초음파 개요
초음파
- 음파는 인간의 귀가 들을 수 있는 가청 주파수(20 ~ 20,000)를 중심으로 다음과 같이 분류한다.
- 초음파 : 20,000[Hz] 이상
- 음파(가청음) : 20 ~ 20,000[Hz]
- 초저주파음(infrasound) : 20[Hz] 이하
주파수, 주기, 파장, 음속
- :
주파수 (frequency), 1초 동안 파장의 cycle수 - :
주기 (period), 한 파장이 전파하는 데 걸리는 시간 - :
파장 (wavelength), 음파의 마루(또는 골)에서 마루(또는 골)까지의 거리 - :
음속 (sound speed), 음파가 1초 동안 전파하는 거리
,
decibel
-
decibel은 상대적인 값을 나타내기 위한 단위이다. -
따라서
decibel을 구하는 식은 다음과 같다.
-
decibel ratio 중에 가장 중요한 ratio가 있다.
이는 바로the power ratio is 1:2
기존 전력에 대한 1/2 전력의 상대적 비율은 다음과 같이 계산한다.
이를 -3 dB frequency라고 부른다.
SPL (Sound Pressure Level)
-
decibel 단위를 이용하여 Sound Pressure Level(SPL)을 계산할 수 있다.
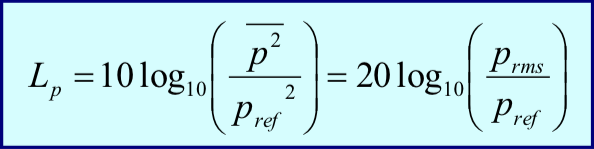
-
Pressure(압력)은 +, - 왔다갔다 하기 때문에, 즉AC 신호이기 때문에
decibel 식에 대입하면 이상한 값이 나온다.
따라서(-) 부호를 없애기 위하여 제곱을 취해서 (+) 부호만 나오도록만든다. -
: 시간 에 따라 바뀌는 압력 의 (Root Mean Square)값이다.
➡️ AC 신호에 대해서 rms를 사용한다.
➡️ mean(평균)이 0으로 간다면, 값이 stand deviation(표준 편차)과 똑같아진다.
= -
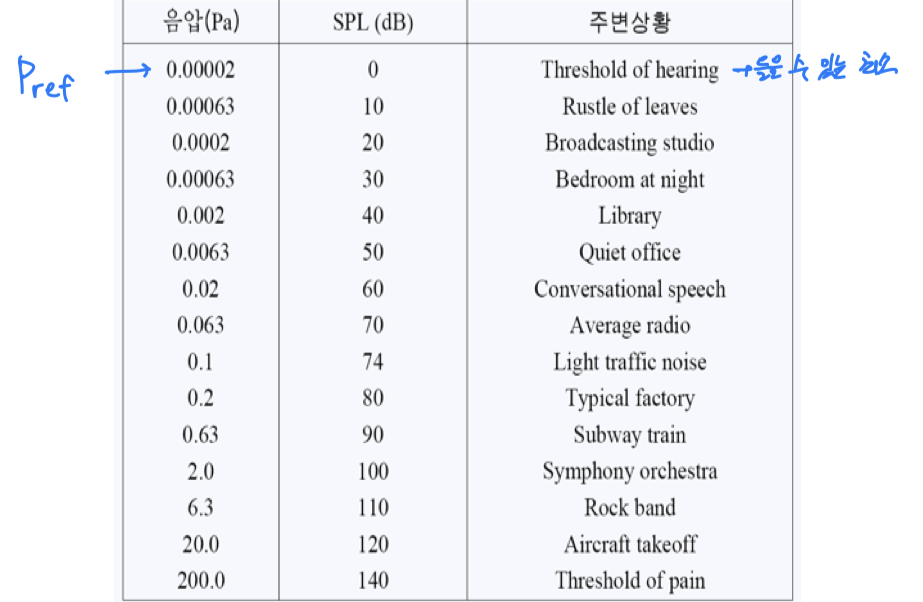
: 기준값. 들을 수 있는 최소의 단위.
-
-
example : 60 dB는 몇 Pa인가?
