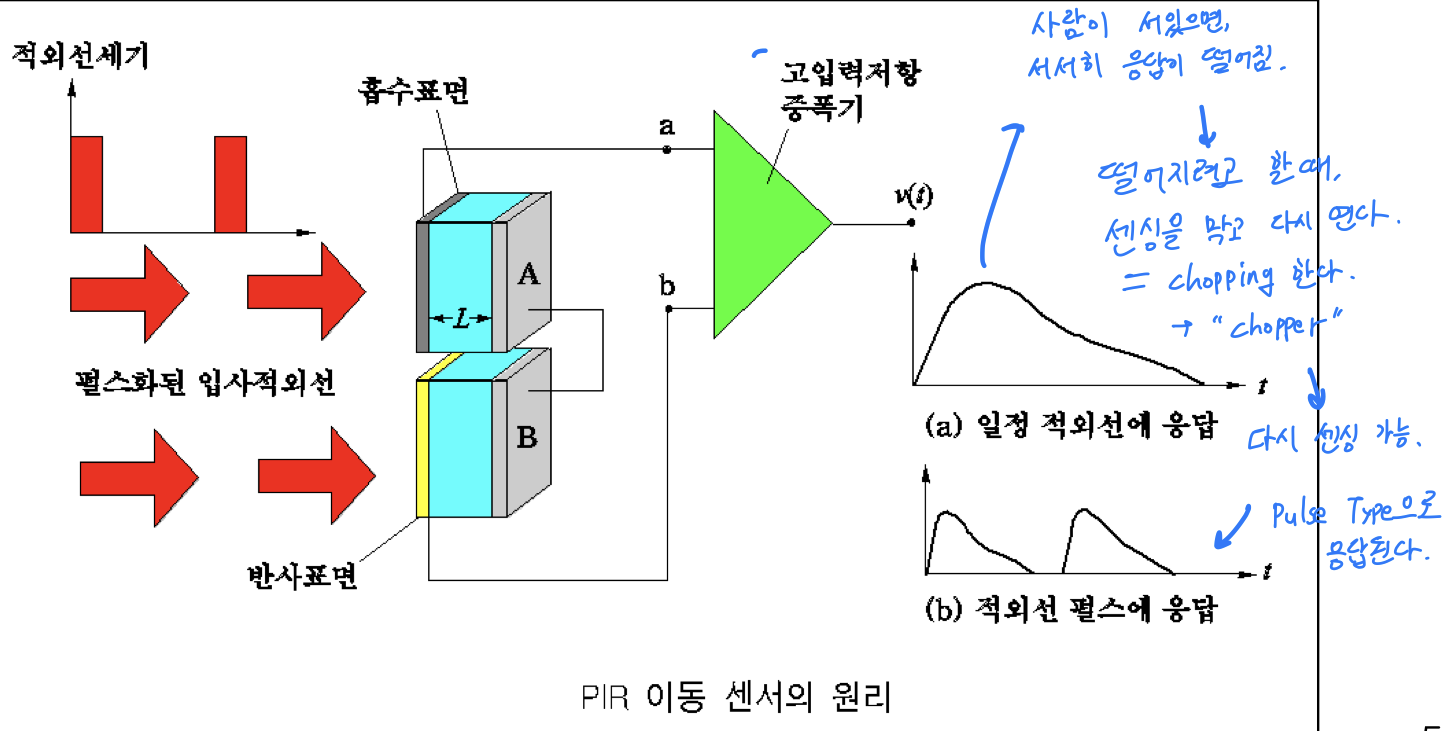
PIR Sensor의 원리
-
PIR Sensor: Passive Infrared Sensor -
PIR Sensor의 특징: 열에너지를 띤 사람이나타나면 센싱한다.
하지만 사람이 가만히 서있는 상태로 시간이 지나면 응답이 서서히 떨어진다.
이를 해결하기 위해 Chopper 사용. -
Chopper: 센싱 응답이 떨어지려할 때, Chopper로 센서를 막고 다시 연다. 이를 반복하여 센싱 기능을 유지시킨다.