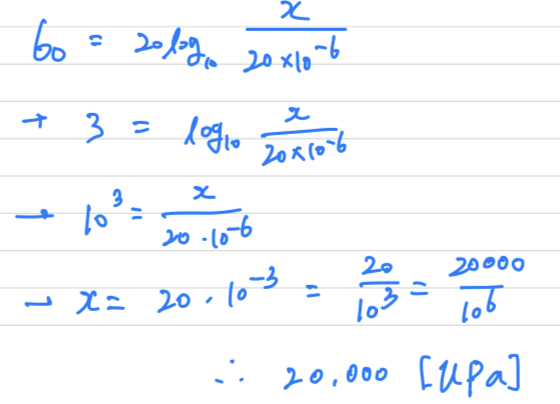
-
환산표 :
Multiple Sound Sources
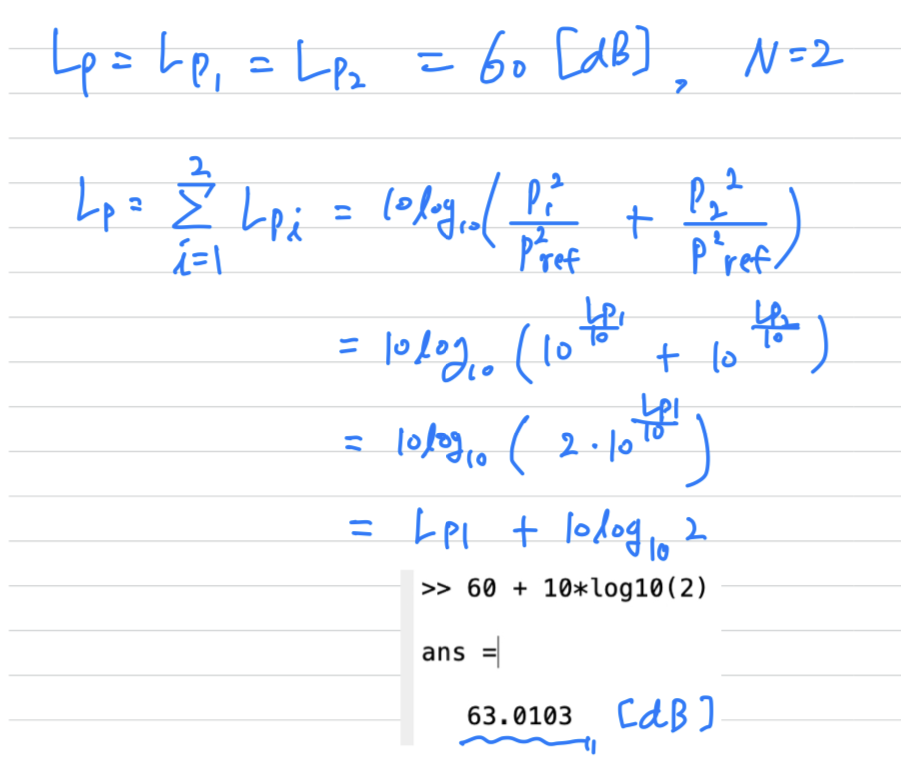
- 만약 SPL이 똑같은 N개의 서로 관련없는 음원이 존재할 때, 계측되는 전체 SPL은 어떻게 될까?
(SPL은 log scale로 측정되기 때문에, 단순히 더해서는 안된다.)
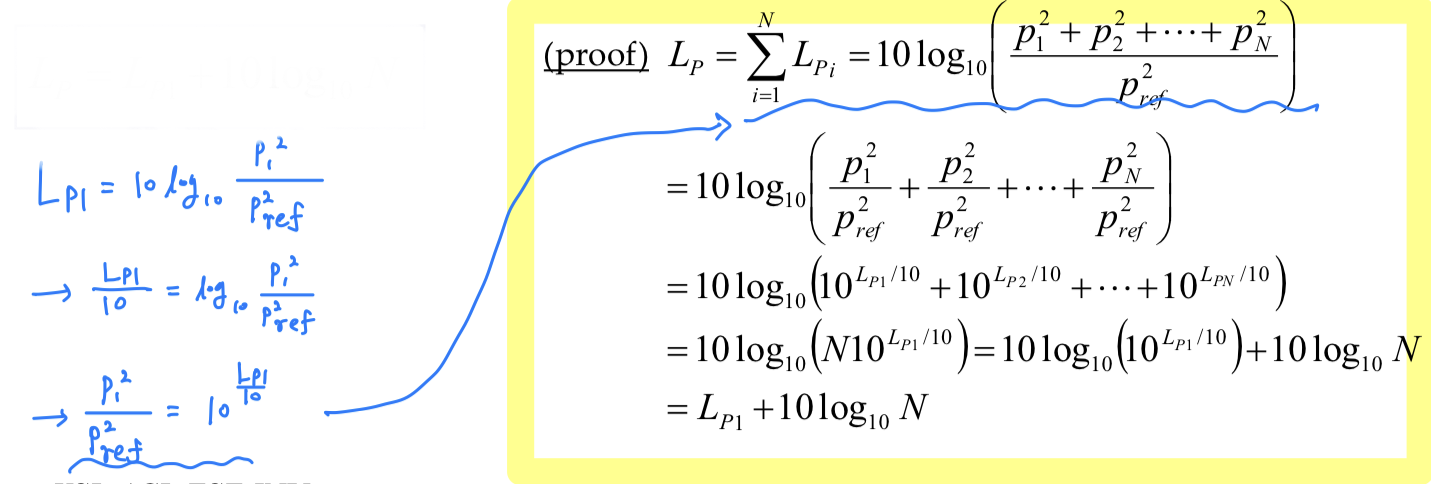
example: SPL이 60dB인 2개의 음원이 있다. 이 두 음원을 계측할 때, 전체 SPL은?
초음파 센서
초음파 센서의 종류
-
receiver: Sensor의 일종. 음파나 초음파를 전기신호로 변환하는 장치.- microphone : 고체나 기체 진동을 감지하는 경우의 sensor.
- hydrophone : 액체 속에서 동작하는 경우의 sensor.
-
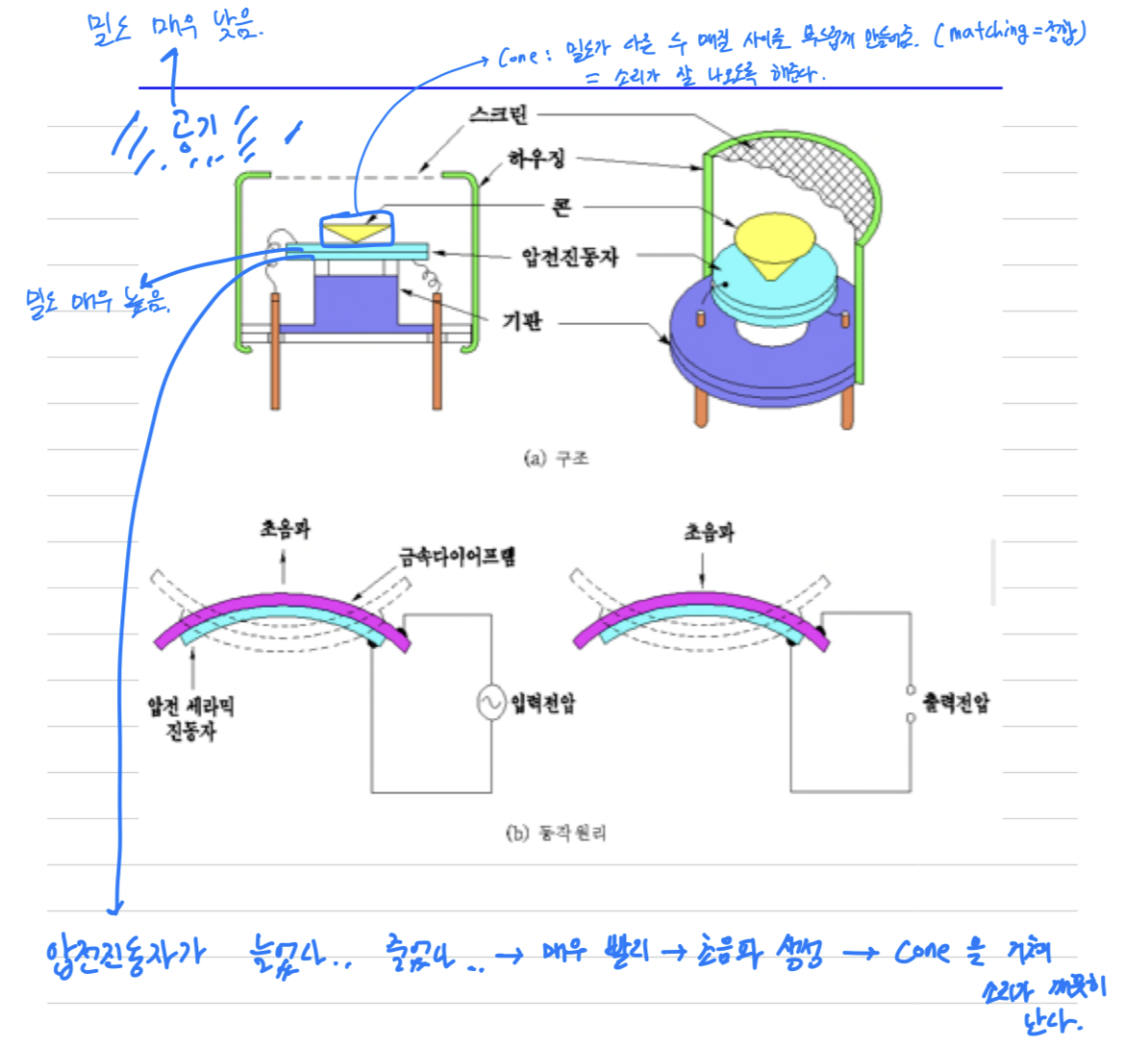
transmitter: Actuator의 일종. 전기신호를 음파(초음파)로 변환하는 장치.- speaker
-
초음파 transducer: receiver와 transmitter, 두 변환기는 초음파의 발생과 검출이 가능하여 초음파 transducer라고 부른다. -
오늘날 음파센서는 단순히 음파(초음파) 검출에만 국한되지 않고 응용범위가 점점 확대되고 있으며, 화학량 측정, 바이오센서 등에 널리 응용되고 있다.
그 중 대표적인 sensor탄성파(SAW) sensor이다.
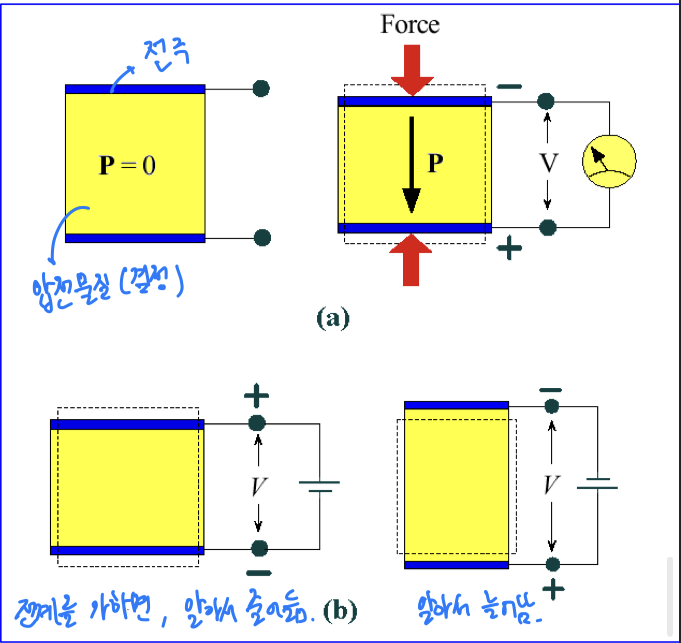
압전 효과
압전 효과: 압력 세기에 따라 전압이 커지는 효과.- 초음파 transducer로 가장 널리 사용하고 있는 원리는
압전 진동자이다.(a): 수정, 산화바륨 등과 같은 결정에 힘을 가하면, 내부에서 전기 분극이 발생하여
결정 표면에 전하가 나타난다.
➡️ 누르는 힘에 따라 전기가 나온다 == sensor 역할(b): (a)와는 반대로, 전계를 가하면 결정이 기계적 변형(늘어나고, 줄어듦)을 일으킨다.
이때 기계적 방향은 인가전계의 방향(+-? -+?)에 의존한다.
➡️ 누르는 힘은 안주고, 전압을 걸었을 때 스스로 기계적 변형. == actuator 역할- (a), (b)와 같은 두 효과를
압전기(piezoelectricity)라고 부른다.
초음파 변환기
임피던스와 공진, 반공진 주파수
임피던스: 전류가 흐르면서 전압이 발생하는데, 이 두 값의 비율을 임피던스라고 한다.- 다음은 주파수에 따른 임피던스를 측정한 그래프라고 가정하자.
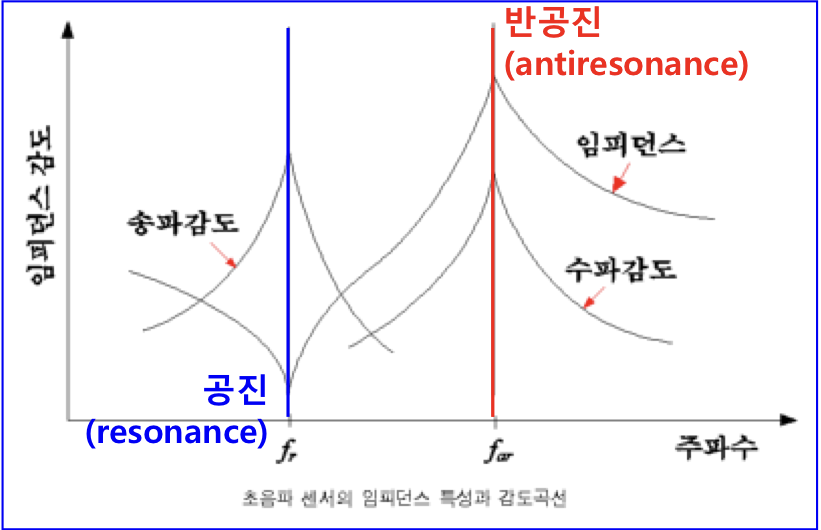
- 일반적으로 초음파 센서의 임피던스는 그림과 같이
아래로 꺼졌다가, 위로 솟았다가, ... 한다. - 임피던스가 밑으로 꺼졌을 때를
공진 주파수(resonance)라고 부른다.
초음파 센서에서 출력을 보낼 때는 공진 주파수를 이용하여 보낸다. - 임피던스가 위로 솟아오를 때를
반공진 주파수(antiresonance)라고 부른다.
초음파 센서에서 sensing할 때는 반공진 주파수를 이용하여 보낸다.
- 일반적으로 초음파 센서의 임피던스는 그림과 같이
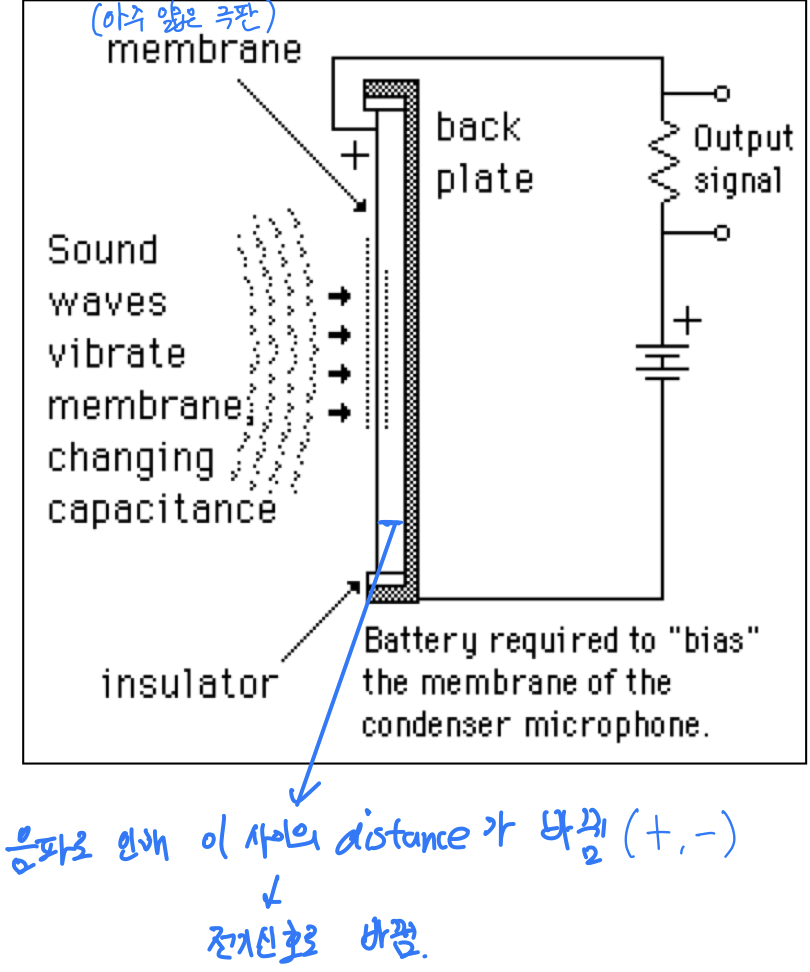
condenser microphone
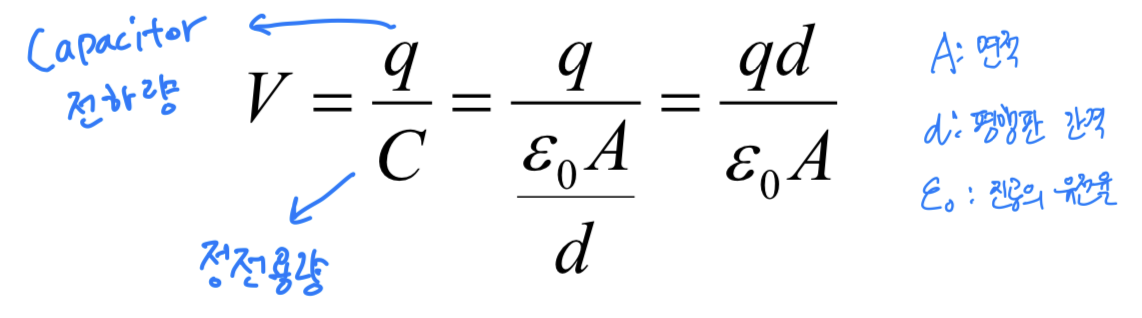
콘덴서 마이크로폰의 동작은 capacitor에 기본을 두고 있다.
평행판 capacitor에 전하 q를 주면, 두 평행판 사이에는 전압 V가 발생한다.
Sonar (Sound Navigation And Ranging)
-
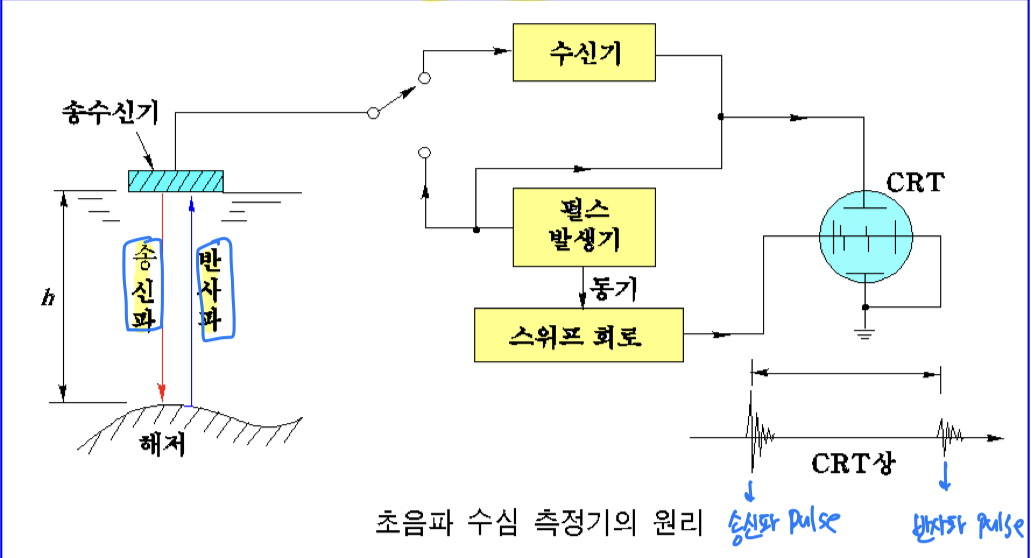
Sonar: 초음파를 발사해서 그 반사파를 수신하는 항해용 수중 음향기기를 총칭한다. -
Sonar의 원리도- : 수심
- : 초음파 Pulse가 수심을 왕복하는 데 걸리는 시간
- : 음속 (물 속에서의 음속은 약 1500m/s)
수심 구하는 공식 :
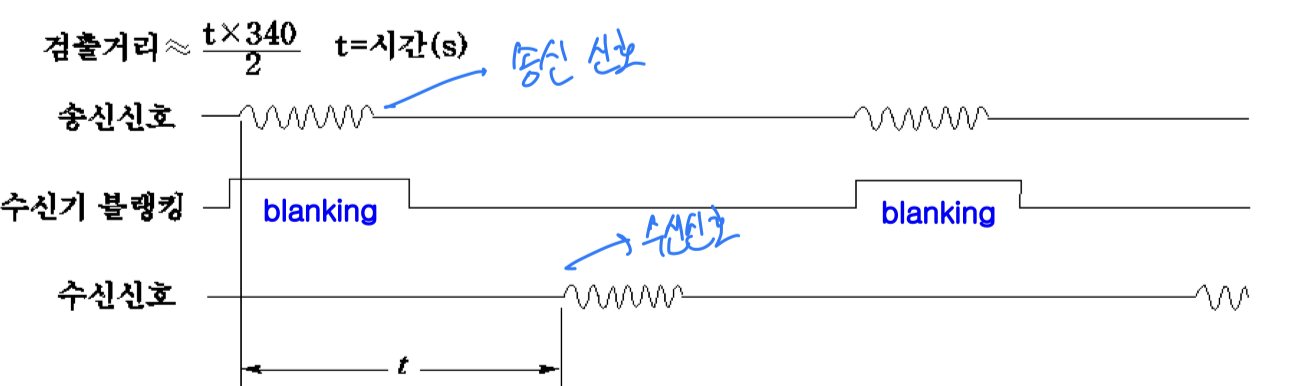
초음파 센서의 검출 원리
- 송신신호를 보낼 때, receiver는 blanking(수신받지 않는 상태)한다.
- 송신신호를 보내고, 수신신호를 받을 데까지의 시간
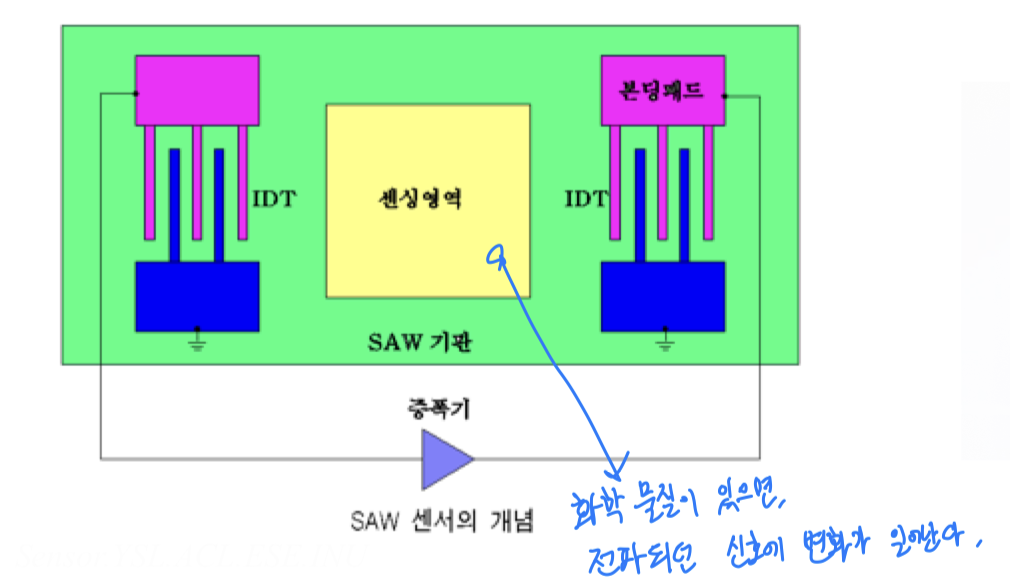
SAW 센서
- SAW(Surcace Acoustic Wave) :
왼쪽에 있는 IDT(송신 IDT)에서 오른쪽에 있는 IDT(수신 IDT)로 wave를 만들어 쏜다.
sensing 영역에서 화학 물질이(가스분자, 생체분자 등) 있으면, wave에 변형이 일어난다.
수신 IDT에서 변화된 양만큼 화학 물질의 양을 추정할 수 있게 된다.
가속도 센서 & 각속도 센서
6 DOF & 9 DOF
-
DOF : Degree Of Freedom
-
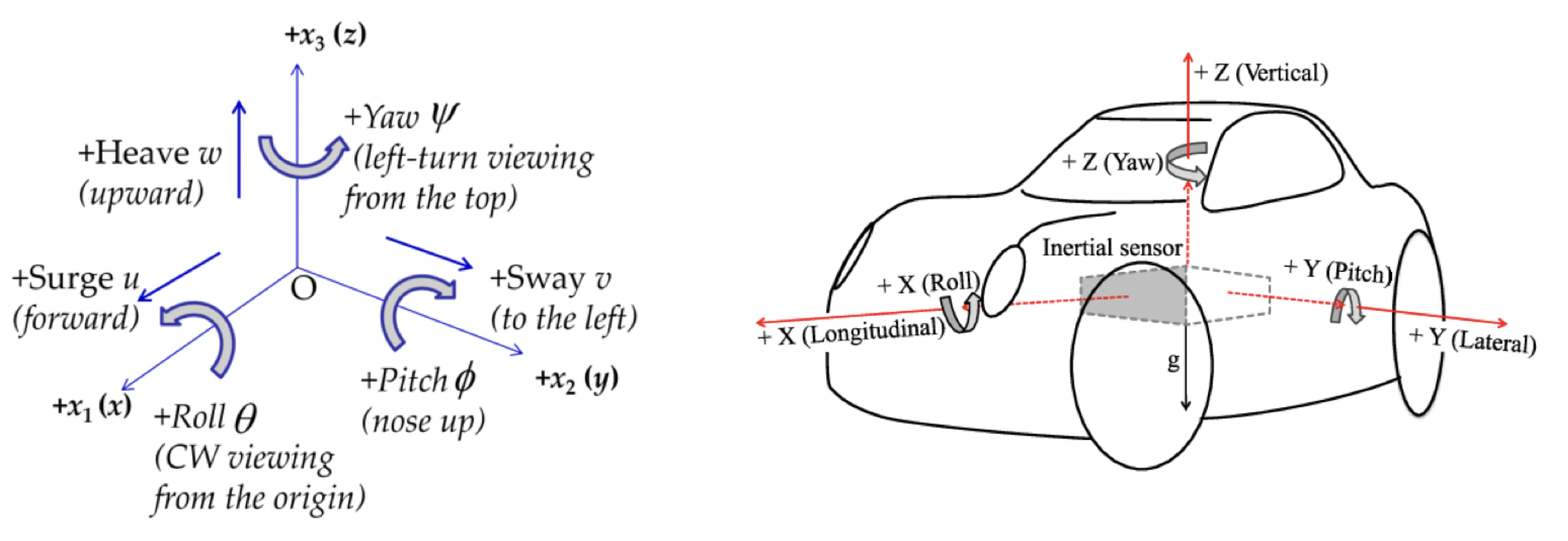
6 DOF:- 직선운동 3개 : surge(ax), sway(ay), heave(az)
- 회전운동 3개 : roll, pitch, yaw
- 악셀, 브레이크 : Surge Motion Controller
- steering wheel : Yaw Motion Contoller
➡️ 3개의 actuator(악셀, 브레이크, steering wheel)만 있으면 운전할 수 있다.
직선운동은 가속도 sensor(Accelerometer)로 측정.
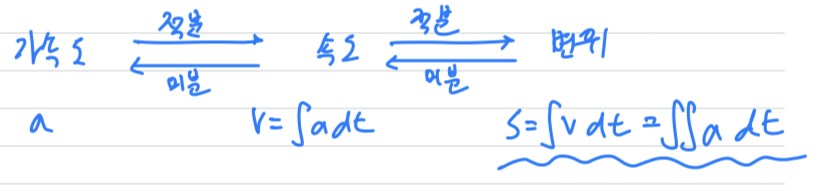
- 왜 가속도 sensor를 사용하는가?
- 미분이 수학적으로는 간단하지만,
회로나 물리적으로 구현하려면 어렵고, 신호가 불안정해진다. - 또한 가속도 센서는 크기가 작고, 저렴, 고장이 잘 안난다.
회전운동은 각속도 sensor(Gyro Sensor)로 측정.- 왜 각 가속도 센서, 각 변위 센서(encoder)는 이용하지 않는가?
- motor 회전 정도는 할 수 있겠지만,
하늘에서 비행기와 드론과 같은 것들은 하늘에 떠 있기 때문에
회전 정보가 급격하게 시시각각 변하여 부정확해진다.
Complementary Filter(상보 필터):
Accelerometer는 그 자체로 사용하기 편리하지만,
Gyro Sensor는 사용하기 쉽지 않다. 신경 써서 무엇인가 setting을 해줘야 한다.
하늘에 떠서 roll, pitch, yaw하는 것은 sensing하기 어렵다.
➡️ Cross Effect : 3개의 motion이 동시에 얽혀서 sensing된다.
서로의 sensing 정보에 영향을 미쳐서 엉망의 값이 sensing된다.
그래서 Complementary Filter는 Cross Effect된 부분을 수학적으로 풀어서 그 부분을 보상 적용해준다.
-
9 DOF: 6 DOF + 3축 지자기센서(x, y, z 방향의 자력치 측정(나침반과 같은))
IMU sensor
IMU(Inertial Measurement Unit): 관성측정장치- 6 DOF type :
3축 가속도센서(surge, sway, yaw rates) + 3축 자이로센서(roll, pitch, yaw rates) - 9 DOF type : 6 DOF + 3축 지자기센서(나침반 기능)
- 6 DOF type :
- 차량 중앙에 IMU sensor를 통해
가속도 정보(surge, sway, heave)와
각속도 정보(roll, pitch, yaw)정보를 받아 CAN으로 차량에 다양한 제어를 할 수 있게 된다.- IMU sensor(product) :

- IMU sensor(product) :
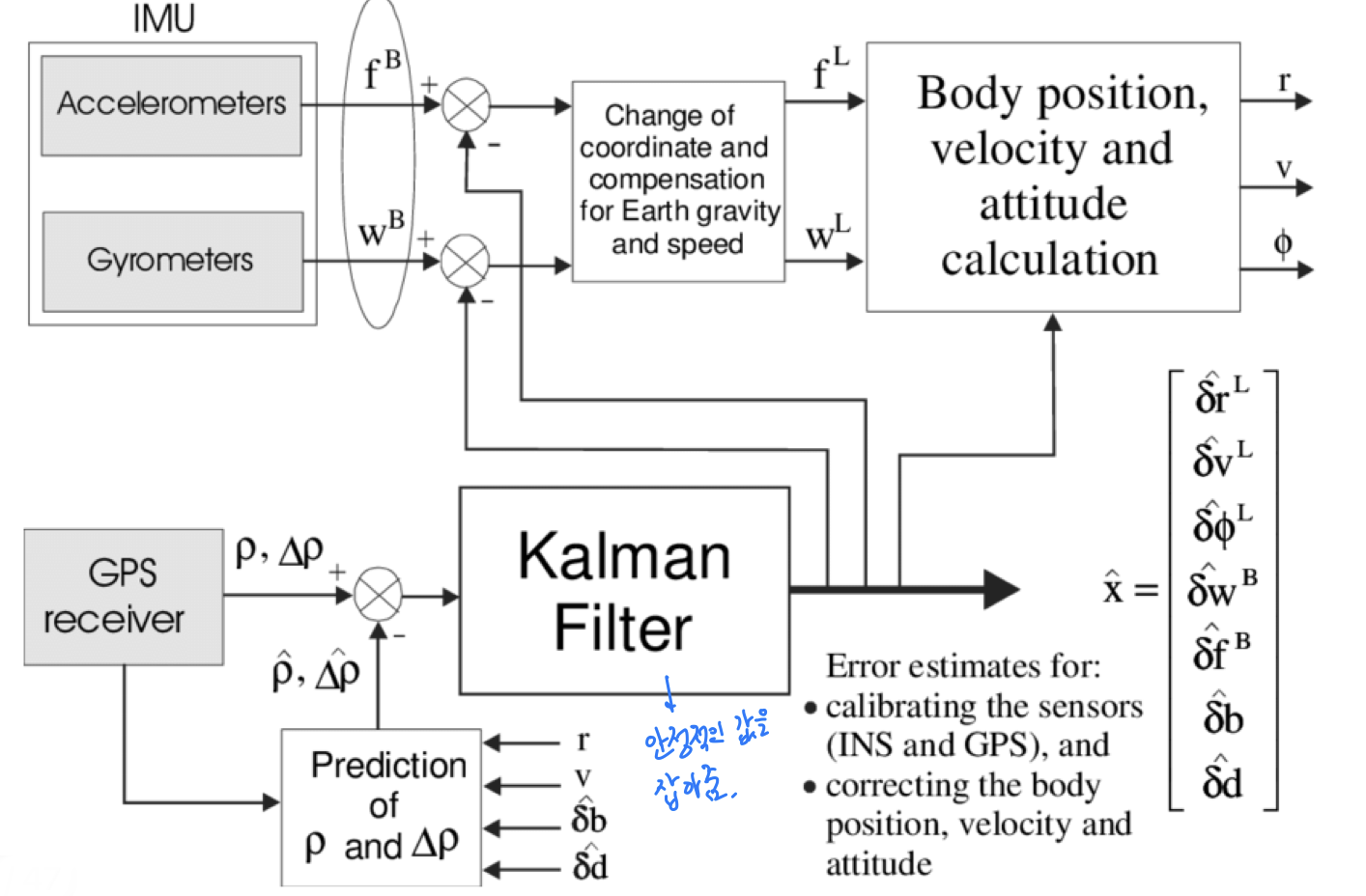
- 자율주행에 있어서 IMU도 중요하지만, Kalman Filter가 없으면 자율주행을 할 수가 없다.
Cross Effect 때문에 sensing된 값이 계속 튀게 된다. (차가 불안정해진다)
따라서 sensing된 값을 Kalman Filter에 넣어 안정적인 값으로 만들어서 자율주행에 사용한다.
(Kalman Filter 공부는 4학년 로봇공학 수업때 ...)